
Abstract
An intelligent autonomous robot is in demand for robotic operations in the fields such as industry, medical, bionics, military. For any machine, designed to follow a precise sequence of instructions, self-positioning, path framing, map architecture, and obstacle prevention are the prerequisites of navigation. This paper presents a survey about the key navigation approaches explored by various authors in the last decade. The survey has a brief insight into the various approaches used for robot navigation concerning to the variable and invariable nature of the vicinity and the obstacle. The comprehensive look-over presented in this paper provides an in-depth analysis and assessment of the discrete classical and heuristic approaches used by the researchers. The research assessment is finally concluded by aggregating the complete knowledge of the various path planning techniques by reviewing the literature.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The major application of portable robot covers the field of giant industries such as mining, space research, nuclear industry, landmine detection without any human intervention [1]. The essential constraints of the precise and optimal path design are the accessibility of environmental and odometric information [2]. Nowadays smart devices are indulged in every activity of humans to increase the convenience in living [3]. The self-directed mobile robot should define its locus in its frame of orientation by knowing its local coordinates. The mode of plotting navigation entails four main stages [4] as follows:
-
i.
Observation.
-
ii.
Localization/Plotting.
-
iii.
Cognizance/Preparation.
-
iv.
Kinetics control.
In the observation or perception phase, the robot collects the surroundings data with the support of actual sensors. The formation of a local coordinate designates the location of the robot and it acquires the information of the vicinity. Therefore, to know the robot’s position and orientation is called Localization or Plotting. After localization, the robot must plan how to steer to the goal by deciding the path from the source to destination. It is personified as Cognition or preparation of path planning. In the fourth juncture, the robot controls the movement to accomplish the desired trajectory. The preferred route forecasting strategy for mobile robot course-plotting is articulated. This deliberately is proficient in discovering an ideal collision evasion path from the inceptive location of the robot to a terminal position in the ambiguous surroundings as detailed in [5]. The wheel equipped mobile robots are usually seen in industries where mechanical labour is required to do some needful task [6]. The different approaches to solve the problem of triangulation in familiar and unfamiliar surroundings are given in [7]. The two accessions of path planning methodologies [8] are as follows:
-
i.
Global path planning or offline path planning approach.
-
ii.
Local path planning or online path planning approach.
In global path planning methods, the statistics about the location is past perceptive, that is, different variables like the position, size, shape of the obstacle are already provided, whereas, in local path planning methods, no information is provided to the robot about the environment [9]. The mobile robot fetches facts about the location through the sensors throughout its passage [10]. In [2], the doctrine of global path planning methods such as Cell decomposition, Roadmap, Subgoal network, artificial potential field, and Voronoi diagram are not applicable for on-line enactment. Therefore, local path planning approaches such as Neural Network (NN), Genetic Algorithm (GA), Fuzzy Logic (FL) etc. are reliable and have been advised for the operational execution of mobile robot exploration [11, 12].
2 Traditional Procedures Executed for Mobile Robot Navigation
Navigation became the core of research and many intellectuals have conferred a survey paper on the analysis based on the research done [13, 14]. The statistics gathered through the assessment does not provide in-depth sight on the various navigation techniques. The navigational policies have been broadly categorized into two types as classical and heuristic approaches [15].
2.1 Classical Approaches
Cell Decomposition Approach:
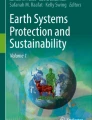
The cell decomposition strategy dissociates the domain area into a non-concurring network. The derived unit forms the effective cells and they achieve the subsequent path from the initial grid to the final grid while the corrupted cells further split into more pure cells and now these cells form the basis to form a new path [16]. The area that is decomposed into smaller units constructs a connectivity graph according to the association between the cells The process is bifurcated into two arrangements: Exact cell decomposition and Approximate cell decomposition [17]. The interpretation of exact cell decomposition gives a brief notion about the motion of a robot. The region is divided into smaller units. And the path is found through the midpoints of the intersection of the adjacent cells. The derived expanse after the arrangement of these units is the same as the initial free space in every aspect. In approximate cell decomposition, the entire framework is in pre-resolute architecture. When the region is intercepted then it is further divided into four smaller cells of the same shape [18] and this repeats itself until it touches the resultant boundaries. The arrangement forms a quadtree (as shown in Fig. 1) which is generally called a cell [19].

