
Abstract
Deep generative models such as GAN and Unet have achieved significant progress over classic methods in several computer vision tasks like super-resolution and segmentation. However, such learning-based methods lack robustness and interpretability, which limits their applications in real-world situations. In this chapter, we discuss a robust way for image enhancement that can combine a number of interpretable techniques through deep reinforcement learning. We first present some background about image enhancement. Then we formulate the image enhancement as a pipeline modeled by MDP. Finally, we show how to implement an agent on this MDP with PPO algorithm. The experimental environment is constructed by a real-world dataset that contains 5000 photographs with both the raw images and adjusted versions by experts. Codes are available at: https://github.com/deep-reinforcement-learning-book/Chapter14-Robust-Image-Enhancement.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Image Enhancement
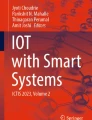
Image enhancement belongs to image processing techniques. Its principal objective is to make the processed images more suitable for the needs of various applications. Typical image enhancement techniques contain denoising, deblurring, and brightness improvement. Real-world images always need multiple image enhancement techniques. Figure 14.1 shows an enhancement pipeline that consists of brightness improvements and denoising. Professional photo editing software, such as Adobe Photoshop, allows powerful image retouching but is not efficient and requires expertise in photo editing for users. In large-scale situations like recommendation systems, the subjective quality of images is vital for user experience, where an automatic image enhancement method that satisfies effectiveness, robustness, and efficiency is needed. In particular, robustness is the most important condition, especially in user-generated content platforms, e.g., Facebook and Twitter, even if 1% of enhancement results are bad it will hurt millions of users.

An example of image enhancement pipeline. The raw image in the left is underexposed with JPEG compression noise
Unlike image classification or segmentation that has a unique ground truth, the training data of image enhancement relies on human experts. As a result, no large-scale public dataset for image enhancement is available. Classical methods are mainly based on gamma correction and histogram equalization that enhance the image with the help of prior expert knowledge. These methods do not require a large amount of data either. Gamma correction takes advantage of nonlinearity in human perception such as our capacity to perceive light and color (Poynton 2012). Histogram equalization achieves the idea that allows areas of lower local contrast to gain a higher contrast for better distribution on the pixel histogram, which is useful when backgrounds and foregrounds are both bright or both dark such as X-ray images. Although these methods are fast and simple, the lack of consideration of contextual information limits their performance.
Recently, learning-based methods, which try to approximate the mapping from the input image to the desired pixel values with CNN, have achieved great success (Bychkovsky et al. 2011; Ulyanov et al. 2018; Kupyn et al. 2018; Wang et al. 2019). However, such methods are not without issues. First of all, it is hard to train a comprehensive neural network that can handle multiple enhancement situations. Besides, pixel-to-pixel mapping lacks robustness, e.g., it does not perform very well when dealing with some detailed information such as hair and characters (Zhang et al. 2019; Nataraj et al. 2019). Some researchers have proposed to apply deep reinforcement learning to image enhancement by formulating the enhancement procedure as a sequence of iterative decision-making problems to address the challenges above (Yu et al. 2018; Park et al. 2018; Furuta et al. 2019). In this chapter, we follow these methods and propose a new MDP formulation for image enhancement. We demonstrate our approach on a dataset containing 5000 pairs of images with code examples, for providing a quick hands-on learning process.
Before discussing the algorithm, we introduce two Python libraries Pillow (Clark 2015) and scikit-image (Van der Walt et al. 2014) that provide a number of friendly interfaces to implement image enhancement. One can install them directly from PyPI as follows:

Here is an example code for contrast adjustment by Pillow’s sub-module ImageEnhance.

