
Abstract
This paper investigates a permanent magnet synchronous generator (PMSG)-based wind energy conversion system (WECS) evaluating various conditions of power flow. The variable parameter reweighted zero-attracting least mean square (VP-RZA-LMS) algorithm is applied to the voltage source inverter (VSI) to account for a variety of power quality problems like compensation of reactive power, power balancing and active power transfer. A Simulink model is developed to validate the same. The proposed control algorithm provides faster convergence speed and is also dependent on a relatively lesser number of parameters.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Wind energy conversion system (WECS)
- Permanent magnet synchronous generator (PMSG)
- Power quality
- Least mean square (LMS)
- Power electronics
1 Introduction
Over the years, the topic of energy crisis has hogged the limelight partly due to the ever-increasing demand of electrical energy and partly due to the rapid extinction of non-renewable energy sources. The swell in pollution levels due to the exploitation of non-renewable energy sources coupled with the surge in the prices of traditional energy sources has compelled researchers to look for viable alternatives. Sustainable energy sources, viz solar and wind, are an option in remote areas [1,2,3,4] where the cost of electricity by traditional means is a costly affair.
Although different types of generators with multiple converter topologies have been mentioned in the literature [5, 6], it has not been possible to completely penetrate the renewable energy sector yet. However, with proper government support in the form of national schemes and subsidies along with the advancement in power electronics [7], an effort is being made to take the renewable energy generation to the next level. The constant speed wind turbines use permanent magnet synchronous generators (PMSGs) to deliver power at a constant frequency. The advantage that a PMSG [8,9,10,11] generator provides over a regular induction generator is that there is no need of external excitation, and it is easier to control. Besides, it provides higher efficiency and reliability as well as its size is considerably small. Also, speed control is not required that is quite a task for variable speed wind turbines [12,13,14].
A lot of control algorithms have been devised for robust and reliable switching of the voltage source inverter (VSI) [15]. In this paper, the least mean square (LMS) algorithm is improved upon by including powerful adaptive filtering methods for system identification. Till date, several algorithms based on LMS have been proposed like proportionate normalized LMS (PNLMS), zero-attracting LMS (ZA-LMS) and resized zero-attracting LMS (RZA-LMS) [16]. Whereas the former repeatedly adjusts the step size that varies in accordance with the filter coefficient by updating it independently, the latter introduces variable step size strategy as the name suggests. Though ZA-LMS and RZA-LMS perform marginally better than LMS in varied situations, they are relatively tricky to implement because adjusting the step size is not easy.
In this paper, a permanent magnet brushless direct current (PMBLDC)-based wind energy conversion system (WECS) is suggested with a seamless variable parameter ZA-LMS (VP-ZA-LMS) control of VSI. The PMBLDC generator transforms the mechanical energy of wind into electrical energy which is fed to a diode bridge rectifier (DBR) for conversion from AC to DC. This power is fed at the DC bus of the converter by incorporating a boost converter that carries out the tracing of supremum power (MPPT). The advantages of the proposed control algorithm are:
-
It provides faster convergence speed.
-
This algorithm depends on lesser number of parameters that do not affect the system performance.
The proposed grid-tied WECS is simulated in MATLAB environment.
2 System Topology
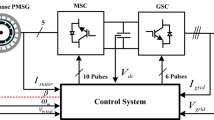
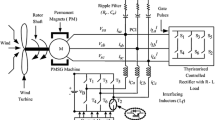
A WECS is pictorially represented in Fig. 1. It consists of a wind turbine, PMSG machine and a DBR that is coupled to a converter. The wind energy source is connected at the DC bus of the converter to maintain a constant DC bus voltage. The wind turbine is coupled to a PMSG generator whose output is fed to a DBR. The DC power thus obtained is input to a boost converter that is responsible for MPPT. The system is operated in such a way so as to trace continuously its supremum point of power for maximum efficiency. For improvement of power quality and to account for harmonic suppressions, interfacing inductances and RC filter are connected at the point of common coupling (PCC).

