
Abstract
Nowadays foreground segmentations are becoming more complex in videos and images while capturing at distinct backgrounds. In this work, we addressed the multimode background suppression in video change detection, where it has many challenges to handle like illumination changes, different backgrounds, camera jitter and moving cameras. The framework contains different inventive systems in background modeling, displaying, order of pixels and use of separate shading spaces. This framework firstly allows numerous background scene models that are pursued by an underlying foreground/background used to estimate the probability for each pixel. Next, the image pixels are merged to form megapixels which are used to spatially denoise the underlying probability assessments to generate paired shading spaces for both RGB and YCbCr. The veils formed during the processing of these information pictures are then merged to separate the foreground pixels from the background. A comprehensive assessment of the suggested methodology on freely available test arrangements from either the CDnet or the ESI dataset indexes shows prevalence in the implementation of our model over other models.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Foreground segmentation
- Video change detection
- Computer vision
- Background modeling
- Background subtraction
- Color shading spaces
- Pixel classifiers
1 Introduction
Background subtraction (BS) is a standout topic, which has gained wide interest in computer vision perspective. It is a important step in advance video preprocessing and has various applications including video surveillance, movement checking, detection human body, motion acknowledgment and so forth. BS method typically generates a foreground (FG) binary mask for a given input picture and a background (BG) model. BS has become difficult task due to the account of the assorted variety of scenes foundation and the progressions started in the camera itself. Scene varieties can be in numerous structures, for example, dynamic foundation, brightening changes, irregular question movement, shadows, features, cover and in addition a large number of natural conditions like snowfall and daylight change. Moreover, these progressions are because of camera-related and sensor problems.
Current BS frameworks can solve few of these problems and a substantial segment of them are unanswered because of the diversity in background of the picture, camera development and ecological circumstances. Most of the methodologies developed till now unable handle all the key challenges simultaneously with good performance. So we presented a BS system which produces better results for variety of issues faced while processing the picture. This method uses Background Model Bank (BMB) which contains various BG models. To isolate FG pixels from changing BG pixels induced by scene or camera variation itself, we use megapixel (MP) spatial denoising for estimating the pixel probability of different color spaces in order to produce various FG masks, These FG masks then were used together to produce a final FG mask.
The prime contribution to this study is a universal BG subtraction system called multimode background subtraction (MBS) with many significant innovations like MP spatial denoising of measures, Background Model Bank (BMB), the combination of several binary masks and multi-color spaces for BS. Feasibility study findings of using similar model to manage changes in lighting and camera movement were discussed in [1] and [2], respectively. Enhancements to this work include:
-
A thorough assessment of the fusion of suitable color spaces for BS.
-
A new update mechanism for a model.
-
A new MP spatial denoise based and a dynamic selection system that considerably decreases the variety of variables and computing nature.
Background subtraction is very much investigated area in computer vision perspective, so we illustrate MBS efficiency by offering a extensive comparison with 15 other cutting edge BS algorithms on a collection of freely accessible difficult sequences across over 12 distinct classifications, totaling to 56 video sets. To maintain a strategic distance from inclination in our assessments, we have embraced indistinguishable arrangements of measurements from prescribed by the CDnet 2014 [3]. The broad assessment of our framework shows better FG segmentation and prevalence of our framework in examination with existing best in class approaches.
The paper is organized as follows: Literature work is presented in Sect. 2. Proposed work is discussed in Sect. 3. Algorithm used in the work and its implementation is discussed in Sect. 4. Section 5 presents discussion of the results. Finally Sect. 6 concludes the work.
2 Literature Review
The author Ghobadi et al. presented how the complexity of 2-D/3-D pictures is eliminated simply by means of characterizing a quantity of intrigue, its utilization for hand detection and also for signals recognition. Harville et al. related the standard technique of basis demonstrating by means of Gaussian blends for shading and profundity recordings.