2 Reinforcement Learning for Robust Processing
When applying reinforcement learning to image enhancement, one needs to first consider how to construct an MDP in this domain. An idea that naturally emerges is to consider processing pixels to be states and different image enhancement technologies to be actions in the context of reinforcement learning. This formulation provides a combination method of several controllable primary enhancers to achieve robust and effective results. In this section, we discuss such a reinforcement learning-based color enhancement method. For simplicity, we only take global enhancement actions. Note that it is natural to adapt to general enhancement algorithms by adding region proposal modules (Ren et al. 2015).
Suppose that the training dataset contains N pairs of RGB images \(\{(l_i, h_i)\}_{i=1}^{N}\) where l i is the low-quality raw image and h i is the high-quality retouched image. In order to maintain the data distribution, the initial state S 0 should be sampled from \(\{l_i\}_{i=1}^{N}\) uniformly. In each step, the agent takes a predefined action such as contrast adjustment with a certain factor and then applies it to the current state. Note that the current state and selected action fully determine the transition, i.e., no environment uncertainty exists. Following previous works (Park et al. 2018; Furuta et al. 2019), we use the improvement on CIELAB color space as the transition reward function:
where h is the corresponding high-quality image of S 0 and L maps images from RGB color space to CIELAB color space.
Another important thing is the terminal condition during learning and evaluation. Unlike reinforcement learning applications on games where the terminal state can be determined by the environment, agents in image enhancement need to decide an exit time by themselves. Park et al. (2018) proposed a DQN-based agent that exits when all predicted Q-values are negative. However, the overestimation problem of function approximation in Q-learning might lead to less robust results during inference. We address this issue by training an explicit policy and adding a “NO-OP” action to represent the exit choice. Table 14.1 lists all predefined actions, where the action with index 0 represents “NO-OP.”
Training a convolutional neural network from scratch needs a large amount of retouched image pairs. Instead of using raw image states as observations, we consider the activation of the last convolutional layer in ResNet50 pre-trained on the ILSVRC classification dataset (Russakovsky et al. 2015), which is a significant deep feature that improves many other visual recognition tasks (Ren et al. 2016; Redmon et al. 2016). Inspired by previous work (Park et al. 2018; Lee et al. 2005), we further consider the histogram information when constructing observations. Specifically, we calculate the histogram statistics of the state in RGB color space over ranges (0, 255), (0, 255), (0, 255), and CIELAB color space over ranges (0, 100), (−60, 60), (−60, 60). These three features are concatenated as 2048 + 2000 dimensional observations. We select PPO (Schulman et al. 2017) as the policy optimization algorithm. PPO is an actor-critic method that achieves significant results on a number of tasks. The network consists of three parts: three-layers feature extractor serving as a backbone, one-layer actor, and one-layer critic. All layers are fully connected, where the outputs of the layers in feature extractor are 2048, 512, and 128 units with ReLU activation, respectively.
We evaluated our method on the MIT-Adobe FiveK (Bychkovsky et al. 2011) dataset including 5000 raw images, each with five retouched images produced by different experts (A/B/C/D/E). Following previous work (Park et al. 2018; Wang et al. 2019), we only use the retouched images by Expert C, which randomly selected 4500 images for training and the rest 500 images for testing. The raw images are DNG format while the retouched images are TIFF format. We convert all of them to JPEG format with quality 100 and color space sRGB by Adobe Lightroom. For efficient training, we resized images such that the maximal side consists of 512 pixels for each image. Hyper-parameters are provided in Table 14.2.
From now on, we demonstrate how to implement the algorithm above. First of all, we need to construct an environment object.

With the ResNet API from TensorFlow, we build the observation by function _state_feature as follows:

Then we define the transition function _transit following Table 14.2, and implement reward function _reward with Eq. (14.1), to construct same interfaces as OpenAI Gym (Brockman et al. 2016):

In contrast to the implementation in Sect. 5.10.6, we apply the PPO (Schulman et al. 2017) algorithm in the discrete case. Note that we use LogSoftmax as the activation function in the actor network, which provides better numerical stability when calculating the surrogate objective. For the PPO agent, we first define its initialization and act function:

During sampling, we record the trajectories with the GAE (Schulman et al. 2015) algorithm

Finally, the optimization part is provided as follows:

where the value loss clipping and advantage normalization are followed by Dhariwal et al. (2017). Figure 14.2 shows an example result.

