
Abstract
As the inter-junction section of the mainline and the ramps, the expressway weaving area is one of the major bottlenecks within the urban expressway system. In addition to various behaviors of drivers, the acceleration lane length of expressway weaving area is generally short, which makes it more prone to trig traffic disorder and become a traffic accident blackspot. Increasing the acceleration lane length of expressway weaving area can provide larger buffer space for the merging process of vehicles. However, a longer length generally means a higher infrastructure investment. Consequently, an optimal length of acceleration lane is essential for the expressway road infrastructure development. This paper uses the empirical survey data and a microscopic simulation system, called Traffic Parallel Simulation System (TPSS), as the simulation platform to build and verify the lane-changing model in expressway weaving area. By means of the developed weaving area simulation model, the impacts of various acceleration lane length on the traffic flow service levels are investigated, for obtaining the recommended value of acceleration lane length under different levels of services. This value further provides the guidelines for traffic management departments to formulate strategies and technical supports to relieve traffic congestions.
Foundation item: Project (16ZDA048) supported by the National Social Science Foundation of China.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
As a typical facility of urban road system, expressways play an important role within traffic corridors of medium and large capacities. Due to the comparable high traffic demand, the level of services of expressway at peak hours remains inferior in many large cities (Research institute of highway ministry of transport 2000). As the inter-junction of the mainline and the ramp, the expressway weaving area is generally with a large amount of lane-changing maneuvers, and the frequent lane changing may lead to traffic disorder and deteriorated road capacity. It is also prone to trigger serious traffic congestion, especially when the mainline traffic is close to the saturation state, in which the traffic capacity of merging area is reduced, making it the major bottleneck of expressway. Consequently, it is urgent and essential to reduce the influence of the bottleneck in merging area and to improve the traffic capacity, and thus to maintain service of the entire expressway system.
Expressway merging area generally consists of three components: the ramp, mainline, the acceleration lane, and the mainline (Ministry of Transport of the People’s Republic of China 2006). The acceleration lane directly determines the duration for vehicles to complete the lane-changing maneuver. It is an important parameter affecting the combined flow operation characteristics. At present, studies on the length design for the acceleration lane are based on literatures (Shao 2001) formulating the aspect of statistical probability of vehicles entering into highway on the acceleration lane and obtaining a practical model to determine the length of the acceleration lane. Zhao (2004) formulated the ramp capacity of the main line under different traffic volumes and established a probability model in which the on-ramp vehicles could directly merge under different traffic loads on the main road. The study also provided the setting rules of the acceleration lane length under certain ramp traffic probability and the traffic volume of the main road served. Zhi (2009) formulated the probability of vehicle convergence on the acceleration lane. The designed expressway lane length was optimized based on the traffic flow of the main highway, the acceleration lane, and the minimum time headway. In this way, traffic flow control model of the entrance ramp was established. Yang (2015) formulated a model that include most of the existing studies on acceleration characteristics. However, this model does not fully represent the realistic traffic conditions or are based on outdated data. This study investigated the actual acceleration characteristics at metered on-ramps according to field data collection and analysis. Accordingly, the distance-acceleration profiles of various ramp configurations were determined. Yang (2016) developed a method for determining acceleration lengths at the metered on-ramps. They built a range-velocity profile for each ramp and developed regression models to predict the required acceleration length at a given merging speed.
In recent decades, with the rapid development of computer simulation and intelligent transportation technologies, traffic simulation was introduced to analyze the operating characteristics of expressway weaving area, which has facilitated the emerge of various simulation packages. A number of microscopic traffic simulation models have been developed, including VISSIM (Schneeberger 2003), AIMSUN (Barceló et al. 1998), PARAMICS (Lu et al. 2010), MITSIM (Yang and Koutsopoulos 1996), CORSIM (ITT Industries 1999) and SITRAS (Hidas 2002), and so on. However, as the construction basis of such simulation models are in accordance with the unique vehicle, roads, drivers and other traffic flow features in different countries, it does not necessarily match China’s road traffic characteristics (Sun et al. 2013). In addition, the factors of the models, such as closure, specificity, and exclusiveness, result in inadequate application scope of such models. In the studies, there has been little simulation research on traffic operation in weaving area in China. Therefore, this paper uses a microscopic traffic simulation package TPSS, jointly developed by Shanghai Jiao Tong University and Jilin University as the simulation platform, to implement lane-changing model in weaving area for the development of a simulation system. The system is developed using Visual C++ programming language.