They use complete measured intensity images, so that there is no gripping object to deal with the numerous resolutions. Bianchi et al. reported a rather straightforward way to address vanguard area for 2D/3D images that relies upon on locale growing and shuns screening, though in Leens et al. a primary pixel-based totally basis demonstrating approach referred to as visual background extractor (ViBe) is applied for shading and profundity measurements independently. The following frontal face covering is blended with the assistance of paired image sports, for example, disintegration and widening. An extra targeted method for melding, shading and profundity is—sided by isolating the input, which is applied. Crabb et al. explained how preparatory leading edge is added by way of a separating aircraft in area and a reciprocal channel is attached to pick up the remaining consequences. The method is shown on profundity expanded alpha tangling, which is moreover the focus by Wang et al.
Schuon et al. presented the potential of two-side isolation for manipulating geometric gadgets. The difficulty of combining the profundity and shading measurements and taking care of their different nature is also examined throughout profundity upscaling. To that give up a fee capacity or volume is characterized by Yang et al. that portrays the fee of in principle every viable refinement of the profundity for a shading pixel. Again a respective channel is connected to this extent and after sub-pixel refinement a proposed profundity is picked up. The development is completed iteratively to perform the last profundity outline. The consolidation of a second see is moreover mentioned.
Bartczak and Koch discussed a similar method utilizing duplicate views. An approach running with one shading picture and several profundity snapshots is portrayed by Rajagopalan et al. Here the data mixture is described in a real manner and validated using Markov Random Fields on which a power minimization strategy is attached. Another propelled approach to join profundity and shading information is by Lindner et al. It relies upon nerve-racking safeguarding biquadratic upscaling and plays out an unusual treatment of invalid profundity estimations below refinements of the profundity for a shading pixel. Again a reciprocal channel is hooked up to this volume and after sub-pixel refinement a proposed profundity is picked up. The advancement is achieved iteratively to accomplish the closing profundity delineate. The consolidation of a second see is likewise examined.
R. H. Evangelio presents element Gaussians in blend display (SGMM) for foundation extraction. Gaussian blend fashions widely utilized as part of the space of reconnaissance. Because of low memory necessity, this model applied as part of the non-stop software. Split and union calculation gives the association if primary mode extends and that reasons weaker movement trouble. SGMM represents criteria of willpower of modes for the example of basis subtraction. SGMM gives better foundation fashions as far as low dealing with time and low memory stipulations; for that reason it’s miles undertaking reconnaissance location.
L. Maddalena and A. Pestrosino addressed the self-organizing background subtraction (SOBS) for discovery of moving images in view of neural foundation display. Such model produces self-sorting out model naturally with out in advance studying approximately covered example. This flexible model basis extraction with scene containing constant enlightenment range, transferring foundations and conceal can include into shifting article with basis display shadows cast and accomplishes recognition of various varieties of video taken via desk bound camera. The presentation of spatial rationality out of spotlight display refresh techniques activates the SC-SOBS calculation that offers inspire vigor toward false popularity. L. Maddalena and A. Pestrosino talk approximately large exploratory results of SOBS and SC-SOBS in mild of development place challenges.
A. Morde, X. Ma, S. Guler discussed an idea about for traffic spot. Change place or frontal area and foundation department has been extensively utilized as a part of picture managing and PC imaginative and prescient, as it’s miles important increase for disposing of motion facts from video outlines. Chebyshev’s likelihood disparity-based totally foundation shows a strong regular basis/frontal area department approach. Such version upheld with fringe and repetitive motion identifiers. The framework utilizes identification of moving item shadows and complaints from extra multiplied quantity protest following and question grouping to refine the further division precision. In this method show-off, exploratory final results on great sort of test recordings show approach superior with camera jitter, dynamic foundations, and heat video and additionally forged shadows. Pixel-based adaptive segmenter (PBAS) is one of the strategies for recognizing shifting article within the video define using basis division with complaint.
Martin Hofmann, Philipp Tiefenbacher and Gerhard Rigoll communicate the unconventional approach for recognition of protest, i.e., for frontal vicinity division. This versatile division machine takes after a non-parametric basis displaying worldview and the foundation is composed by way of as of late watched pixel history. The choice part plays a vital in pixel-based totally versatile department for taking closer view preference. In this method, studying the model used to refresh foundation of the question. The learning parameter provides dynamic controllers for each considered pixel region and attribute it to be dynamic. Segmented adaptive based pixel is ideal in the techniques of refinement.
