
Abstract
The magnetic stirrer is a common science laboratory equipment, typically used for the mixing of a solution. It is observed that under certain circumstances, the flea of a magnetic stirrer lags behind the driver magnets sufficiently, to the point that it is able to levitate. For this research, we study the onset of this levitation, and quantify the flea’s motion, finding excellent agreement between our analytical model and the flea’s motion. We also study the stability of the levitation, attributing it to the fluid flow, which provides the restoring force for radial stability. These results provide a novel method by which magnetic levitation can be stabilised, allowing for the development of passive magnetic bearings that work at low angular velocity, as well as bidirectional fluid pumps.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Levitation is the process by which an object is held afloat in a stable position, without the need for mechanical support. Magnetic Levitation, specifically, is a method by which repulsive forces between magnets are able to counteract the effects of gravitational acceleration, such that it is able to levitate at a height above the dipole. The two key aspects of magnetic levitation are firstly, the lifting forces, where a magnetic force needs to be able to provide an upward force sufficient to counteract gravity, and stability: ensuring that the system does not spontaneously move out of the levitation state.
In this research, we build on the work of [1] and conduct an investigation into a unique phenomenon that is observed at times in a laboratory, that being the phenomenon whereby a magnetic flea, often used to mix a combination of liquids, is able to levitate as seen in Fig. 1, when placed in a viscous fluid and spun at high angular velocities, contrary to its function of mixing a liquid when placed at the base of the container.

Flea in levitation
We first begin by explaining qualitatively why it should levitate, followed by quantitatively modelling the motion of the flea. We then experimentally verify the liftoff conditions, heights of levitation and the motion during levitation across varying the drive angular velocity and the initial height of the base.
These results can possibly be applied to the development of magnetic bearings. Current methods of building passive magnetic bearings are mostly based on spin-stabilised magnetic levitation [2]. However, such bearings require high spin in order for gyroscopic stability. For example, in reference [2] the top stopped levitating once its angular velocity went below 1000 rpm. The results of this paper allow for a levitation setup to be built, such that the rotating object (in our case the flea) can rotate at relatively low angular velocities, possibly as low as 400 rpm.
In addition, the reversal of flow direction that we observe can be used to build fluid pumps that can cause fluid to move in both directions, without having to make any changes to the mechanism by which the pump works.
2 Experimental Setup
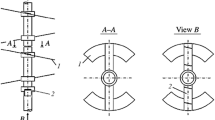
To allow us to vary properties of the magnetic stirrer easily, we opted to build our own magnetic stirrer, comprising of a 3D-printed mould which holds the driving motor magnets in place. The mould is attached to a motor, and the angular velocity of the motor is adjusted through the use of a potentiometer.
The driving motors magnets are two cylindrical magnets, polarized along their axes. They are placed side by side on a plate, with their axes vertical and their magnetizations antiparallel, such that one north pole and one south pole face upwards. We can treat this system of two magnets as being similar to that of one magnet polarized along an axis in the xy-plane—the drive magnet.
In addition, as seen in Fig. 2, the glass beaker is placed on an acrylic plate held up by two lab jacks. The lab jacks enable us to vary the distance between the base of the beaker and the drive magnet, and hence the initial magnetic coupling. We shall denote this distance as \({z}_{b}\).

Experimental set-up
It is experimentally observed that the motion of the flea is only along the axis of the drive magnet, and it rotates only about a vertical axis. As such, unless explicitly stated otherwise, from now on references to quantities such as force will implicitly refer to their vertical component, and quantities such as angular velocity shall refer to that about the vertical axis.
In Fig. 3, we observe that the angular displacement of the flea can be given by (1), where \({\omega }_{s}\) and \({\omega }_{w}\) are known as the spin and waggle frequencies.