The simulation model of weaving area was introduced to analyze the influence of different acceleration lane lengths on the traffic flow service level (Xiong and Wang 2016), thus to obtain the recommended value of acceleration lane length under different service levels. RMSE and MPE evaluation indices were selected to verify the validity of the model. Results of this study may provide the basis for traffic management departments to formulate further strategies and technical supports to ease traffic congestion.
The rest of the paper is organized in the following sections. Section 2 presents the major factors used in the simulation model construction in weaving area. Section 3 formulates the acceleration length model and establishes simulation experiment. Section 4 analyzes and discusses the simulation results and recommends the speed reference value of acceleration lane. Conclusions and recommendations for future work are provided in Sect. 5.
2 Simulation Model Construction
Traffic Parallel Simulation System (TPSS) is a time step based microscopic traffic simulation package (Juan 2008), simulating the dynamic characteristics of the large-scale network traffic flow. The system can be divided into three layers. The first layer is a graphic control workstation, namely, a foreground layer, composed of a large number of graphic workstations, providing a friendly and easily operating user interface. Windows operating system and Visual C++ are used to develop this layer. The main responsibilities of this layer include interface optimization and high maneuverability. This layer is not responsible for the stability and safety in the system design. The second layer consists of three components: a database server, a data center server, and a parallel computing dispatch server. The main function is to provide communication and scheduling for the frontend graph control station and the background parallel computing workstation. This layer is mainly responsible for the safety and stability of the system, and Linux is adopted instead of Windows. The third layer consists of multiple parallel computing workstations and is the background layer. The main function is to receive the commands from the second layer and execute the corresponding tasks, with the computing results of parallel workstations sending back to the second layer. This layer is also deployed on a highly safe and stable Linux operating system.
2.1 Modeling Weaving Area
In the traffic simulation network that we design, five entities are designed and included in the expressway weaving area: road section, lane, ramp, vehicle and driver. According to the object-oriented design principle (Eldredge 1990), these entities are encapsulated as classes as TLink, TLane, TRamp, TVehicle, and TDriver. Combined with the related entity attributes and call requirement, these classes that characterize expressway weaving area simulation are defined for member functions and property variables. Five vector queue structures were defined accordingly, as below.
-
(1)
TVEHICLELIST: represents the vehicle vector queue structure, used to store the class objects of all vehicle generated in the simulation network, such as the types of vehicle, displacement, speed, acceleration, as well as the front and rear clearance of lane changing, and the number of lane-changing, etc.
-
(2)
TLINKLIST: represents the section vector queue structure, used to store the class objects of all sections during the simulation network, including the basic properties of sections such as serial number, number of lanes, number of lane channelization, grade, and slope as well as the road running conditions such as flow, density, speed, delay time, etc.
-
(3)
TLANELIST: represents the lane vector queue structure, used to store the class objects of all lanes in the section, including the lane basic properties such as width, length, and control mode, as well as the lane operation conditions such as flow, speed, density, queue length, and number of stops, etc.
-
(4)
TRAMPLIST: represents the ramp vector queue structure, used to store the class objects of all ramps, including ramp type, acceleration lane length, gradient length and so on.
-
(5)
TDRIVERLIST: represents the driver vector queue structure is used for the class objects of driver’s characteristics, including the driver’s type, the normal distribution of the mean and variance, the driver’s reaction time, and the acceptable factor for the speed limit of the road, etc.
