
Abstract
Unmanned aerial vehicles are extensively exploited for diverse applications importantly surveillance, reconnaissance, defense, and military. Development of unmanned amphibious vehicle with integrating features of multirotor and hovercraft principles to navigate along and above water body, land surface, and also flying in the air is a challenging task. This article presents a conceptual design of amphibious vehicle for the payload capacity of 7 kg with an endurance of 20 min and provision for mounting water sampler to collect water samples in remote water bodies. Finite element analysis (FEA) is performed to evaluate the structural strength characteristics of each part of the amphibious vehicle, and the integrity of the structure is analyzed. FEA results indicated that the designed amphibious vehicle structure is well within the stress limit and the minimal displacement is obtained. Materials for various parts of vehicles are determined through structural analysis, and the overall amphibious structure is analyzed with a due consideration of lift carrying capacity, payload, battery, and other electronic module weights.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
24.1 Introduction
Unmanned aerial vehicles (UAVs) are classified with reference to body shape and size are fixed, flapping and rotary wings [1]. These UAVs made a vivid impact in multifaceted applications including environmental monitoring, search and rescue, bridge inspection, traffic monitoring, mapping of mines, wildlife surveying, precision agriculture, etc. [2]. Design and development of aerial vehicles with diverse payload capacity and an ability to perform necessary missions pertaining to specific applications are in the rise. There are few research works on the development of amphibious vehicles [3,4,5,6,7,8]; the design of hovercraft systems [9,10,11,12,13,14] and many works have been carried out on the development of quadrotor systems. However, the usage of UAVs in water quality monitoring and collection of water samples in remote water bodies are scarce. Especially, the design of amphibian characteristics UAVs can fly, land, and glide along the water surface imposing a lot of challenges in terms of control in flight transition, selection of materials, propulsion, energy consumption, and payload capacity. In addition, other factors such as durability, reliability, safety, and minimal cost are utmost important for industrial demand and customer requirement. There are few floating UAVs which have been developed and commercialized in the market. However, integrating the characteristics of multirotor and hovercraft systems is not being explored in the literature. These vehicles are aimed to cover large areas of water bodies in a short span of time. Unlike other floating vehicles, due to the principle of hovercraft, the friction between the vehicle and water surface is avoided and thereby a huge amount of energy is saved. The vertical takeoff and landing ability of vehicle can position the vehicle in precise water locations across rivers, ponds, and other water bodies to collect water samples. Designing amphibious vehicle with sufficient strength characteristics to withstand lift conditions and carrying necessary payload are considered to be challenging. In this work, an amphibious model is developed to carry a payload of 7 kg. Finite element analysis is performed for UAV frame, hull, skirt, and amphibious structure through varying the materials to examine the structural strength and integrity of the structure.
24.2 Conceptual Model of Amphibious Vehicle
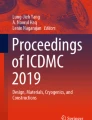
Amphibious model is conceptualized through integrating the principles of quadcopter and hovercraft as shown in Fig. 24.1. The basic H-UAV frame is used to act as quadrotor, and at the four corners, lightweight motors and propellers are assembled to generate sufficient thrust force to lift the entire vehicle. The lifting capacity can be increased by providing coaxial propellers so that payload carrying capacity may be increased. At the middle of the vehicle, a water sampler mechanism is placed, and at the rear, a duct fan is positioned to achieve directional control while in hovercraft mode. The batteries, electronic accessories, flight controllers, and other electrical elements are appropriately distributed to balance the center of gravity of the vehicle.

Conceptualized model of amphibious vehicle
24.3 Finite Element Analysis of Amphibious Parts and Integrated Structure
In order to determine the suitable material for each amphibious part, structural analysis is performed through varying the materials. They are selected with respect to high strength-to-weight ratio, manufacturability, low cost, and also its availability.
24.3.1 Quadrotor Frame
The quadrotor frame is meshed (Fig. 24.2) with tetrahedron element having three degrees of freedom (DOF) with skewness of 0.978 and an aspect ratio of 2. The elements are maintained with maximum tetrahedron angle of 102° and length of the element is 6 mm. The generation of thrust force from each propeller of about 10 kg is applied at each corner of the motor frame; a central load of 7 kg as the payload is concentrated for payload; and batteries and other loads are distributed appropriately in the frame structure. For various materials (Table 24.1), structural analysis is carried out to determine the minimal displacement and stress. Aluminum obtained the maximum stress of 15 MPa (Fig. 24.3) and the displacement of 2.22 mm (Fig. 24.4).

Finite element model with boundary conditions

Stress contour of UAV frame-aluminum

Deformation of UAV frame-aluminum
It is also observed from Table 24.1 that carbon fiber and aluminum obtained better performance in comparison with other materials. However, with respect to cost and availability, aluminum is preferred.
24.3.2 Hull
It serves as a platform to fasten the frame of the quadrotor together and hold the electronics hub. It also incorporates all hardware units, propulsion, wireless communications, soldered circuitry, and battery. The structure is made up of wood/foam sandwich to achieve minimal weight. Finite Element Analysis (FEA) is performed for the internal hull pressure of 731 Pa, 10 kg battery weight and other loads of 1.5 kg are acting on the hull is also considered for the analysis. Simulation results indicated that maximum stress (Fig. 24.5) of 20 MPa and deformation of 0.21 mm (Fig. 24.6) are experienced at the hull structure.