3 Proposed Method
Subtraction of background mainly classified into five-advance process: preprocessing, modeling of background, preface detection, validation of data and update of model. Preprocessing includes straight forward video processing on input video, such as converting formats and resizing images for subsequent steps. The modeling of the background is accountable for the creation of a statistical scene model followed by the pixel classification in the first phase of foreground recognition step. In this step, false detected preliminary pixels are eliminated in the data verification, forming the final phase foreground mask [4]. The last stage is if required to update the model. The last advance is to refresh the models if important. Our developments principally fall in the utilization of various color specs, background model relying on process of background modeling, formation of MP and foreground label correction, and new model update procedures. We outline every one of these developments in the following sections.
-
A.
BS with many color spaces
For the precise segmentation of the foreground, the selection of color space is critical. For background subtraction, numerous color spaces have been used including RGB, YCbCr, HSV, HSI, Lab2000 and normalized-RGB (rgb). HSV, HSI, are utilized for foundation subtracting. Among of these color spaces, we consider the top four since these are broadly utilized color spaces: HSV, RGB, YCbCr, HSI. For several reasons, RGB is a reliable option:
-
Luminosity and color statistics are equally scattered in every one of the three color channels.
-
Powerful against both ecological and camera motion [5].
-
It is most cameras’ output format and its direct BS utilization prevents color conversion calculation costs [2].
The utilization of another color spaces: HSI, YCbCr and HSV are inspired from visual system of humankind. Characterizing color observation in HVS is that it has a tendency for assigning out reliable color even under varying illumination over a quite a few time or gap. The color spaces isolate the luminosity and color data in YCbCr coordinate direction and though HSI and HSV on polar directions. As color consistency influences BS to act stronger against brightness alterations, shadow and features. Comparative color space studies [6] have demonstrated that YCbCr outperforms the colors RGB, HSI and HSV and is regarded as the most appropriate color space to foreground segmentation [7].
Because of its autonomous color channels, YCbCr is minimal insubstantial to noise, brightness variations and shadow. RGB is found to be succeeding after HSV or HSI at the base as their mapping coordinates are very inclined to camera motion [1]. Moving from RGB to YCbCr saves hardware and software cost compared to HSV or HSI. In brightness of the correlation, YCbCr acts as a decision for division. Be that as it may, [4]. On the basis of the comparison above, YCbCr offers a natural segmentation option. But earlier techniques do recognize possible issues with YCbCr color space [8,9,10]. If the present picture includes very dark pixels, the likelihood of error rises as dark pixels are near the origin of RGB space. Similar circumstances do not happen exactly when illumination is less, yet moreover occurs when part of the image ends in darkness. It is customary in indoors with complex scene dimensions and light sources. Object’s shadow is one such case were prohibitive usage of YCbCr in such condition realizes a decrease in precision.
In view of computer vision, two color spaces YCbCr and RGB are used to manage illumination conditions. Then we select the channels suitable for the given scene. The difference is that all channels and only one color are used in all current methods. Under poor light environment, Y and RGB channels are used because color information which is spread transversely and Y use the channels (Cr and Cb) of YCbCr to assemble foreground region division accuracy. In the midst of direct lighting conditions, both above color spaces supplement one another in giving an effective FG or BG classification.
To justify the various color spaces, a point by point quantitative examination is displayed in segment by differentiating division accuracy across more than 12 particular arrangements using each color space autonomously, two color spaces together, and by with dynamic picking of color channels.
-
B.
To Model a Background
BG modeling is the basic step in BS procedure and the Model’s efficiency and accuracy effects the segmentation. Many BG models use either a version of a statistical background model that is multimodal in the pixel sense. Such a strategy has two issues: First, the amount of methods used to model the distribution of pixel probability is hard to determine. Secondly, the dependencies between pixels are ignored and result in bad segmentation.