Based on the definition of these data structures, the simulation modules can share the dynamical information without affecting each other, so that the reading efficiency and speed are significantly increased during the simulation, which is especially important for large-scale network simulations.
2.2 Lane-Changing Module Design
According to the division of lane-changing maneuvers and the interactions between the mainline vehicles and the merged vehicles in expressway weaving area, the lane-changing modules are redesigned and divided into five sub modules, as follows:
Free lane change: It mimics the merged vehicles to adopt free lane changing, namely, the lane-changing behavior under light traffic flow in expressway weaving area. By computing the gap acceptance in free change situation, whether the merged vehicles can adopt free type lane change are evaluated. If the condition is satisfied, the free lane change behavior is executed. Otherwise, it is necessary to continue to judge whether the subsequent collaborative lane change and forced lane change can be performed.
Cooperative lane change: It mimics the cooperative behavior by the lag vehicles in the mainline, specifically including lane change collaboration and deceleration collaboration. This module first evaluates the probability of following vehicle to adopt change lane collaboration and deceleration collaboration. If the condition is satisfied, the collaborative lane change is performed; otherwise, the merging vehicle has to judge whether it is necessary to adopt forced lane change.
Force lane change: It mimics the forced lane change behavior by the merged vehicles. If a merged vehicle finds that the conditions for free lane change and collaborative lane change are not satisfied, it will consider whether to force the following vehicle to decelerate in order to merge into the mainline. This module evaluates the probability to adopt force lane change. If the condition is satisfied, the force lance changed will be performed, otherwise, the merging vehicle has to accelerate or stop.
Gap acceptance: It determines the feasibility for vehicle to change lanes. Before performing the lane changes, this module should be invoked to decide the probability to change lanes, including the judgement of three lane changes maneuvers, i.e. free lane change, collaborative lane change and forced lane change.
Merging-in: If the gap acceptance model satisfies the corresponding requirement, the vehicle performs the merging in maneuver.
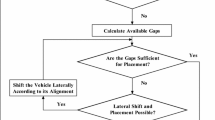
As a merging vehicle must not interfere with the mainline vehicles during the free lane change process, it first judges the free lane change after entering acceleration lane. If the condition is satisfied, the merged vehicle will perform a free lane change, and the original guiding vehicle on the mainline will be set as the front vehicle. Otherwise, the collaborative merging or forced merging will be considered. The flow chart for the lane changing module is provided (see Fig. 1).

Lane changing for the merging maneuver on expressway weaving areas.
3 Modeling Length of Acceleration Lane
3.1 Determining Service Volume
In the expressway merging area, the traffic volumes on the mainline and on ramp not only play a role in determining the characteristics of traffic flow, but also the fundamental parameters for microscopic traffic simulation. In accordance with Design Specifications of Urban Expressway (CJJ (37-2012)) (Code of design for urban and engineering 2012), the service level of expressway is generally divided into four grades, as presented in Table 1. As the urban roads are in a dense network system and the basic section is relatively shorter than the regular highway, it is necessary to apply three-grade level of services to set the design speeds of the mainline of expressway at 60 km/h, 80 km/h, 100 km/h, respectively, as in Table 2. It is easy to determine the corresponding service levels of basic sections according to different speeds. The maximum service traffic volume of the upper grade is the minimum service traffic volume of the next grade. Accordingly, the service traffic volume ranges of different speeds under the three-grade level are determined.
The identified service traffic is mainly for the ideal situation, which is necessary to be amended based on related influencing factors in field traffic situations to obtain the feasible values. Considering the influence of medium and large vehicles, the reduction coefficient of large vehicles is approximated as (Ministry of Transport of the People’s Republic of China 2006):
where,
\( f_{HV} \) — the reduction coefficient of large vehicle;
pi — the percentage of traffic volume ofitype vehicle from the total;
Ei — the reduction coefficient of itype vehicle.
The conversion coefficient is chosen as 1, for light-duty and mid-size vehicles, and 1.5 and 2 for large vehicles and articulated buses, respectively.
