
Abstract
In this paper, a single-phase inverter for avionics application is designed. Usually, the load in the aircraft works on high frequency and with a specific power supply. In the proposed work, a single-phase inverter of 115 V, 400 Hz is designed with an input DC power of 28 V. For the proposed system, DC-DC SEPIC converter is used to step up the input voltage to achieve high gain and an H-bridge inverter followed by a filter to get sinusoidal output. To improve power quality, high efficiency and low total harmonic distortion value closed-loop implementation are validated through detailed simulation in MATLAB Simulink and experimentally verified using a prototype hardware model to get high frequency.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- SEPIC converter
- H-bridge inverter
- LC filter
- Feedback loop
- MOSFET
- Gate driver
- Total harmonic distortion (THD)
1 Introduction
The communication, navigation, and other control systems in the aircraft mainly depend on the electric power supply. The electric power for the aircraft is supplied by the generator coupled with an engine or through a battery source for the backup, as the load in the aircraft must have a constant electric power supply without any interrupt [1]. The generator coupled with an engine is known as the primary power source, and the battery source is known as a secondary source. The technology in the field of power electronics is recently increasing due to its low power loss and easy to control. The secondary source is designed with an inverter and DC-DC converter units [2]. Usually, the loads in the aircraft work on high frequency because of its advantages like less machine weight, smaller, or lighter power supply as the size of the machine is reduced. Though the resistive losses are increased with high frequency, while designing the major concern is about the size, and weight therefore losses are neglected [3]. For an uninterrupted power supply to the load, a power supply is designed for 115 V, 400 Hz with 28 V. To achieve more efficiency and low total harmonic distortion (THD), a transformer-less inverter topology is designed to get desired output frequency and voltage. Instead of a transformer, a passive filter is used to reduce the THD and to get desired output wave shape [4]. In the first stage, to boost the input voltage. A switched-mode power supply boosts the input DC voltage by turning on and off a controlled switch. SEPIC converter is designed. It has advantages like non-inverting output, diode work as a reverse blocking mode. A comparative study is made with different DC-DC converters, and it concluded that using SEPIC converter isolation for input and output is easy, and maximum efficiency is obtained [5, 6]. In the second stage, an inverter is used to convert direct current to alternating current. Sinusoidal pulse width modulation (SPWM) technique is used as it has the advantages of using a small filter at the output, reducing the harmonic distortions [7, 8]. Finally, to obtain sinusoidal waveform output filter is used to convert square wave to sinusoidal wave [9]. In [10], a study is made between synchronous pulse-width modulation and output filter-based inverter. It was concluded that for a load that is sensitive to sinusoidal waveform output filter should be used to reduce the distortions and to achieve pure sinusoidal waveform [11]. In [12], three-phase aircraft is designed from AC main. Here, space vector modulation technique is used to control the inverter switches. Current harmonics of 3% are achieved. All the loads connected to the system are nonlinear which produce harmonics that distort the sinusoidal waveform. According to IEEE standard [13], the fundamental current harmonics should be limited to 5% and the voltage to 8%. In [14], the individual frequency voltage harmonics is 2.3% and current is 4%. In our proposed system, the current and voltage harmonics are made less than 1%.
2 Proposed Method
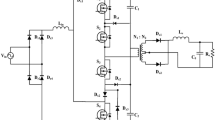
Figure 1 shows the overall circuit diagram of the project. A 28 Vdc is converted to 115 Vac of 400 Hz. There are two stages of conversion required to achieve the output voltage. The first stage is to boost the input voltage by using a DC-DC converter, and the second stage is to use an inverter to convert the DC voltage to the required AC voltage.