Stress contour of hull

Deformation of hull
24.3.3 Skirt
The skirt is inflated during hovering mode, and it creates a cushioning effect between the vehicle and surface. An internal pressure of 731 Pa is applied along the periphery of the structure, and the static analysis is performed for diverse materials as given in Table 24.2. Due to the pressure loading, the minimal stress of 0.74 MPa (Fig. 24.7) and the displacement of 0.2 mm (Fig. 24.8) are obtained for nylon family materials.

Stress contour of skirt

Deformation of skirt
24.3.4 Integrated Structure
After integrating UAV frame, hull, and skirt for the earlier material properties and applying appropriate boundary conditions, FEA is carried out to evaluate the integrity and strength of the amphibious structure.
Static analysis results indicate that the designed structure is well within the allowable stress (Fig. 24.9) and deformation of 2 mm can be seen at the four corners due to cantilever structure (Fig. 24.10).

Stress contour of amphibious structure

Deformation of amphibious structure
The convergence of the solution is guaranteed with reference to analysis as shown in Fig. 24.11.

Convergence of solution
24.4 Conclusion
Amphibious vehicle is conceptualized for air, water, and land-borne operations to carry a payload capacity of 7 kg. Each part of an amphibious vehicle such as UAV frame, hull, and skirt is structurally evaluated with diverse material properties, and appropriate boundary conditions are considered. The following are the conclusions drawn from FEA:
-
For the UAV frame, aluminum and carbon fiber obtained minimal displacement and stress. However, aluminum is cost-effective than carbon fiber.
-
Hull material made of wood/foam sandwich structure has better load-carrying capacity to withstand the payload, weight of the battery, and other electronic modules.
-
Neoprene-coated nylon obtained minimal displacement and stress in comparison with other nylon-based material, and it can be selected for the skirt.
-
The integrated structure of quadrotor and hovercraft experienced minimal displacement and stress. Hence, the conceptualized amphibious structure can be built through these materials and it ensures the rigidity of the structure.
References
Valavanis, K.P., Vachtsevanos, G.J.: Handbook of unmanned aerial vehicles. Springer, New York (2014)
Hassanalian, M., Abdelkefi, A.: Classifications, applications, and design challenges of drones: a review. Prog. Aerosp. Sci. 91, 99–131 (2017)
Collins, K.A.: A concept of unmanned aerial vehicles in amphibious operations. Doctoral dissertation, Monterey, California. Naval Postgraduate School (1993)
Boxerbaum, A.S., Werk, P., Quinn, R.D., Vaidyanathan, R.: Design of an autonomous amphibious robot for surf zone operation: Part I mechanical design for multi-mode mobility. In Advanced Intelligent Mechatronics Proceedings, IEEE/ASME International Conference, pp. 1459–1464 (2005)
Yayla, M., Sarsilmaz, S.B., Mutlu, T., Cosgun, V., Kurtulus, B., Kurtulus, D.F., Tekinalp, O.: Dynamic stability flight tests of remote sensing measurement capable amphibious unmanned aerial vehicle. In: AIAC, 7th Ankara International Aerospace Conference, Ankara, Turkey (2013)
Pisanich, G., Morris, S.: Fielding an amphibious UAV—development, results, and lessons learned. In: Digital Avionics Systems Conference, vol. 2, 8C4-8C4 (2002)
Hasnan, K., Ab Wahab, A.: First design and testing of an unmanned three-mode vehicle. Int. J. Adv. Sci. Eng. Inf. Tech. 2(1), 13–20 (2012)
Frejek, M., Nokleby, S.: Design of a small-scale autonomous amphibious vehicle. In: Electrical and Computer Engineering, CCECE Canadian Conference, IEEE. 000781-000786 (2008)
Amyot, J.R.: Hovercraft technology, economics and applications, North Holland, 11 (2013)
Detweiler, C., Griffin, B., Roehr, H.: Omni-directional hovercraft design as a foundation for MAV education. Intelligent Robots and Systems (IROS), IEEE/RSJ, pp. 786–792 (2012)
Schleigh, J.: Construction of a hovercraft model and control of its motion. Doctoral dissertation (2006)
Rashid, A., Zamzuri, M., Aras, M., Shahrieel, M., Mohamed Kassim, A., Ibrahim, Z., Annisa, J.: Dynamic mathematical modeling and simulation study of small scale autonomous hovercraft. Int. J. Adv. Sci. Tech. 46, 95–114 (2012)
Fuller, S.B., Murray, R.M.: A hovercraft robot that uses insect-inspired visual autocorrelation for motion control in a corridor. Robotics and Biomimetics (ROBIO), pp. 1474–1481 (2011)
Amiruddin, A.K., Sapuan, S.M., Jaafar, A.A.: Development of a hovercraft prototype with an aluminium hull base. Int. J. Phys. Sci. 6, 4185–4194 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sheng, T.K., Esakki, B., Ponnambalam, A. (2020). Finite Element Analysis of Amphibian UAV Structure. In: Li, C., Chandrasekhar, U., Onwubolu, G. (eds) Advances in Engineering Design and Simulation. Lecture Notes on Multidisciplinary Industrial Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-13-8468-4_24
Download citation
DOI: https://doi.org/10.1007/978-981-13-8468-4_24
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-8467-7
Online ISBN: 978-981-13-8468-4
eBook Packages: EngineeringEngineering (R0)