System topology
3 Modeling and Design of WECS
Different components that comprise a WECS are a wind turbine, PMSG machine and a DBR that is coupled to a converter. The modeling of these components is described in this section.
3.1 Mathematical Model of Wind Turbine
The mechanical energy produced from wind is a function of wind speed [2]. It is given as
where \(\rho \) = air density, v = wind speed (m/s), A = area swept by the rotor, \(C_{p}\) = power coefficient, \(\beta \) = pitch angle and R = rotor radius. The wind turbine torque is given as
The largest value of \(C_{p}\) is \(C_{p{\text {max}}} = 0.48\) and is obtained for pitch angle = 0 and \(\uplambda \) = 8.1 so that the power extracted is maximum and is given by
3.2 Modeling of PMSG
A PMSG machine of power rating 3.7 kW with the winding resistance of stator as \(R_{st}\), stator flux (\(\psi _{fsd}\), \(\psi _{fsq}\)), direct and quadrature axis stator inductances as (\(L_{sd}\), \(L_{sq}\)), PM flux linkage as \(\psi _{pm}\), n number of pole pairs and dq axis voltages and currents of stator as \(V_{sdq}\), \(i_{sdq}\) coupled with a 10 kW wind turbine comprises a WECS. The mathematical equations are expressed as [14]
3.3 Boost Converter Calculations
The duty cycle (D) and the values of capacitor and inductor of the boost converter are calculated as [15]:
where \(f_{s}\) is 10 kHz, \(V_{\text {in}}\) is the voltage input to boost converter, \(V_{\text {out}}\) is the equivalent DC bus voltage and \(\delta \)V is the acceptable voltage distortion content chosen as 1–2% of \(V_{\text {out}}\).
3.4 Design of VSC
A three-legged VSC that is meant for compensating reactive power in the system comprises six IGBTs, three AC inductors and a DC capacitor. It is designed for a 415 V, 50 Hz system [15].
3.5 Design of Interfacing Inductance and RC Filter
An RC filter is used to refine the voltage at the point of common coupling (PCC) by draining out noise from it. Considering \(R_{f}C_{f}= T_s/10\) and switching frequency equal to 2 kHz, the specifications of ripple filter are calculated as \(R_{f}=10\) \(\varOmega \) and \(C_{f} = 10 \,\upmu \)F, where \(R_{f}\), \(C_{f}\) are the resistance and capacitance of the ripple filter and \(T_{s}\) is the switching time [15]. The value of interfacing inductance is taken as 5.5 mH [15].
3.6 Scheme of DC Link Capacitor and DC Bus Voltage
DC link capacitance is calculated as [15]
where \(V_{DC}\) is the reference DC voltage and \(V_{DC1}\) is the minimum voltage level of the DC bus, m is the overloading factor, V is the phase voltage, I is the phase current and t is the time by which the DC bus voltage is to be recovered. The value of DC link capacitance thus calculated is 10,000 \(\upmu \)F.
The least value of DC bus voltage needs to be higher than two times the phase voltage peak. It is calculated as
where p is the modulation index=1 and VLL is the line to line output voltage. \(V_{DC}\) thus obtained is 677.7 V for a line voltage of 415 V and is rounded off as 700V.
4 Control Algorithm
The system is handled by regulating the DC current of the circuit in such a way such that the point corresponding to supremum power (MPP) is traced continuously. The control algorithm consists of wind control and VSC control which are mentioned in the following section.
4.1 Wind Generator Boost Converter Control
The control, shown in Fig. 2, uses a PI controller which reduces the error between the desired current and the actual DC current to zero and in the process draws out maximum generator power. The PI controller input is an error signal that is generated as
The boost converter utilizes this error signal input to a PI controller to control the output DC current and power.

Wind MPPT control algorithm
4.2 Control Algorithm for VSC
In this paper, a VP-RZA-LMS algorithm [16] as shown in Fig. 3 is proposed where the parameters like step size are repeatedly adjusted. This method keeps on minimizing the mean square error (MSE) and converges relatively faster. The simulation results further validate the performance of the algorithm. Initially, the unit template components are calculated as [15]:
Voltage at PCC is given by
Next, the corresponding error is obtained by utilizing the unit templates as shown in
The RZA-LMS update is obtained by using stochastic subgradient iterations and is given by
where the absolute value operator is applied in an element-wise manner and \(\epsilon \) is a small positive parameter. The parameter \(w_{n}\) is initialized as \(w_{n}=0.01\).
The active weight components for the three phases are estimated by subtracting \(w_{n}\) from the above equation and subsequently substituting (18) in it. The active weight components are given by equations (20), (21) and (22)