Angular displacement of flea in levitation
Two cameras were placed at the side and top of the beaker, allowing for both the rotational motion of the flea about the vertical axis and the vertical motion to be captured. From this, the velocity and the acceleration can be easily determined. To determine \({\omega }_{s}t\) , we time average the angular velocity, while to determine \({\omega }_{w}t\), we perform a Fast-Fourier Transform on the velocity and take the peak frequency.
3 Qualitative Account for the Phenomenon
When the flea is first placed in the container it aligns antiparallel to the driving motor magnets at the base of the container. When spun at low angular velocities, experimentally, the flea behaves just as we would expect—the flea sticks to the drive magnet and spins at a constant angular velocity \(\Omega {\upomega }_{\mathrm{d}}\). We call this motion synchronous.
This synchronous spinning is maintained by the magnetic torque—when the drive magnet spins, it drags the flea along with it, resulting in this synchronous spinning observed. However, the magnetic torque is not the only torque acting on the flea—the drag torque opposes the synchronous spinning, creating a phase lag, where the flea lags slightly behind the drive magnet, as shown in Fig. 4.

Flea on the verge of levitation
As we increase the drive angular velocity, the magnetic torque stays constant. However, the drag torque, which is proportional to angular velocity, increases. This increases the phase lag between the drive and the flea.
As the phase lag increases, the north pole of the flea get further away from the south poles of the drive magnet, while getting closer to the north pole of the drive. Hence, the magnetic force is steadily decreasing. When the phase lag goes past a value of \(\frac{\uppi }{2}\) radians, as seen in Fig. 4 where the flea is perpendicular to the drive, the net magnetic force becomes repulsive. The phase lag continues to decrease until it reaches a point where the magnetic force in the vertical direction is able to overcome the apparent weight of the flea, and thus, lift-off and levitate.
When in levitation, as seen in Fig. 5, the flea is observed to have a sinusoidal vertical motion, with the frequency of this oscillation being identical to the waggle frequency \({\omega }_{w}\). This implies that the vertical motion is coupled to the rotational motion, where the rotational motion provides the vertical stability.

Vertical displacement of flea during levitation
With that in mind, let us consider the condition for levitation to be maintained. This is that the average force must be equal to gravity
However, if we were to allow the flea to spin at a constant angular velocity, the force would time average to zero by symmetry. Thus, the waggling motion provides for an imbalanced time average of the force.
Now it has been established why there is an imbalanced time average, the question of how remains. To do so, let us consider the motion in the rotating frame, where the drive magnet is stationary. We shall assume that the north pole of the drive magnet is on the right, and the flea is on average rotating clockwise.
The positions of the flea can be divided into four quadrants, as seen in Fig. 6, depending on the angle of the north pole of the flea.

Four quadrants of flea’s motion
Let us begin by considering a flea in the 3rd quadrant where the force is attractive, while the torque is decelerating. This causes a decrease in the angular velocity. The flea then rotates to the 4th quadrant.
In the 4th and 1st quadrant, the force is repulsive. Since the angular velocity is low in these regions, this means that the time spent in the repulsive regions is longer than the time spent in the attractive regions. This results in the force being on average repulsive, which is required to maintain levitation against gravity.
We now proceed to discuss the angular motion of the flea in levitation. Figure 7 shows a graph of the angular velocity against time, with the orange line being the angular velocity in the rotating frame. We note that since the torque fluctuates as a function of the angle, the frequency at which the velocity oscillates is also the frequency of oscillation, \({\omega }_{w}{\upomega }_{\mathrm{w}}\).

Angular velocity of the flea
Converting this from the rotating frame to the lab frame, we add the velocity of the frame of reference, which is \(\Omega {\upomega }_{\mathrm{d}}\). The final velocity fluctuates with frequency \(\Omega {\upomega }_{\mathrm{w}}\), which we shall call the waggle frequency, and a mean \({\omega }_{s}{\upomega }_{\mathrm{s}}\), the spin frequency. The amplitude of this fluctuation is given by \({A}_{w}/{\omega }_{w}\) where \({A}_{w}\) \({\mathrm{A}}_{\mathrm{w}}\) is the waggle amplitude.
As for the vertical motion of the flea, we observe experimentally that the flea oscillates about a mean height. From the discussion earlier, the force will oscillate with frequency \({\omega }_{w}\). As seen in Fig. 8, this leads to a similar oscillation of the vertical position of the flea, \(\pi\) radians out of phase with the force. Thus, the flea will reach its lowest height when the force is most repulsive. Since the force is also inversely dependent on the height, this can possibly result in further amplification of the oscillation.