Block diagram of the proposed method
In the first stage, 28 Vdc is converted into 200 Vdc by using a SEPIC converter. A PI controller is used to control the duty cycle of the active switch in the converter. In the second stage, 200 Vdc is converted into AC voltage by using an inverter. The output of the inverter is a square wave. To convert it into a sinusoidal waveform, an LC filter is used at the output. PWM technique is used to generate the pulses.
3 Circuit Design and Functions
3.1 SEPIC Converter
The primary step of boosting the input voltage is done by using a SEPIC converter. 28 Vdc input voltage is stepped up to 200 Vdc. SEPIC converter is a buck-boost converter which gives non-inverting output voltage. As the inductor core is connected to the same core, the electromagnetic induction noise is reduced in the SEPIC converter when compared to the boost converter and therefore the input filter can be reduced [15].
Figure 2 shows the circuit of the SEPIC converter. The SEPIC converter is designed for 200 Vdc, 250 W from 28 V input. Here, closed-loop implementation is done using a PI controller [16]. If there is any variation in the output voltage value, the PI controller adjusts the duty cycle of the MOSFET switch and the output voltage is controlled and made constant.

SEPIC converter
3.2 Design Parameters of SEPIC Converter
The duty cycle D of the system is [17]
where \({V}_{\mathrm{out}}\) is the output voltage, VD is diode forward voltage, and Vin is the input voltage.
The load resistance R can be expressed as
where \({P}_{\mathrm{out}}\) is the output power.
The output current and the inductor current can be calculated as the system are expressed as
where R is the load resistance.
Iout is the output current.
IL1 is the L1 current.
IL2 is the L2 current.
Therefore, inductor L1, L2 and capacitor C1, C2 can be calculated [18]. The calculated values are mentioned in Table 1.
3.3 H-Bridge Inverter
Figure 3 is the H-bridge inverter. In this, both the modes are explained. In mode one, switch S1 and S2 are on. Therefore, the current flow through Vdc+, S1, load, S2, and back to Vdc−. The LC filter is used to smoothen the output waveform that is the square waveform is converted to a sinusoidal waveform [9].

H-bridge inverter
In the mode two, switches S3 and S4 are turned on. Therefore, the current flows through Vdc+, S3, load, S4, and back to Vdc−. In mode one, a positive cycle of the output waveform is obtained. In mode two, negative cycles of the voltage are obtained. The unipolar SPWM technique is used to generate the pulses for the MOSFET switches. The sinusoidal waveform is compared with the triangular waveform to generate the pulses. From a comparative analysis, it is deduced that the unipolar pulse width modulation technique improves the power quality and decreases the THD by properly selecting the frequency modulation index [19].
3.4 Design of LC Filter
The inverter output is connected with a full load, the maximum current (Imax) flowing through it, and the minimum voltage (Vmin) is noted. The filter component \({L}_{f}\) and \({C}_{f}\) are calculated using the following expressions [1].
4 Simulation Results and Discussion
The circuit has been simulated in the MATLAB platform, and the results were analyzed to check the quality of the design.
Figure 4 shows the overall simulation of the aircraft system. There are two stages of conversion. In the first stage, the input voltage of 28 V is boosted to 200 V using a SEPIC converter and the output of the SEPIC converter is given to the inverter to convert DC voltage to AC and followed by an LC filter. In the first stage, SEPIC converter boost 28–200 V. Here, 196 V is achieved. 196 V is given to the inverter to convert DC voltage to AC. At the output before filter, 189 V of square waveform is obtained. To convert square to sinusoidal waveform LC filter is designed. From the simulation, it is observed that the output voltage is 115.5 Vac (RMS) and the current is 2.18 A (RMS).

Proposed method simulation
Figure 5 is the output voltage of the SEPIC converter which is near to 200 V. Figures 6 and 7 are the inverter output current and voltage waveform. It is observed from Fig. 7 that the peak voltage is 163 Vm, and the time required to complete one cycle is 2.48 ms, therefore, the frequency is 401 Hz.

SEPIC converter output voltage

Inverter output current

Inverter output voltage
Figures 8 and 9 show the total harmonic distortions of the current waveform and voltage waveform. The THD obtained is 0.78% for the analysis.

THD analysis of inverter output current

Inverter output voltage THD analysis
The comparative analysis of overall system is done as mentioned in Table 2.
5 Prototype Experimental Model
A prototype model of the aircraft model is designed to obtain 400 Hz frequency at the output of the inverter. In this model, SEPIC converter is designed for 35 V output from 12 V in input and an H-bridge inverter is constructed with MOSFET switches to get AC output with 400 Hz.
The main components are the inductor, capacitor, and switching regulator. XL6009 IC is used as a switching regulator.
Figure 10 shows the XL6009 IC pin diagram. XL6009 IC is used for closed-loop implementation. The input voltage ranges from 5 to 30 V which makes it possible to use a smaller inductor. The IC support output is current up to 3 A.