Proposed control algorithm for VSC
Adding Eqs. (20), (21) and (22), the mean value of the fundamental active component is given as
The reference supply currents for the three phases are calculated as
5 System Performance
The proposed system consists of a 10 kW wind turbine that is coupled to a 3.7 kW PMSG machine. The output is fed to a bridge rectifier via a boost converter. The VSC feeds power to linear/nonlinear loads. The source voltage is 415 V at 50 Hz. The system is operated under steady-state and dynamic conditions by varying wind speed and incorporating load unbalancing conditions. A Simulink model is designed to validate the results in detail.
5.1 Steady-State Performance Under Nonlinear Load
The conduct of a grid-tied WECS evaluated on the application of a nonlinear load is shown in Fig. 4. It shows the waveforms of source voltage \(v_{abc}\), source current \(i_{abc}\), load current \(i_{Labc}\), converter current \(i_{vsc}\), DC bus voltage \(v_{DC}\), wind velocity \(v_{\text {wind}}\), wind current \(i_{\text {wind}}\) and wind power \(p_{\text {wind}}\). It is clear that when the load current (2 A) is less than the converter current (5 A), the wind source supplies power to both load as well as grid. However, when the load current exceeds the converter current, the grid supplies power to both load as well as the wind source.

Steady-state performance under nonlinear load when \(i_{\text {load}}\) is less than \(i_{vsc}\)
5.2 Steady-State Performance Under Linear Load
Figure. 5 shows the behavior of a grid-tied WECS evaluated on the application of a linear load. It depicts the waveforms of source voltage \(v_{abc}\), source current \(i_{abc}\), load current \(i_{Labc}\), converter current \(i_{vsc}\), DC bus voltage \(v_{DC}\), wind velocity \(v_{\text {wind}}\), wind current \(i_{\text {wind}}\) and wind power \(p_{\text {wind}}\).
Figure 5a depicts that when the load current is less than the converter current, wind supplies power to both load and grid. However, when the load current is greater than converter current as shown in Fig. 5b, grid supplies power to both load and wind energy source.

a Steady-state performance under linear load when \(i_{\text {load}}\) is less than \(i_{vsc}\), b steady-state performance under linear load when \(i_{\text {load}}\) is greater than \(i_{vsc}\)
5.3 Dynamic Performance Under Nonlinear Load
Figure 6 shows the behavior of a grid-tied WECS evaluated on the application of a nonlinear load. It depicts the waveforms of source voltage \(v_{abc}\), source current \(i_{abc}\), load current \(i_{Labc}\), converter current \(i_{vsc}\), DC bus voltage \(v_{DC}\), wind velocity \(v_{{\text {wind}}}\), wind current \(i_{{\text {wind}}}\) and wind power \(p_{{\text {wind}}}\). It is observed that at time \(t= 0.5\) s, phase B of the load is reconnected to the system, but grid current remains sinusoidal and balanced. It is also observed that DC link voltage is maintained close to reference value under all disturbances.

Dynamic performance under a nonlinear load
5.4 Dynamic Performance Under Nonlinear Load Due to Change in Wind speed
The dynamic performance under a nonlinear load due to change in wind speed is shown in Fig. 7. It shows the waveforms of source voltage \(v_{abc}\), source current \(i_{abc}\), load current \(i_{Labc}\), converter current \(i_{vsc}\), DC bus voltage \(v_{DC}\), wind velocity \(v_{\text {wind}}\), wind current \(i_{\text {wind}}\), wind power \(p_{\text {wind}}\), wind speed \(v \,{(m/s)}\), rotor speed \(v_{r}\) and torque \(T_{m}\). It is observed from the figure that wind power is close to 3400 W at a wind speed of 12 m/s, and wind source supplies power to the load. However, at \(t=0.5\) s to \(t=1\) s, when the wind speed is reduced from 12 to 7 m/s, it is observed that the wind power reduces from 3400 to 1500 W. Under such conditions, the wind source is unable to supply power to the load which is evident from the waveforms of Fig. 7. Under such conditions, grid supplies power to the load.