Oscillation of flea
Now, that we have qualitatively accounted for the phenomenon, we proceed to establish a rigorous theoretical account for the phenomenon and verify its validity against experimental data obtained from our experiments.
4 Force Analysis of the Flea
A force analysis, as seen in Fig. 9, shows that the forces acting on the flea are the magnetic, drag and gravitational forces. The torques are the magnetic and drag torques.

Force analysis of flea in levitation
Hence, the equations of motion are given by
where \({\mathrm{F}}_{\mathrm{mag}}{\mathrm{F}}_{\mathrm{mag}}\) and \({\tau }_{mag}\) are the magnetic forces and torques respectively, \({g}^{^{\prime}}\) is the buoyancy-corrected gravitational acceleration, and \(k\) and \({k}_{2}\) are drag coefficients. The magnetic force was characterised using the Biot-Savart Law. Full characterisations of the coefficients can be found in the Appendix. We then solve this equation numerically for the two degrees of freedom \(\phi\) and \(\mathcal{z}\) as functions of time, as shown in Fig. 10.

Solving for motion of flea
5 Verification of Theoretical Model
For the verification of our model, we begin by examining the levitation height. Figure 11 shows the mean height of the flea, z, against the drive angular velocity omega.

Mean vertical position of flea in levitation across multiple drive speeds
Initially, when we increase the drive angular velocity, the flea spins synchronously on the base with an increasing relative phase angle. Eventually, when the angular velocity reaches a critical value, the force will then be repulsive enough to cause the flea to lift off.
In addition, we note that there is a decreasing trend in the average height as the drive frequency is increased. This is since when the drive angular velocity is increased, the relative angular velocity is increased.
We recall that the magnetic force providing for levitation is caused by fluctuations in the angular velocity, and hence an uneven time average. When the relative angular velocity is increased, the fluctuations will then be smaller compared to the mean relative angular velocity, as shown in Fig. 12.

Rotational motion of flea
Hence, there will be a lower difference between time spent in the repulsive regions and time spent in the attractive regions and thus a lower average magnetic force.
Interestingly, we note that when decreasing the angular velocity, the flea becomes unstable and falls at an angular velocity omega down that is smaller than the angular velocity for lift-off omega up. This is due to the conditions for lift-off and falling being different. For the flea to fall, the time averaged magnetic force only needs to be slightly lower than the gravitational force, and the flea will fall.
However, for lift-off to occur, the time averaged magnetic force needs to be higher. For a certain value of the drive angular velocity, there is only one stable levitation height, and the flea needs to lift off until it reaches this height. If it does not reach that height, it will simply fall back down. Hence, the phase lag needs to be high enough such that it can push the flea to this stable levitation height.
Thus, the angular velocity for levitation is higher than the angular velocity for it to fall, and this creates a region in the middle, where the state of the system depends on whether the angular velocity is increased or decreased.
In addition, we can plot the frequencies of spin and waggle against the drive angular velocity, as shown in Fig. 13. Initially, we notice that they follow a linear trend, where the flea spins synchronously at the same angular velocity as the drive magnet. This continues until \({\upomega }_{\uparrow }{\upomega }_{\uparrow }\), where the flea starts levitating.

Frequencies of spin and waggle against drive angular velocity
We also note that the frequency of waggle, \({\omega }_{w}\) asymptotically approaches the drive frequency while the spin speed approaches 0. This is because when the drive angular velocity is extremely large, the fleas angular velocity will be much smaller than that of the drive magnet, and thus it will barely move when compared to the drive. Hence, the torque will oscillate approximately at \(\Omega\), resulting in a waggle frequency \({\omega }_{w}=\Omega\).
We can also plot the angular velocity required for lift-off, \({\upomega }_{\uparrow }{\upomega }_{\uparrow }\) against the initial height difference \({z}_{b}\), as seen in Fig. 14. As the height of the base \({\mathrm{z}}_{\mathrm{b}}{\mathrm{z}}_{\mathrm{b}}\) increases, the angular velocity required for levitation omega up decreases. This happens since the base is closer to the stable levitation height, and hence a lower angular velocity is required to cause the flea to jump up to that height.

Angular velocity for liftoff as a function of base height
In addition, there is a region where erratic behavior occurs in Fig. 15. This erratic behavior occurs when \({\omega }_{\uparrow }<{\omega }_{\downarrow }\). When this occurs, the flea will simply fall down after lifting up, resulting in the erratic behavior mentioned earlier.