Approximate cell decomposition (8-connected and 4-connected grids) [15].
Roadmap Approach:
The roadmap approach is a union of curves such that all initial and goal points can be associated to form a path. It is called a roadmap approach [20]. The two main graphs that are entitled to determine the continuous path are the Voronoi graph and Visibility graphs. Both of them are used to generate the roadmap. Figure 2 depicts the visibility graph in which the colored area represents the obstacle and line showcase different paths which connect the edges of the obstacles and the final configuration is as shown in the highlighted line [21]. The Voronoi diagram [22] is a planner of the roadmap procedure used in a configuration area for determining the path. In this method parabolic curves are formed which are equidistant points from the two obstacles [23]. This enables the robot to navigate in a hassle-free path. Figure 3 shows how Voronoi curves are formed. Many approaches are been developed combining the two graphs and potential field methods [24] to get more precise outcomes.

Visibility graph [15].

Voronoi graph [15].
Artificial Potential Field Approach:
The potential field method is a simple and effective motion planning approach in which potential fields are created to regulate the robot in a certain space [25]. An imaginary force develops between the goal and destination which leads robots to the destination without any hassle as shown in Fig. 4. This method is usually praised by several intellectuals because of its efficiency for effective path scheduling [26]. The charged surfaces create a potent force on the robot and therefore it moves. To enhance the execution of the artificial potential field path planner, numerous techniques such as the genetic Algorithm [27], particle swarm optimization [28] are used.

Artificial potential field approach [15].
2.2 Heuristic Approaches
Fuzzy Logic:
The conception of fuzzy provide valuable flexibility for reasoning [29] and is used in almost all spheres of innovation and advancement, based on human observation and inference, fuzzy rationality systems are stimulated by gained knowledge. On top, a certain set of input values collaborate to transform into a fuzzy set of interpretation rules throughout the fuzzification step. The fuzzification is followed by the defuzzification process where the generated results get altered into another set of values via membership function [30]. Lately, fuzzy logic is being used in collaboration with further navigation techniques [31] to enhance the learning of proximity surroundings. Many researchers are using data-driven approaches to get a more precise result in a dynamic environment. Mamdani used a fuzzy logic regulator deliberately for an automated mobile robot in [32]. To maintain the diversification and to avoid untimely union, fuzzy logic was epitomized in [33] in ant colony optimization. A portable self-balancing robot is used in [34] which provides dedicated feedback mechanism and aims at providing inclusive knowledge of fuzzy concepts and its enactment in the embedded system. In [35] the research aims at providing a hybrid approach in real life situations by improvising fuzzy logic with artificial neural network by reducing the issues of ambiguity, scalability, time complexity etc. The classical gaps are reduced and produce the results that meet the client expectations.
Neural Network:
The neural network approach is a network formed with the aid of interconnected neurons linked artificially. Neural networks have a supervised learning way in which the input nodes can alter information accordingly and generate the best possible outcome [36]. The network further comprises of three individual layers entitled as the input layer, the hidden layer, and the output layer. An activation function is fed to the input layers. The output layers are linked with the hidden layers to produce the results. Two neural networks were used in [37] to generate a collision-free path in a relatively unidentified environment. The neural network upon usage with the blended approach of fuzzy logic provides dual innovative benefits in an unsystematic ailment [38].
Particle Swarm Optimization:
Particle swarm optimization is a well-entrenched algorithm and it is growing at a faster pace than the former algorithms [39]. The basis of this algorithm is the behavioral patterns of living species such as birds or animals. Here every particle tries to adapt itself in a particular position by varying its velocity. For analyzing the navigation of a multitasking robot, Particle swarm optimization is readily used in complex cases depicted in [40]. A controlled strategy with the human inception for the ambiguous environment is analyzed in [41]. Because of more accurate results, it is the becoming of other conventional grids used so far. The methodology gives dual benefits of high precision in a short period.