Recollecting the genuine goal of the BG, we put forward Background Model Bank (BMB), to incorporate various background models. In creating BMB, every BG image is overseen as a background model up with picked color channel merged to form a vector [11, 12]. The vital parts of background models are then joined into various common BG models utilizing an iterative consecutive sequential clustering framework. Two background average models (p and q alive and well) to measure more detectable than estimated corr_th are then combined. The measurement can be calculated by
This procedure proceeds repetitively unless there are not any normal background models with Corr > corr_th. Utilization of frame level cluster overcomes limitations of dimensions of scene. Normally genuine (real life) scenes consist of various kinds of objects. The diversity in settings and relationships between various kinds of subjects and items produces very complex and infinite geometry in the scene. Illustrations incorporate varieties as a result of sudden variations in light and shake in the camera. This assorted variety makes it hard to precisely catch and model the scene.
Utilization of various background models enables us to capture a scene more correctly. Other preferred standpoint of BMB is that it is mathematically easier than other ways. Only one Model is selected from BMB and rest is left. The experimental data illustrates how various background models could capture scene precisely. Contrasting with more unpredictable multi-modular, this approach gets equivalent or high-quality outcomes, with the use of simple binary classifier for the arrangement of pixels, which makes the application effective.
-
C.
Double Categorization
In this section, for each color channel chosen, we address the generation of binary masks. The process carried out in four steps: Activation/disabling of the color channel, probability estimate of pixel level, MP preparation and estimate of mean probability. Figure 1 shows the design process of the binary mask.

Block diagram of proposed binary classification and mask generation
-
(1)
Color Channels Activation/disabling:
In this progression, activate or deactivate color channels like Cb and Cr. The two channels are used if the average intensity of input data image is larger than specifically chosen parameter channel_th, otherwise for the most part they are not used. In the event that the information of image strength is more significant than the decided parameter channel_th then one channel otherwise we can utilize both color channels.
-
(2)
Estimation of Pixel-Level Probability:
Pixel wise error, error D(X) is calculated in each of color channel YCbCr and RGB and based on the values, we chose one BG model.
where D implies the color channel under test, ID(X) is the input image data, and μDn (X) is the mean of BG model. Initially, we determine the error for the individual pixel, then we calculate a initial probabilities Ip of all pixels by subjecting through a sigmoid function.
This method of analysis behind this transform is that the larger the error, the more probability that the pixel belongs FG.
-
(3)
Formation of Megapixel:
The aim of this step is to demonstrate spatial denoising by considering ip estimates and color data information of the surrounding pixels within the Super-Pixels (SP). SPs give advantages, when it comes to capture the local context and reduce computational level of complexity substantially. These algorithms merge nearby pixels into a single pixel based on a measure of resemblance. The graph partitioning problem is used for formulating SP segmentation. The goal for a graph G = (V, E) and M of the SPs is to locate a subset of the edges A ⊆ E to estimate a graph G = (V, A) with at least M sub-graphs connected. There are two elements of the clustering objective function: entropy rate H in a random direction and balance term.
where NA is the quantity of associated parts in G. A substantial entropy is related to smaller and similar groups, though the adjusting term empowers compact with relative clusters. To improve over segmentation, SPs are consolidated to frame substantially greater MPs utilizing density-based spatial clustering for applications with noise clustering (DBSCAN).
DBSCAN clustering algorithms are based on density and clusters are characterized as denser areas, while the sparse areas are considered as outliers or boundaries to separate clusters. Two SP are combined to megapixels (MP) with below-mentioned criteria:
For any two neighboring SPs, distance range function depends on average lab color deviation and is characterized as:
-
(4)
Labeling and Estimation of Average Probability:
Next stage is to find mean probability of a MP y, denoted as AP y, with a sum of Y pixels: In the following stage we are figuring the normal probability of
np represents pixel index and ip is the elemental estimated probability of BG/FG of all pixels. The Average Probability (AP) is allocated to all pixels that belongs megapixel. To get Binary Mask Dmask (X) for every colored D, the AP is rounded with use of empirically estimated parameter threshold prob_th. Usage of MP and its specific AP empower us to assign out a mean probability to each pixel having a place with a comparable inquiry and in this way fabricates the segmentation accurateness.
For example, each one of the pixels that belong to the road in Fig. 2 is supposed to be BG. obviously, in Fig. 2, as we move from left to right, pixels of road having incorrect calculation of probability estimates the center out using neighboring pixels by methods SPs or MP, in like manner upgrading the segmentation precision.