Origins of levitation of the flea
6 Radial Stability
Now that we have talked about and modelled the vertical motion of the flea, we must explain the radial stability of its motion. Let us first hypothesize that the radial stability is similarly provided by the magnetic force. In Fig. 16, we consider a flea that is radially perturbed. In this case, we note that since in this region the force is repulsive, the radial component of the force will point outwards. We note from the earlier discussion that the force is on average repulsive. Hence, we conclude that the magnetic force is destabilizing. The stabilizing force must thus be the fluid force.

Radially perturbed flea
In literature [1], it is observed that the radial stability is provided by outward flowing fluid flow, with the flow switching direction when the Reynolds Number is increased, and we now attempt to understand why. To do so, we start with the Navier–Stokes equation, following the first few steps of a derivation given in [3].
For small oscillations, the second term is 2nd order in the velocity and is thus negligible. We then take the curl of the resultant equation, giving
where \({\varvec{\upomega}}\equiv \nabla \times \mathbf{u}\) is the vorticity of the flow. This is analogous to a heat conduction equation, where the conductivity is replaced by the viscosity. This means that the vorticity diffuses further away as the viscosity is increased. As such, when we have a body moving through a fluid, at high viscosity the vortices will diffuse away and this results in the flow following at the body, while at low viscosity the vortices will be confined to the body, resulting in the flow seeming to reverse direction (Fig. 17).

Flow reversal due to vorticity
7 Further Insights
When we decrease the fluid height and making the fluid extremely shallow or decrease the viscosity of the liquid. We observe that there is little inertia and the fluid is easily moved. At very low liquid levels or low viscosities, the fluid moves along with the flea, forming a vortex. The vortex decreases the relative velocity between the flea and the fluid, decreasing the drag force acting on the flea. This decreased drag force then causes the levitation height to decrease, keeping the flea within the fluid.
8 Conclusion and Future Work
In conclusion, we have qualitatively explained the conditions for lift-off due to the phase lag, the asynchronous motion causing dynamic stabilisation of the vertical motion, and the flow switching due to presence and vortices of motion (Fig. 18).

Induced vortex flows
We have also numerically modelled the levitating states, and we see that the model has predictive power over the frequencies of motion, lift-off conditions and levitation heights.
Future work could involve experimental verification of the radial stability, as well as numerically modelling the exact boundary at which the flow will reverse and the flea will lose stability.
References
K. A. Baldwin, J.-B. de Fouchier, P. S. Atkinson, R. J. A. Hill, M. R. Swift, and D. J. Fairhurst. Magnetic Levitation Stabilized by Streaming Fluid Flows, Phys. Rev. Lett. 121, 064502 – Published 8 August 2018. https://journals.aps.org/prl/abstract/https://doi.org/10.1103/PhysRevLett.121.064502
1. Simon, Martin D., Heflinger,Lee O., Ridgway,S. L. (1997), Spin stabilized magnetic levitation, American Journal of Physics https://doi.org/10.1119/1.18488, https://doi.org/https://doi.org/10.1119/1.18488
L. D. Landau, E. M. Lifshitz (1959). Fluid Mechanics. Vol. 6
Acknowledgements
We would like to thank Mr. Sze Guan Kheng, Mr. Harapan Ong, Dr. Wang Guanquan and Mr. Tan Weng Seng from Raffles Institution, Mr. Joel Tan Shi Quan from Yong Loo Lin School of Medicine, Mr. Poh Boon Hor, Mr. Tan Guan Seng and Ms. Yenny Wijaya from NUS High School of Mathematics and Science for their invaluable guidance and support. We would also like to thank the Laboratory Staff at the Cluster Labs for their assistance.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Abdul Jabbar, M., Tan, J.W. (2021). A Comprehensive Study into the Magnetic Levitation of a Magnetic Stirrer. In: Guo, H., Ren, H., Kim, N. (eds) IRC-SET 2020. Springer, Singapore. https://doi.org/10.1007/978-981-15-9472-4_4
Download citation
DOI: https://doi.org/10.1007/978-981-15-9472-4_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-9471-7
Online ISBN: 978-981-15-9472-4
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)