PIN configuration of XL6009 [20]
Figure 11 shows the SEPIC converter model for the prototype model. The position of L1 and L2 decides the modes of operation of the converter. The capacitor C1 is used to remove the transients from the input supply. Capacitor C2 is used for isolating two inductors. Here, Schottky diode is used as it has a fast recovery time and less noise.

Hardware schematic of SEPIC converter [20]
In boost mode, when the input voltage is less than the output voltage L2 is charged and the current flows through the load when the switch is turned off. The output voltage is checked with the voltage divider circuit, and the duty cycle is skipped to sync the output voltage to the required value.
5.1 Gate Driver
The pulses for H-bridge MOSFET are generated from Arduino Uno. The generated pulses are given to the gate driver which provides isolation between input and output. TL250 is used as a gate driver. The signal from the Arduino is given as input to the driver IC. TLP250 is a high-speed linear optocoupler.
Figure 12 shows the driver circuit, where C1 and C2 are decoupling capacitors and resistors R2 and R3 are used to amplify the signal to drive the switch. The input resistance R1 depends on the input voltage to offer a certain driver current. Care must be taken in making a different ground connection for high-voltage and low-voltage sides. As it cannot be connected to the same core because it will lose isolation [21].

Gate driver circuit
The program flowchart for driving the MOSFET in inverter circuit is shown in Fig. 13. First, the input ports and serial communication port are initialized. Pin 3 is set high, and Pin 5 is set low. After a delay of 1250 μs delay, pin 3 is set low and pin 5 is set high.
Figure 14 shows the complete hardware model. In the first stage, 12 V input is boosted using a SEPIC converter to 35 V. The output of the SEPIC converter is given as the input to the H-bridge inverter. A step-down transformer is used for the voltage source for the gate driver. The pulses are generated from Arduino Uno. To trigger MOSFET switches, four gate driver circuits are used. The output of the inverter is observed in the oscilloscope.
Figure 15 shows the output voltage waveform of the inverter on the oscilloscope. The amplitude value is the peak-to-peak voltage that is 65.60 V, and the frequency is 392.70 Hz. The rise time and fall time are 20 μs, and the width of the waveform is 1.26 ms. Usually, the output frequency of the inverter is 50/60 Hz, for a particular application like avionics the circuit is designed to get 400 Hz.