Correlation of segmentation with mean probability measurement of every pixel, normal movement mean probability estimation (center) based on SP, and normal movement probability estimation based on MP (right)
The normal probability of a MP addresses a comparative inquiry for every pixel or SPs. Model update is indeed an important element for an algorithm to address scene modifications over time. After several frames or time periods, the classical method of model updates is to replace older values well into the model with newer ones. Such processes for upgrading can be a problem because the update frequency is difficult to be determined.
For instance, a man sitting at rest in a scene may be part of a BG if update frequency is fast. Another situation could be baggage that is forgotten, during which issue arises as to whether it would ever become a background or be a part of background? Two issues should be addressed through an update system. First, is updating the model necessary? Secondly, what is the update frequency? We contend that a shift rate of the FG pixels can help activate the update of the model and set an adequate update rate. The amount of FG pixels in a typical supervision scene fluctuates comparatively slightly and substantial changes can lead to a departure from the conventional BG model.
where th is a precisely chosen parameter that suggests an adequately essential change in support of model update. The rate of change is figured in perspective of the departure of the amount of foreground pixels in present packaging from the average. Formally, we describe it as:
where Ot(X) represents the o/p binary mask at moment of t for a given current i/p image.
Upon triggering the model update system and calculating the rate of change, the update feature f can be used to plot the pace of transition to identify the suitable change rate U and define it as:
To know the need of an update rate feature f, we need to know first how and what sort of modifications inside a scene can actually occur. BG changes can be made at various rates from slow to abrupt. The gradual light shift from the beginning of sunrise to end of sunset shows that a slowly evolving BG needs a slow update rate. There can be startling changes caused by sudden light changes in domestic conditions or camera related problems.
Unable to choose a reasonable update rate can become conscious over to the number of false positives. Therefore, it is essential to determine the correct update rate for altering BG dynamically. The choice of the update rate feature f from easy linear functions to complicated features is distinct. Two applicants are a simple or nonlinear function based on the ease and efficiency of parameters.
An immediate limit gives an unmistakable direct link between advance rate and rate of update. An exponential limit is used for greater sensitivity. This limit can suit to adjust during unexpected change in light. So we used a less complex function:
where m = slope and 0 < m<1. For instance, when m = 0.25 and rate of advance = 1, the processed revive rate would be 0.25, implies less weightage to old BG and more weightage to present one. After selecting the update rate, a model is then revived as takes after:
where an It (X) address current data diagram at time t and (μn (X)) is the picked BG appear for current edge and is being updated.
The dynamic model update framework grants to give provisions to various circumstances in which standard approaches make an impact. For example, no model revive will be associated when there is no FG in the scene or FG is not changing as the rate of advance is close to zero.
Eventually, at whatever point there is a change in BG, it can continuously choose revive rate and a while later update BG appear efficiently.
Because of the randomly generated initial starting points, K-means algorithm is, however, hard to reach the global optimum; instead, it produces one of the local minimum, leading to improper clustering results. Barakbah and Helen performed that the error ratio of K-means is more than 60% for well-separated datasets. To prevent this, we use our prior work for the optimization of initial clusters for K-means with pillar algorithms. The Pillar algorithm is very robust and superior for optimizing initial centroid for K-means by placing all centroids far apart in the data distribution.
4 Algorithm Development
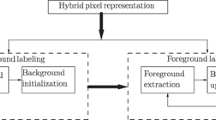
In this sub-section, we outline how individual works are grouped in our structure. The proposed structure includes five phases which is showed in Fig. 3. Each and every stage is explained below.

Universal multimode subtraction system
-
Stage 1: Selecting the Background Model
The first stage will be to choose the suitable BG model for the incoming image and to define the model BG in the BMB which enhances the correlation with that of input image I(X):
-
Stage 2: Generation of Binary Mask (BM)
Here, the information picture and the picked BG exhibit are utilized to evaluate a initial probability of each pixel. The input information image is passed with same time as MP module, which partitions the image in individual number of MPs. Avg probability estimates will be computed for every MP utilizing pixel-level probability estimates and from there thresholded to produce binary masks (BM) for every color channel. We demonstrate the BM for color channel D as Dmask (X).