Ant Colony Optimization:
Ant colony optimization (ACO) is swarm intelligence centered algorithm used to find paths through graphs [42]. Ant colony mimics the behavioral patterns of ants as they reach the destination from the shortest path avoiding collisions. The population produced method is used here to find the favorable trail for movement. The usage in dynamic path planning is reproduced in [43]. Also to enhance the conduct of the present approach in a static environment few contributions are proposed in [44]. The proposal for mobile robot navigation using ant colony optimization in an anonymous predictable ambiance is suggested by [45]. Ant colony optimization has engrossed itself in three dimensional fronts for underwater automobiles where the main agenda is to filter the best suitable concussion free path from source to destination [46]. A new fuzzy approach emphasizes diversity control in Ant Colony Optimization where the main notion is to evade or undermine complete convergence through the dynamic discrepancy of a specific factor [47].
Genetic Algorithm:
Genetic algorithms are constructed on an analogy with genetic composition [48] formulated on the assumption of the “survival of the fittest” theory [49]. Being a metaheuristic algorithm it symbolizes to be a dominant tool for escalation of problems of varied forms. In [50], an adaptive evolutionary planner is used as a novel approach for pathfinding. Multiple mobile robot machines are induced in [51] to navigate in real scenarios. Various operators are involved in [52] such as real coding, fitness functions, and definite genetic operators for mobile steering in an indefinite situation. Conduct of missile control, endowed with the amalgam of the Genetic algorithm method and fuzzy judgment, has been validated in [53]. Genetic algorithm has also inclined its application into the military operations for the decision making of appropriate unmanned aerial vehicles [54]. Genetic algorithm has proven to be a blessing in the research area as described in [55] where the variable length of chromosomes is introduced in genetic algorithm to improve the adaptability of path planning.
3 Discussion
The manifesting literature review on itinerant robot navigation is grounded on the nature of the environment. On drawing comparison, it has been analyzed that the enactment of heuristic methods is comparatively more accurate and preferred than classical methods. The limitations of classical methods involve deceiving in local minima and time complexity in elevated magnitudes. The pie chart in Fig. 5 depicts the percentage area of conventional and Artificial intelligence approaches applied in various fields. Also, Fig. 6 shows the percentage variation of classical approaches and the heuristic approaches being used in years from 1970 to date. In today’s era there is a substantial development made in the field of robot perceiving and navigating their surroundings. For instance in the self-driven coaches, mapping and navigation can endure to further progress but upcoming robots should have a profound understanding in the unexplored and less presumed locations. Some upcoming scope improvements that might be considered may include:
-
To significantly connect and distinguish properties of sights.
-
Improved information of the graphical representation for healthier facts of the vicinity.
-
To determine new entity and hindrance in the location through the live sensors.
-
In an environment where transmission of information in robot swarms is done, it would be complex for a robot to traverse. In such case, a robot should be capable of not only traversing but should be able to perceive the environment to avoid collisions with other robots in the swarm (Table 1).

Reactive navigation approaches.

Development of mobile robot navigation approaches [4].
4 Conclusion
This study provided a review of the approaches in path planning and generation of the shortest path from start to destination. The review elucidated distinct methods in path planning. As per the literature suggested, classical approaches are not well-grounded in terms of reliability and authenticity because of their incompatibility with the precedent surroundings. On the other side, heuristic methods find compatibility with the dynamic and unpredictable nature of the environment. Heuristic methods are resourceful in terms of time computation and are more proficient in terms of memory. However, classical approaches can be enhanced additionally to accomplish elevated results when used in fusion with the heuristic methods. After evaluating the whole assessment of the literature, the following viewpoints have come up and are stated as below:
-
Mobile robot navigation is magnificently executed by various Local and Global based methodologies.
-
The AI grounded methods are more feasible as it provides results in dynamic situations with more precision than the nature inspired methods.