Flowchart of Arduino program

Complete hardware setup

Inverter output voltage
6 Conclusions
In this work, the high-frequency system for aircraft application was designed. A 115 V of 400 Hz was designed and simulated using a SEPIC converter and H-bridge inverter. This work was experimentally analyzed using a prototype hardware model of 32 V, 2.5 A. The overall efficiency of the proposed system was 88%, and the total harmonic distortion of 0.78 was analyzed for inverter output current using FFT analyzes which is less than IEEE standard. The proposed system was simulated in MATLAB (R2018a).
References
M.N. Parripati, V.S. Kirthika Devi, A single phase DC-AC inverter for aircraft application, in International Conference on Inventive Systems and Control (ICISC) (2020)
O.D. Dsouza, P. Manjunath, S. Arjun, Design of a single phase inverter for aircraft applications. Int. J. Innov. Technol. Explor. Eng. (IJITEE) (2019)
E. Sener, G. Ertasgin, Design of a 400 Hz current-source 1-ph inverter topology for avionic systems, in 5th International Conference on Advanced Technology & Sciences (ICAT'17), Istanbul, Turkey May 09–12
Md. K. Islam, Md. M. Rahman, Md. F. Rabbi, Transformer less, lower THD and highly efficient inverter system, in 2015 International Conference on Advances in Electrical Engineering (ICAEE), Dhaka, Bangladesh, 17–19 Dec 2015
C. Verma, B. Anjanee Kumar, Comparison of dc-dc converters with SEPIC converter for wind driven Induction generators. Int. J. Eng. Trends Technol. (IJETT) 39, 180–183 (2016)
V. Sharma, U. Sultana, U.K. Gupta, Designing of modified SEPIC converter for LED lamp driver. IJLTEMAS (2014)
N.F. Abdul Hamid, M.A. Abd Jal, N.S. Syahirah Mohamed, Design and simulation of single phase inverter using SPWM unipolar technique, in ICE4CT 2019 Journal of Physics: Conference Series (2019)
J. Soomro, T.D. Memon, M.A. Shah, Design and analysis of single phase voltage source inverter using unipolar and bipolar pulse width modulation techniques, in International Conference on Advances in Electrical, Electronic and System Engineering, Malaysia (2016)
W. Zhang, X. Zhang, W. Liu, W. Li, Modeling and simulation of aviation static inverter based on Dymola and Modelica, in International Conference on Aircraft Utility Systems (AUS) (2016)
M. Bilal Cheema, S. Ali Hasnain, M. Maaz Ahsan, et al., Comparative analysis of SPWM and square wave output filtration based pure sine wave inverters, in IEEE 15th International Conference on Environment and Electrical Engineering(EEEIC), Rome, Italy, 10–13 June 2015
A. Ahmad, S. Maqbool, Square wave inverters—a performance comparison with pure sine wave inverters. Int. J. Res. Electron. Comput. Eng. (IJRECE) (2019)
G.L. Basile, S. Buso, S. Fasolo, P. Tenti, P. Tomasin, A 400 Hz, 100 kVA, digitally controlled UPS for airport installations, in Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No.00CH37129) (2000)
IEEE Recommended Practice for Conducting Harmonic Studies and Analysis of Industrial and Commercial Power Systems, IEEE-SA Standards Board, 27 Sept 2018
C. Rivetta, F. Arteche, F. Szoncsó, A common 400Hz AC power supply distribution system for CMS front-end electronics. in 8th Workshop on Electronics for LHC Experiments (2002)
M. Umavathi, K. Udhayakumar, D. Thanya, Investigation on solar-wind hybrid renewable energy system using single SEPIC converter, in National Conference on Advancement in Electrical Sciences at SNS College of Technology, Coimbatore, 13 Apr 2019.
H.H. Tesfamikael, A. Fray, I. Mengsteab, A. Semere, Z. Amanuel, Construction of mathematical model of DC servo motor mechanism with PID controller for electric wheel chair arrangement. J. Electron. Inform. (2021)
I.A. AlMohaisin, A.A. Mahfouz, V.T. Akhila, A review on SEPIC converter topologies. Int. J. Res. Eng. Sci. Manage. (2019)
J. Leema Rose, B. Sankaragomathi, Design, modeling, analysis and simulation of a SEPIC converter. Middle-East J. Sci. Res. 24 (2016)
G.M. Tina, G. Celsa, A Matlab/Simulink model of a grid connected single-phase inverter, in 50th International Universities Power Engineering Conference (UPEC) (2015)
XLSEMI [Online]. Available: https://datasheetspdf.com/pdf/775384/XLSEMI/XL6009/1
J. Xu, K. Han, The single-phase inverter design for photovoltaic system, in International Symposium on Computer, Consumer and Control (2016)
Acknowledgements
Many people merit my true appreciation for helping me to finish this project. First and chief, I want to express my true appreciation to my Guide Dr. Umavathi M, Assistant Prof. Dept. of EEE, B.M.S. College of Engineering, Bull Temple Road, and Bengaluru for her significant direction and assistance.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Lavenya, K., Umavathi, M. (2022). Design and Analysis of Single-Phase Inverter for Avionics System. In: Smys, S., Balas, V.E., Palanisamy, R. (eds) Inventive Computation and Information Technologies. Lecture Notes in Networks and Systems, vol 336. Springer, Singapore. https://doi.org/10.1007/978-981-16-6723-7_49
Download citation
DOI: https://doi.org/10.1007/978-981-16-6723-7_49
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-6722-0
Online ISBN: 978-981-16-6723-7
eBook Packages: EngineeringEngineering (R0)