-
Stage3: Binary Masks Aggregation/Fusion
The BMs will then be used to create foreground detection (FGD) masks for color spaces RGB and YCbCr. For the color of YCbCr, the FG DY YCbCr mask will be decreased only to Y channel BM if Cb and Cr channels are disabled. Finally, both FGD masks are merged to obtain the actual FGD mask with a logical AND between distended versions.
-
Stage 4: Purging of Binary Masks
The FGD mask is implemented in step 3 is applied to the individual BMs. This eliminates all the erroneous foreground areas and improves consistency in the final phase in the classification of FG and BG pixels.
-
Stage 5: Foreground Mask
In the last stage of the method, FG mask is derived from the logical OR of all the Dmask new (X) masks.






6 Conclusion
In this paper, we proposed a method where we can segment the foreground and background and we can improve the efficiency. To do this, the pixel-level comparison is done and probabilities are estimated by which spatial denoising occurs. Based on the illumination conditions, low light vision, RGB and Y color channels bright light CbCr are used to get the foreground segmentation. In this, we are using K-means method by using pillars algorithm. K-means algorithm gives more compatible results compare with DBSCAN clustering due to the large size of data and small number of variables. However, K-means algorithm gives accurate results when we are using large dataset. In shadow suppression and in moving camera categories, Mbs will give the better performance results. And the proposed method implementation is done by using the MATLAB software. And in the future, we can develop by using the C and C++ algorithms.
References
H. Sajid, S. C. S. Cheung, Foundation subtraction underneath unexpected brightening change. In Proceedings of IEEE Multimedia Signal Process (MMSP) (Sep. 2014), pp. 1–6
H. Sajid, S.- C. S. Cheung, Foundation subtraction for static moving digital camera. In Proceedings of International Conference on Picture Process, (Sep. 2015), pp. 4530–4534
Y. Wang, P. -M. Jodoin, F. Porikli, J. Konrad, Y. Benezeth, P. Ishwar, CDnet 2014: An prolonged trade region benchmark dataset. In Proceedings of Computer Vision Example Recognition Workshops (CVPRW), 387–394 2014
S. C. S. Ching, C. Kamath, Strong structures for basis subtraction in urban rush hour gridlock video. In Proceedings of Electron Image,(2004), pp. 881–892
Change popularity Dataset, got to on [Online] Accessible 15 Dec. 2016: https://www.Changedetection.Internet
L. P. Vosters, C. Shan, T. Gritti, Background subtraction beneath sudden illumination changes. In Proceedings of AVSS, (Sep. 2010), pp. 384–391
S. Brutzer, B. Hoferlin, G. Heidemann, Evaluation of historical past subtraction techniques for video surveillance. In Proceedings of CVPR, (Jun. 2011), pp. 1937–1944
K. Toyama, J. Krumm, B. Brumitt, B. Meyers, Introvert: Principles and habitual on the subject of basis help. In Proceedings of ICCV, pp. 255–261 Sep. 1999
T. Bouwmans, Recent superior statistical background modeling for foreground detection—A systematic survey. Recent. Pats Comput. Sci. 4(3), 147–176 (2011)
C. Stauffer, W. E. L. Grimson, Adaptive heritage mixture fashions for real-time monitoring. In CVPR, (1999)
A. Elgammal, D. Harwood, L. Davis, Non-parametric model for heritage subtraction. In Proceedings of ECCV, (2000), pp. 751–767
P.D.Z. Varcheie, M. Sills-Lavoie, G.-A. Bilodeau, A multiscale location-primarily based motion detection and background subtraction algorithm. Sensors 10(2), 1041–1061 (2010)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Raju, V., Suresh, E., Kranthi Kumar, G. (2020). Foreground Segmentation Using Multimode Background Subtraction in Real-Time Perspective. In: Saini, H.S., Singh, R.K., Tariq Beg, M., Sahambi, J.S. (eds) Innovations in Electronics and Communication Engineering. Lecture Notes in Networks and Systems, vol 107. Springer, Singapore. https://doi.org/10.1007/978-981-15-3172-9_56
Download citation
DOI: https://doi.org/10.1007/978-981-15-3172-9_56
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-3171-2
Online ISBN: 978-981-15-3172-9
eBook Packages: EngineeringEngineering (R0)