
Abstract
In this paper, MOL algorithm is used in two-area non-reheat thermal power system in the presence of governor dead-band with PID controller is considered. For design and analysis of the purposed system, at first ISE and ISTE two objective functions are considered than 3rd type of objective function which is the modified form by using ISE, ISTE, IAE, ITAE and summation of power deviation and the settling times of frequency. For obtaining the dynamic performance of AGC, PID controller parameters are tuning by applying MOL technique. Then, superiority of MOL techniques is verified by comparing the published result in CPSO-based design of the purposed system. The transient analysis performance of MOL-based PI controller is superior than CPSO-based PI Controller.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
When two or more power systems are interconnected, then its main function is generated, transmitted and distributed power in nominal range of system frequency [1,2,3,4,5]. The change of nominal frequency generally occurs due to mismatch of generation of power and load demand. In order to maintain the balance of net power generation by synchronous machine which is sense for variation of frequency takes place in the power system to use the concept of AGC. As some researcher attempts the LFC of single- and multi-area system by applying different optimization techniques and controllers [6,7,8], the conventional PI type controller attempts in different LFC of single- and two-area system [9]. It shows that in convention PI type of controller, the dynamic performance is very poor in term of settling time of variation of frequency and variation of tie-line power and its overshoot. As in the literature survey, the AGC of fuzzy-based PI with tabu search algorithm applied in two-area system for LFC [10]. The LFC of generalized neural network with different controllers in AGC system is proposed in [11], the fuzzy logic-based controller in multi-area system [12], and fuzzy-neuro in hybrid approach [13]. In this paper, the Many Optimizing Liaisons (MOL) algorithm is used for optimization for controller parameters [14]. In the propose analysis the optimal design of MOL algorithm-based two areas with governor dead-band by considering PI and PID controllers. The purpose analyses of modified fitness or objective function are considered, and dynamic performance of modified fitness function is compared with conventional type of objective function. It is also compared that both PI and PID controllers using MOL algorithm better than PI-based CPSO algorithm in two-area system in the presence of governor dead-band [16].
2 System Model
2.1 Two-Area System
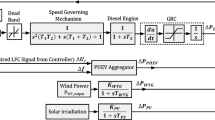
Figure 1 is the simulation model of interconnected system in the presence of governor dead-band with two non-reheat thermal power plant. The purposed model can be designed by using relevant parameters taken as per appendix. In the purpose system by considering a governor dead-band which affect the simulation performance of oscillation of purposed system and the transfer function taken in the above system as per the per the reference [16].