An example result of global enhancement on the MIT-Adobe FiveK dataset. The global brightness is increased while some areas like sky in the upper right corner need local enhancement
References
Brockman G, Cheung V, Pettersson L, Schneider J, Schulman J, Tang J, Zaremba W (2016) OpenAI gym. Preprint. arXiv:160601540
Bychkovsky V, Paris S, Chan E, Durand F (2011) Learning photographic global tonal adjustment with a database of input/output image pairs. In: Conference on computer vision and pattern recognition 2011. IEEE, Piscataway, pp 97–104
Clark A (2015) Pillow (PIL fork) documentation. https://github.com/python-pillow/Pillow
Dhariwal P, Hesse C, Klimov O, Nichol A, Plappert M, Radford A, Schulman J, Sidor S, Wu Y, Zhokhov P (2017) OpenAI baselines. GitHub, GitHub repository
Furuta R, Inoue N, Yamasaki T (2019) Fully convolutional network with multi-step reinforcement learning for image processing. In: Proceedings of the AAAI conference on artificial intelligence, vol 33, pp 3598–3605
Kupyn O, Budzan V, Mykhailych M, Mishkin D, Matas J (2018) DeblurGAN: Blind motion deblurring using conditional adversarial networks. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 8183–8192
Lee S, Xin J, Westland S (2005) Evaluation of image similarity by histogram intersection. Color research & application: endorsed by inter-society color council, the colour group (Great Britain), Canadian society for color, color science association of Japan, Dutch society for the study of color, the Swedish colour centre foundation, colour society of Australia, centre. Français de la Couleur 30(4):265–274
Nataraj L, Mohammed TM, Manjunath B, Chandrasekaran S, Flenner A, Bappy JH, Roy-Chowdhury AK (2019) Detecting GAN generated fake images using co-occurrence matrices. J Electron Imaging 2019:532-1
Park J, Lee JY, Yoo D, So Kweon I (2018) Distort-and-recover: color enhancement using deep reinforcement learning. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 5928–5936
Poynton C (2012) Digital video and HD: algorithms and interfaces. Elsevier, Amsterdam
Redmon J, Divvala S, Girshick R, Farhadi A (2016) You only look once: unified, real-time object detection. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 779–788
Ren S, He K, Girshick R, Sun J (2015) Faster R-CNN: towards real-time object detection with region proposal networks. In: Advances in neural information processing systems, pp 91–99
Ren S, He K, Girshick R, Zhang X, Sun J (2016) Object detection networks on convolutional feature maps. IEEE Trans Pattern Anal Mach Intell 39(7):1476–1481
Russakovsky O, Deng J, Su H, Krause J, Satheesh S, Ma S, Huang Z, Karpathy A, Khosla A, Bernstein M (2015) ImageNet large scale visual recognition challenge. Int J Comput Vision 115(3):211–252
Schulman J, Moritz P, Levine S, Jordan M, Abbeel P (2015) High-dimensional continuous control using generalized advantage estimation. Preprint. arXiv:150602438
Schulman J, Wolski F, Dhariwal P, Radford A, Klimov O (2017) Proximal policy optimization algorithms. Preprint. arXiv:170706347
Ulyanov D, Vedaldi A, Lempitsky V (2018) Deep image prior. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 9446–9454
Van der Walt S, Schönberger JL, Nunez-Iglesias J, Boulogne F, Warner JD, Yager N, Gouillart E, Yu T (2014) Scikit-image: image processing in python. PeerJ 2:e453
Wang R, Zhang Q, Fu CW, Shen X, Zheng WS, Jia J (2019) Underexposed photo enhancement using deep illumination estimation. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 6849–6857
Yu K, Dong C, Lin L, Change Loy C (2018) Crafting a toolchain for image restoration by deep reinforcement learning. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 2443–2452
Zhang S, Zhen A, Stevenson RL (2019) GAN based image deblurring using dark channel prior. Preprint. arXiv:190300107
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Huang, Y. (2020). Robust Image Enhancement. In: Dong, H., Ding, Z., Zhang, S. (eds) Deep Reinforcement Learning. Springer, Singapore. https://doi.org/10.1007/978-981-15-4095-0_14
Download citation
DOI: https://doi.org/10.1007/978-981-15-4095-0_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4094-3
Online ISBN: 978-981-15-4095-0
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)