
Abstract
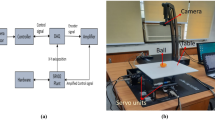
This paper presents the mathematical modeling, design, and implementation of a ball balancer. The aim is to balance the ball at a desired position on the base plate. Ball balancer with two degrees of freedom uses machine vision as feedback and DC servomotors as actuators. Mathematical modeling of ball balancer system is done based on Lagrange–Euler equation, processing of the real-time image, and finding the co-ordinates of the ball is done using Open Source Computer Vision Library software. The co-ordinates of the ball are sent to Arduino through universal serial bus (USB) to transistor—transistor logic (TTL) converter. Perfect balancing of the ball is achieved using a proportional—derivative (PD) controller and pole placement technique. Stability of the designed ball balancer system is verified by its time response analysis using MATLAB/Simulink.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Andrews G, Colasuonno C, Herrmann A (2004) Ball on plate balancing system. Final year project, Rensselaer Polytechnic Institute, New York
Adiprasetya A, Surya Wibowo A (2016) Implementation of PID controller and pre-filter to control non-linear ball and plate system. In: International conference on control, electronics, renewable energy and communications, pp 174–178
https://robotics.benedettelli.com/ball-on-plate-1-nxt/,last accessed 2020
Wang H, Tian Y, Sui Z, Zhang X, Ding C (2007) Tracking control of ball and plate system with a double feedback loop structure. In: International conference on mechatronics and automation, pp 1114–1119
Ali E, Aphiratsakun N (2016) AU ball on plate balancing robot. In: IEEE International conference on robotics and biomimetics. pp 2031–2034
Yip P (2004) Symbol-based control of a ball-on-plate mechanical system. M.S. thesis, Department of Mechanical Engineering, University of Maryland, USA
Debono D, Bugeja M (2018) Application of sliding mode control to the ball and plate problem. Thesis, Department of Systems and Control Engineering, University of Malta
Cheng C, Tsai C (2016) Visual servo control for balancing a ball plate system. Int J Mech Eng Robot Res 5(1):28–32
Jezierski E, Łuczak P, Smyczyński P, Zarychta D (2019) Human–robot cooperation in sorting of randomly distributed objects. Arch Control Sci 29(4):603–615
Andrzejewski K, Czyżniewski M, Zielonka M, Langowski R, Zubowicz T (2019) A comprehensive approach to double inverted pendulum. Archives of Control Sci 29(3):459–483
Xiao J, Buttazzo G (2016) Adaptive embedded control for a ball and plate system. In: The eighth international conference on adaptive and self-adaptive systems and applications, pp 40–45
Frank J, Gomez J, Vikram K (2015) Using tablets in the vision-based control of ball and beam test-bed. In: Proceedings of 12th international conference of informatics in control, automation and robotics. France, pp 92–102
Dusek F, Honc D, Sharma R (2017) Modeling of ball and plate system based on first principle model and optimal control. In: 21st International conference on process control, pp 216–221
Ali E, Aphiratsakun N, AU ball on plate balancing robot. In: IEEE International conference on robotics and biomimetics, pp 2031–203
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sakthi Ganesh, M., Anitha Roseline, J., Sowmya, G., Vishwa Raj, V. (2021). Closed-Loop Vision-Based Ball Balancer. In: Dash, S.S., Panigrahi, B.K., Das, S. (eds) Sixth International Conference on Intelligent Computing and Applications . Advances in Intelligent Systems and Computing, vol 1369. Springer, Singapore. https://doi.org/10.1007/978-981-16-1335-7_1
Download citation
DOI: https://doi.org/10.1007/978-981-16-1335-7_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-1334-0
Online ISBN: 978-981-16-1335-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)