-
The study on mobile robot navigation by employing the nature inspired algorithm is very restricted for path design in convoluted and anonymous ambience.
References
Truong, X., Ngo, T.D.: Toward socially aware robot navigation in dynamic and crowded environments. IEEE Trans. Autom. Sci. Eng. 14, 18 (2017)
Goyal, J.K.: A new approach of path planning for mobile robots, pp. 863–867 (2014)
Sharma, R., Sharma, A.: A review on interoperability and integration in smart homes. In: Singh, P.K., Sood, S., Kumar, Y., Paprzycki, M., Pljonkin, A., Hong, W.-C. (eds.) FTNCT 2019. CCIS, vol. 1206, pp. 116–128. Springer, Singapore (2020). https://doi.org/10.1007/978-981-15-4451-4_11
Thoa, T., Copot, C., Trung, D., De Keyser, R.: Heuristic approaches in robot path planning: a survey. Rob. Auton. Syst. 86, 13–28 (2016)
Kavraki, L.E., LaValle, S.M.: Motion planning. In: Siciliano, B., Khatib, O. (eds.) Springer Handbook of Robotics, pp. 109–131. Springer, Heidelberg (2008). https://doi.org/10.1007/978-3-540-30301-5_6
Papachristos, C., et al.: Autonomous exploration and inspection path planning for aerial robots using the robot operating system. In: Koubaa, A. (ed.) Robot Operating System (ROS). SCI, vol. 778, pp. 67–111. Springer, Cham (2019). https://doi.org/10.1007/978-3-319-91590-6_3
Zhang, H., Lin, W., Chen, A.: Path planning for the mobile robot: a review. Symmetry (Basel) 10(10), 450 (2018)
Sai, A., Haran, H.: A survey of autonomous mobile robot path planning approaches, pp. 27–29 (2017)
Raja, P.: Optimal path planning of mobile robots: a review. Int. J. Phys. Sci. 7(9), 1314–1320 (2012)
Goerzen, C., Kong, Z., Mettler, B.: A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. Theory Appl. 57(1–4), 65–100 (2010)
Wang, L.C., Yong, L.S., Ang, M.H.: Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment. In: IEEE International Symposium on Intelligent Control - Proceedings, pp. 821–826 (2002)
Atyabi, A., Powers, D.M.W.: Review of classical and heuristic-based navigation and path planning approaches. Int. J. Adv. Comput. Technol. 5, 1 (2013)
Yang, L., Qi, J., Song, D., Xiao, J., Han, J., Xia, Y.: Survey of robot 3D path planning algorithms. J. Control Sci. Eng. (2016). https://www.hindawi.com/journals/jcse/2016/7426913/. Accessed 27 June 2020
Hoy, M., Matveev, A.S., Savkin, A.V.: Algorithms for collision free navigation of mobile robots in complex cluttered environments: a survey. Robotica (2015). https://www.scopus.com/inward/record.uri/. Accessed 27 June 2020
Patle, B.K., Babu L, G., Pandey, A., Parhi, D.R.K., Jagadeesh, A.: A review: on path planning strategies for navigation of mobile robot. Def. Technol. 15(4), 582–606 (2019)
Milos, S.: Roadmap methods vs. cell decomposition in robot motion planning. WSEAS (2007). https://www.semanticscholar.org/paper/Roadmap-methods-vs.-cell-decomposition-in-robot-Seda/. Accessed 27 June 2020
Regli, W.: Robot Lab: robot path planning. Lecture notes of department of computer science. Drexel University. https://www.google.com/search?q=Regli+W.“RobotLabArobotpathplanning/. Accessed 27 June 2020
Schwartz, J.T., Sharir, M.: On the ‘piano movers’ problem I”. The case of a two‐dimensional rigid polygonal body moving amidst polygonal barriers. Commun. Pure Appl. Math. 36(3), 345–398 (1983)
Ajani, S.N., Amdani, S.Y.: Path planning techniques for navigation of mobile robot: a survey. IOSR J. Eng. 09(5), 77–84 (2019)