Interconnected two-area system in the presence of governor dead-band
The PI and PID controllers are taken for the given two-area interconnected power system for stability performance analysis. The structures of the PI and PID controllers having gain (KP, KI and KD) are considered as
The PI/PID controller (KP, KD and KP, KI, KD) in the purposed system is same (both area-1 and -2), so that it can be taken as in the controllers \(K_{P1} = K_{P2} = K_{P}\), \(K_{I1} = K_{I2} = K_{I}\) and \(K_{D1} = K_{D2} = K_{D}\). The area-1 having AEC1 (error control in area-1) is the input of controller taken as Eq. (2)
The area-2 having area controller error (AEC2) is taken as in Eq. (3)
The u1 and u2 are the output of controller (area-1 and -2). In PI controller (\(K_{D1} = K_{D2} = 0\)), the control inputs are attained as:
2.2 Objective Function
The ISE (J1), ISTE (J2) and modified objective function (J3) are considered for the purpose analysis of frequency variation of two-area power system and variation of tie-line power. The above fitness function (J1, J2, J3) is used to minimized the fitness value as
TS is the summation of power deviation and the settling times of frequency; ω1 to ω5 are weighting factors. The weighting factor in the process of optimization is taken as ω1 = 10,000, ω2 = 1000, ω3 = 50, ω4 = 70 and ω5 = 0.1.
The purpose of fitness function (J1, J2, J3) minimized the value subjected to minimum to maximum value of controller parameters. The purpose system with controllers of PI/PID taken the same value of both areas. So that KP1 = KP2 = KP, KI1 = KI2 = KI and KDF1 = KD2 = KD, where Δf1, Δf2 and ΔPtie, are the variation in frequency in area-1 and -2 and variation of tie-line power.
3 Many Optimizing Liasisons (MOL) Algorithm
The purpose algorithm is the shorten form of PSO algorithm. In PSO algorithm, all the positions of particles are move randomly in the search space direction [14]. The best position can be obtained by each particles changing the direction in the search space locality to move the next best position in the reference of fitness measures \(f:{\Re }^{n} \to {\Re }\). The initial velocity of the particle and position of particle is updated iteratively randomly in the search space. The updating velocity of particle is taken as per reference article [15]. The position \(\vec{X} \in R^{n}\) and velocity \(\vec{V}\) be the velocity of a particle.
In Eq.(9), w be the inertia weight that can control the velocity of particle. \(\vec{P}\) and \(\vec{G}\) are the global better positions of particle and swarm having weighted by the random variables \(R_{P} ,R_{G} \sim U\left( {0,1} \right)\). \(\varPhi_{P} \varPhi_{G}\) are the parameters which depend on behavioural parameters. In the search space, the new position is obtained by the merger of current position and velocity of the particles
The particle is transferred in one step from one search space to another after updating the position of particles. The purpose algorithm velocity of particle updated randomly but in case of CPSO algorithm abrupt change of velocity and a craziness factor changes the direction. In the MOL algorithm, the best position of swarms \(\vec{P}\) is removed by setting \(\varPhi_{P}\) = 0 and the update velocity as follows:
where \(w\) is inertia weight and \(R_{G} \sim U\left( {0,1} \right)\) is stochastic nature algorithm and \(\varPhi_{G}\) is behavioural parameters. The \(\vec{X}\) is the current position of particle and updated using Eq. (10) as before. The best known position of overall swarms is \(\vec{G}\).
4 Results and Discussion
The dynamic performances analysis is comparing in the three cases of objective function with disturbance which is considering in the area-1 and area-2 of the purpose system. Case-1: ISE objective function by considering disturbances is taken separately (area-1, area-2). Case-2: ISTE objective function by considering disturbance is taken separately (both area-1 and -2). Case-3: Modified objective function by considering disturbances is taken separately (area-1, area-2). The minimum of 15–20 time to run optimization till to get global value of parameters. Table 1 shows the best value of controller parameters obtained in the process, and Table 2 shows the ISE objective function with settling times. Table 3 is ISE, ITSE, ITAE, IAE and settling times with proposed objective function
Case-1: ISE objective function
Case-2: ISTE objective function
Case-3: Proposed objective function.
The 1% of step greater in demand given at time = 0 s in the area-1 and area-2 separately for the above cases in different types of objective function is considered. For the case-1 ISE fitness function variation of frequency and variation of tie-line power for the area-1 and area-2 in Figs. 2a, b, 3, 4a, b, the simulation result performance of purpose PI controller is superior than PI base craziness PSO design controller of the same system. However, the settling time of PID controller is superior than PI of MOL- and CPSO-based algorithm of the power system. Similarly for the case-2, ISTE objective function simulation result performance of MOL-based PI is superior of CPSO-based PI controller in the result as shown in Figs. 5a, b, 6a, b, 7. In the case-3 modified objective function of purposed area of interconnected system, the settling time of PID controller is better than PI-based MOL and CPSO algorithm of the same system. It is also discussed that the simulation result of PI-based purposed system of frequency variation and tie-line power deviation is superior than PI controller with CPSO based on the same system as shown in Figs. 8a, b, 9a, b, 10.

a, b Frequency changes of the area-1 due to disturbance in area-1 and change in frequency of the area-1 by virtue of perturbation in area-2, respectively

a, b Frequency changes of the area-2 due to disturbance in area-1 and frequency changes of the area-2 by virtue of perturbation in area-2, respectively

Tie-line power changes of the area-1 by virtue of perturbation in area-1

a, b Frequency changes of the area-1 due to disturbances in area-1 and Frequency changes of the area-1 by virtue of perturbation in area-2, respectively

a, b Frequency changes of the area-2 by virtue of disturbance in area-1 and Frequency changes of the area-2 due to disturbance in area-2, respectively

Tie-line power changes of area-1 by virtue of perturbation in area-2

a, b Frequency changes of the area-1 due to perturbation in area-1 and Frequency changes of the area-1 by virtue of disturbance in area-2, respectively

a, b Frequency changes of the area-2 by virtue of perturbation in area-1 and frequency changes of the area-2 by virtue of disturbances in area-2, respectively