Dynamic performance under nonlinear load due to wind speed variation
6 Conclusions
The performance of a grid-integrated WECS has been carried out in SIMULINK. The PMSG transforms the mechanical energy of the wind into electrical energy which has been rectified and conditioned and finally fed to the grid. Adaptive control of WECS is incorporated by implementing VP-RZA-LMS algorithm to provide power quality solutions like power balancing, active power transfer and voltage regulation. Also, favorable results have been obtained under changing wind speeds. Such a setup is very much capable of providing an able backup in remote locations.
References
Pimentel D (2008) Biofuels, solar and wind as renewable energy system-benefits and risks. Springer, Colorado
Wu B, Lang Y, Zargari N, Kouro S (2011) Power conversion and control of wind energy systems, Wiley, Inc., Hoboken, New Jersey
Rashid A, Hasan N, Parvez KT, Maruf (2015) MNI Study and analysis of a small-scale microgrid using renewable energy resources. In: Proceedings of international conference on electrical engineering and information communication technology (ICEEICT). Dhaka, pp 1–4
Lasseter RH (2011) Smart distribution: coupled microgrids. Proc IEEE 99(6):10/4-1082
Yahia H, Liouane N, Dhifaoui R (2014) Differential evolution method based output power optimisation of switched reluctance generator for wind turbine applications. IET Renew Power Gener 8(7):795–806 September
Rezaei E, Ebrahimi M, Tabesh A Control of DFIG wind power generators in unbalanced microgrids based on instantaneous power theory. IEEE Trans Smart Grid PP(99):1–8
Mulholland R, McBride V, Vial C, O’Malley A, Bennett D (2015) 2015 top markets report renewable energy. http://www.trade.gov/industry
Sun L, Gong C, Han F (2013) Design and optimization of control parameters based on directdrive permanent magnet synchronous generator for wind power system. In: Proceedings in 8th IEEE conference on industrial electronics and applications (ICIEA). VIC, Melbourne, pp 1238–1243
Haque ME, Muttaqi KM, Negnevitsky M (2008) Control of a stand alone variable speed wind turbine with a permanent magnet synchronous generator. In: Proceedings in IEEE power and energy society general meeting—conversion and delivery of electrical energy in the 21st century. Pittsburgh, PA, pp 1–9
Pradhan S, Murshid S, Singh B, Panigrahi BK (2018) A robust SMOC for vector controlled PMSG based isolated wind energy generating system. In: IEEE industry applications society annual meeting (IAS). Portland, OR, pp 1–8
Pradhan S, Singh B, Panigrahi BK, Murshid S (2019) A composite sliding mode controller for wind power extraction in remotely located solar PV-wind hybrid system. IEEE Trans Ind Electron 66(7):5321–5331 July
Singh B, Panigrahi BK, Pathak G (2016) Control of wind-solar microgrid for rural electrification. In: IEEE 7th Power India international conference (PIICON). Bikaner, pp 1–5
Mishra S, Hussain I, Pathak G, Singh B (2018) dPLL-based control of a hybrid wind–solar grid connected inverter in the distribution system. IET Power Electron 11(5):952–960
Pathak G, Singh B, Panigrahi BK, Chandra A, Al-Haddad K (2016)Wind-PV based microgrid and its synchronization with utility grid. In: 2016 IEEE international conference on power electronics, drives and energy systems (PEDES). Trivandrum, pp 1–6
Singh B, Chandra A, Al-Haddad K (2014) Power quality: problems and mitigation techniques. Wiley
Jin D, Chen J, Richard C, Chen Jingdong (2018) Model driven online parameter adjustment for zero attracting LMS. Signal Process 152:373–383
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
Wind Turbine: Cut in wind speed = 6 m/s, rated wind speed = 12 m/s, \(C_{p{\text {max}}} = 0.48\), \(\uplambda _{TSR} = 8.1\), \(C_{1} = 0.5175\), \(C_{2}=116\), \(C_{3}=0.4\), \(C_{4}=5\), \(C_{5}=21\), \(C_{6}=0.0069\), |
PMSG Rating: 5 hp, 230 V, n = 4, \(R_{s}\) = 1.785 \(\varOmega \), Stator Phase Inductance = 9.065 mH |
System Parameters: Boost converter inductance, \(L_{b}=10\) mH, DC link capacitance, \(C_{dc}=10,000\, \upmu {\text {F}} \), \(K_{p}=1\), \(K_{i}=0\), \(V_{dc}=700\) V, Adaptive filter constant, \(\mu _{n}=0.01\), \(\rho _{n}=0.006\), \(\epsilon =0.002\). |
Interfacing inductance, \(L_{int}=5\) mH, 3 phase grid voltage, \(V_{abc}=415\) V (rms), \(R_{f}=10\) \(\varOmega \), \(C_{f}=10 \,\upmu {\text {F}}\), Sampling time, \(T_{s}=10 \,\upmu \)s. |
Rights and permissions
Copyright information
© 2021 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Nazir, M., Hussain, I., Ahmad, A. (2021). Improved Adaptive Control Algorithm of a Grid-Connected PMSG-Based Wind Energy Conversion System. In: Favorskaya, M.N., Mekhilef, S., Pandey, R.K., Singh, N. (eds) Innovations in Electrical and Electronic Engineering. Lecture Notes in Electrical Engineering, vol 661. Springer, Singapore. https://doi.org/10.1007/978-981-15-4692-1_13
Download citation
DOI: https://doi.org/10.1007/978-981-15-4692-1_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4691-4
Online ISBN: 978-981-15-4692-1
eBook Packages: EnergyEnergy (R0)