Latombe, J.-C.: Roadmap methods. In: Robot Motion Planning, pp. 153–199. Springer, Boston (1991). https://doi.org/10.1007/978-1-4615-4022-9_4
Siméon, T., Laumond, J.-P., Nissoux, C.: Visibility-based probabilistic roadmaps for motion planning. Adv. Robot. 14(6), 477–493 (2000)
Choset, H., et al.: Kavraki Lab | Principles of Robot Motion: Theory, Algorithms, and Implementation. MIT Press, Cambridge (2005). https://www.kavrakilab.org/publications/choset-burgard2005principles-of-robot.html. Accessed 06 July 2020
Kim, J.: Workspace exploration and protection with multiple robots assisted by sensor networks. Int. J. Adv. Robot. Syst. 15(4) (2018)
Masehian, E., Amin-Naseri, M.R.: A Voronoi diagram-visibility graph-potencial field compound algorithm for robot path planning. J. Robot. Syst. 21(6), 275–300 (2004)
Khatib, O.: Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Rob. Res. 5(1), 90–98 (1986). https://doi.org/10.1177/027836498600500106
Hwang, Y.K., Ahuja, N.: A potential field approach to path planning. IEEE Trans. Robot. Autom. 8(1), 23–32 (1992). https://doi.org/10.1109/70.127236
Raja, R., Dutta, A., Venkatesh, K.S.: New potential field method for rough terrain path planning using genetic algorithm for a 6-wheel rover. Rob. Auton. Syst. 72, 295–306 (2015)
Kuo, P.H., Li, T.H.S., Chen, G.Y., Ho, Y.F., Lin, C.J.: Migrant-inspired path planning algorithm for obstacle run using particle swarm optimization, potential field navigation, and fuzzy logic controller. Knowl. Eng. Rev. (2016). https://www.cambridge.org/core/journals/knowledge-engineering-review? Accessed 27 June 2020
Zadeh, L.A.: Fuzzy sets. Inf. Control 8(3), 338–353 (1965)
Gul, F., et al.: A comprehensive study for robot navigation techniques. Cogent Eng. 6(1) (2019). Electrical & Electronic Engineering | Review Article
Carelli, R., Freire, E.O.: Corridor navigation and wall-following stable control for sonar-based mobile robots. Rob. Auton. Syst. 45(3–4), 235–247 (2003)
Nazari Maryam Abadi, D., Khooban, M.H.: Design of optimal Mamdani-type fuzzy controller for nonholonomic wheeled mobile robots. J. King Saud Univ. Eng. Sci. 27(1), 92–100 (2015)
Castillo, O., Neyoy, H., Soria, J., García, M., Valdez, F.: Dynamic fuzzy logic parameter tuning for ACO and its application in the fuzzy logic control of an autonomous mobile robot. Int. J. Adv. Robot. Syst. 10(1) (2013)
Odry, Á., Fullér, R., Rudas, I.J., Odry, P.: Fuzzy control of self-balancing robots: a control laboratory project. Comput. Appl. Eng. Educ. 28(3), 512–535 (2020). https://doi.org/10.1002/cae.22219
Singh, Y.V., Kumar, B., Chand, S., Sharma, D.: A hybrid approach for requirements prioritization using logarithmic fuzzy trapezoidal approach (LFTA) and artificial neural network (ANN). In: Singh, P.K., Paprzycki, M., Bhargava, B., Chhabra, J.K., Kaushal, N.C., Kumar, Y. (eds.) FTNCT 2018. CCIS, vol. 958, pp. 350–364. Springer, Singapore (2019). https://doi.org/10.1007/978-981-13-3804-5_26
Chen, J.: Neural Network Definition. Investopedia (2020)
Janglova, D.: Neural Networks in Mobile Robot Motion, December 2004
Pothal, J.K., Parhi, D.R.: Navigation of multiple mobile robots in a highly clutter terrains using adaptive neuro-fuzzy inference system. Rob. Auton. Syst. 72, 48–58 (2015)
Eberhart, R., Kennedy, J.: New optimizer using particle swarm theory. In: Proceedings of the International Symposium on Micro Machine and Human Science, pp. 39–43 (1995)