Tie-line power changes of area-1 by virtue of disturbance in area-2
5 Conclusion
This analysis shows that MOL-based design and performance of PI and PID controllers of interconnected two areas of AGC in the presence of governor dead-band. The selection of objective function is important for finding out of optimization controller parameters. The ISE and ISTE two types conventional objective function is considered in the purposed analysis than modified objective function considered by using ISE, ISTE, IAE, IATE and sum of frequency variation of settling time and tie-line power (Ts) with appropriate weights. The dynamic performance of modified objective function is better than ISE and ISTE objective function of the same system. It is also observed that PI controller of purpose system is better than PI based CPSO based PI controller.
References
Elgerd OL (2001) Electric energy systems theory—an introduction. McGraw Hill Co., New York
Elgerd OI, Fosha CE (1970) Optimum megawatt-frequency control of multi-area electric energy systems. IEEE Trans PAS PAS-89(4):556–563
Rerkpreedapong D, Hasanovic A, Feliachi A (2003) Robust load frequency control using genetic algorithms and linear matrix inequalities. IEEE Trans Power Syst 18(2):855–861
Yang TC, Cimen H, Zhu QM (1998) Decentralized load frequency controller design based on structured singular values. IEE Proc-Generat Trans Distrib 145(1):7–14
Kundur P (1994) Power system stability and control. Mc-Grall Hill, New York
Ghosal SP (2003) Multi-area frequency and tie-line power flow control with fuzzy logic based integral gain scheduling. J Inst Electr Eng 84:135–141
Ghosal SP (2004) Application of GA/GA-SA based fuzzy automatic generation control of a multi-area thermal generating system. Electr Power Syst Res 70(2):115–127
Kothari ML, Nanda J, Kothari DP, Das D (1989) Discrete-mode automatic generation control of a two-area reheat thermal system with new area control error. IEEE Trans Power Syst 4(2):730–738
Venkateswarlu K, Mahalanabis AK (1978) Load frequency control using output feedback. J Inst Eng (Ind), pt. El-4 58:200–203
Pothiya S, Ngamroo I, Runggeratigul S, Tantaswadi P (2006) Design of optimal fuzzy logic based PI controller using multiple Tabu Search algorithms for load frequency control. Int J Contr Autom Syst 4(2):155–164
Chaturvedi DK, Satsangi PS, Kalra PK (1999) Load frequency control: a generalized neural network approach. Intl J Electr Power Energy Syst 21:405–415
Çam E, Kocaarslan I (2005) Fuzzy logic controller in interconnected electrical power systems for load-frequency control. Int J Electr Power Energy Syst 27(8):542–549
Panda G, Panda S Ardil C (2012) Automatic generation control of interconnected power system with generation rate constraints by hybrid neuro fuzzy approach. Int J Electr Comput Electr Commun Eng 6(4)
Kennedy J, Eberhart RC (1995) Particles swarm optimization. In: Proceedings of the IEEE international conference on neural networks, Perth Australia, pp 1942–1948
Shi Y, Eberhat R (1998) A modified swarm optimizer. In: Proceedings of the IEEE international conference on evolutionary computation, Anchorange
Gozde H, Taplamacioglu MC (2011) Automatic generation control application with craziness based particle swarm optimization in a thermal power system. Int J Electr Power Energy Syst 33:8–16
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
The parameter is taken of purposed two areas with governer dead-band as: TPS1 = TPS2 = 20 s, B1 = 0.045 p.u., MW/Hz, B2 = 0.045 p.u., MW/Hz, R1 = 2 Hz/p.u., R2 = 2.4 Hz/p.u., KPS1 = KPS2 = 120 Hz/p.u., MW, T12 = 0.545 p.u., a12 = −1, TG1 = 0.08 s, TG2 = 0.08 s, TT1 = 0 .3 s, TT2 = 0.3 s.
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Pabitra, M.D., Mohapatra, S.K., Baliarsingh, A., Das, R. (2021). Application of PID Controller-Based Automatic Generation Control for Interconnected Power System with Governor Dead-Band Non-linearity Using MOL Algorithm. In: Mahapatra, S., Shahbaz, M., Vaccaro, A., Emilia Balas, V. (eds) Advances in Energy Technology. Advances in Sustainability Science and Technology. Springer, Singapore. https://doi.org/10.1007/978-981-15-8700-9_3
Download citation
DOI: https://doi.org/10.1007/978-981-15-8700-9_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-8699-6
Online ISBN: 978-981-15-8700-9
eBook Packages: EnergyEnergy (R0)