Tang, Q., Eberhard, P.: Cooperative motion of swarm mobile robots based on particle swarm optimization and multibody system dynamics. Mechanics Based Design of Structures and Machines 39(2), 179–193 (2011)
Chen, Y.L., Cheng, J., Lin, C., Wu, X., Ou, Y., Xu, Y.: Classification-based learning by particle swarm optimization for wall-following robot navigation. Neurocomputing 113, 27–35 (2013)
Dorigo, M., Gambardella, L.M.: Ant colony system: a cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1(1), 53–66 (1997)
Tan, G.Z., He, H., Sloman, A.: Ant colony system algorithm for real-time globally optimal path planning of mobile robots. Zidonghua Xuebao/Acta Autom. Sin. 33(3), 279–285 (2007)
Liu, J., Yang, J., Liu, H., Tian, X., Gao, M.: An improved ant colony algorithm for robot path planning. Soft. Comput. 21(19), 5829–5839 (2016). https://doi.org/10.1007/s00500-016-2161-7
Purian, F.K., Sadeghian, E.: Mobile robots path planning using ant colony optimization and Fuzzy Logic algorithms in unknown dynamic environments. In: CARE 2013 - 2013 IEEE International Conference on Control, Automation, Robotics and Embedded Systems, Proceedings (2013)
Liu, L.Q.: Path planning of underwater vehicle in 3D space based on ant colony algorithm (2008). https://www.researchgate.net/publication/291078044. Accessed 06 July 2020
Castillo, O., Neyoy, H., Soria, J., Melin, P., Valdez, F.: A new approach for dynamic fuzzy logic parameter tuning in Ant Colony Optimization and its application in fuzzy control of a mobile robot. Appl. Soft Comput. J. 28, 150–159 (2015)
Bremermann, H.: The evolution of intelligence: the nervous system as a model of its environment. Department of Mathematics, University of Washington, Seattle, Washington (1958)
Holland, J.: Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence. MIT Press, Cambridge (1992). https://ieeexplore.ieee.org/book/6267401. Accessed 06 July 2020
Xiao, J., Michalewicz, Z., Zhang, L., Trojanowski, K.: Adaptive evolutionary planner/navigator for mobile robots. IEEE Trans. Evol. Comput. 1(1), 18–28 (1997)
Kala, R.: Coordination in navigation of multiple mobile robots. Cybern. Syst. 45(1), 1–24 (2014)
Shi, P., Cui, Y.: Dynamic path planning for mobile robot based on genetic algorithm in unknown environment. In: 2010 Chinese Control and Decision Conference, CCDC 2010, pp. 4325–4329 (2010)
Creaser, P.A., Stacey, B.A., White, B.A.: Evolutionary generation of fuzzy guidance laws. In: IEE Conference Publication, no. 455, pp. 883–888, February 1998
Lin, K.P., Hung, K.C.: An efficient fuzzy weighted average algorithm for the military UAV selecting under group decision-making. Knowl. Based Syst. 24(6), 877–889 (2011)
Ni, J., Wang, K., Huang, H., Wu, L., Luo, C.: Robot path planning based on an improved genetic algorithm with variable length chromosome. In: 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), pp. 145–149, August 2016
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Verma, S., Kumar, N. (2021). Path Planning for Autonomous Robot Navigation: Present Approaches. In: Singh, P.K., Veselov, G., Pljonkin, A., Kumar, Y., Paprzycki, M., Zachinyaev, Y. (eds) Futuristic Trends in Network and Communication Technologies. FTNCT 2020. Communications in Computer and Information Science, vol 1396. Springer, Singapore. https://doi.org/10.1007/978-981-16-1483-5_25
Download citation
DOI: https://doi.org/10.1007/978-981-16-1483-5_25
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-1482-8
Online ISBN: 978-981-16-1483-5
eBook Packages: Computer ScienceComputer Science (R0)