In accordance with a large amount of field investigation of expressway merge areas in Shanghai, China, small-type vehicles are dominant in the expressway merge areas, which accounts for 93.1% of the total traffic volume, while large-type and medium-type vehicle account for 2.3% and 4.6%, respectively. According to the conversion coefficient of different vehicle types stipulated by CJJ (37-2012), the conversion coefficient of large-type vehicles is set as 0.97, based on which the mixed traffic volume of different designed speeds can be calculated. A six-lane expressway was used as an example for the service traffic volume calculation, as most expressways in China have six lanes in both directions. On the design speed 100 km/h, the single lane volume of traffic is 1500–2000 pcu/(h·lane), and the correction factor is 0.97. Therefore, the mixed traffic volume can be approximated as 1455–1940 vehicle/(h·lane), and the overall three-lane volume is set at 4365–5820 veh/hr.
To achieve the three-grade service of the main lane of expressway, it is necessary for the traffic volume of ramp to realize three-grade service. According to CJJ (37-2012), the speed of ramp has to be designed between 30–40 km/h. The traffic capacity of ramps with different designed speeds is 1050 pcu/(h·lane) under 20 km/h, 1133pcu/(h·lane) under 30 km/h, 1196 pcu/(h·lane) under 40 km/h.
It can be determined that when the designed speed reaches 30–40 km/h, the basic traffic capacity of ramp is 1133–1196 pcu/(h·lane). As the value range of density is 0.5–0.8 below three-grade service, it was calculated that the service traffic volume of ramp is 587–956 pcu/(h·lane) for the designed speed of 40 km/h, and the service traffic volume of ramp is 573–920 pcu/(h·lane) for the designed speed of 30 km/h.
When the ramp traffic merged in, the vehicle spacing is influenced by the main lane traffic volume, so that the permissive the ramp traffic volume merging-in can be approximated based on the main lane traffic volume. In the expressway merge area, the characteristics of ramp traffic changing lanes to merge into the main lane is similar to that secondary road traffic running at no signal control intersections. Therefore, the computing method of secondary road traffic volume at no signal control intersections is used. Within the traditional distribution models describing the time headway, Erlang distribution was used to model the main lane time headway as follows.
The probability density function of Erlang distribution is:
The distribution function of Erlang distribution is shown as the following:
The mean value and variance of the distribution are as follows:
where r is the order of Erlang distribution; when r = 1 or r = ∞, Erlang distribution can be simplified as the negative exponential distribution or to produce mean time headway. It can be found that the different values of parameter r can cause different time headway distribution under different running state, which can successfully show different traffic flow characteristics (Chang et al 1998).
When the time headway of main lane traffic follows the Erlang distribution of r order, the ramp traffic capacity is estimated as follows:
where:
\( Q_{r} \) — ramp traffic volume;
\( Q_{1} \) — main lane traffic volume;
\( t_{0} \) — merging probability;
t — critical gap of ramp vehicle;
r — the order of Erlang distribution.
The ramp service traffic volume can be calculated from Eq. (7). For the mainline design speed as 100 km/h, the field service volume of traffic is approximated as 551–777 veh/hr; for the mainline design speed as 80 km/h, the field service volume of traffic is approximated as 723–880 veh/hr; for the mainline design speed as 60 km/h, the field service volume of traffic is approximated as 826–907 veh/hr.
3.2 Simulation Case Design
The basic parameters of traffic flow, road geometry and vehicle characteristics are explained as below.
3.2.1 Traffic Flow Parameters and Road Geometry
The traffic flow parameters mainly include the parameters for the mainline and ramp traffic under different designed speeds, vehicle type composition, and so on, while the road geometrical parameters include number of lanes, width of lane, length of lane and lane type. The mainline and ramp traffic for simulation model is input according to the values identified in following Sect. 4.1. The vehicle type composition is according to the investigation of nine merge are as in Shanghai, in which small-type vehicle accounts for 93.1%, while the medium and large-type vehicle account for 4.6% and 2.3%, respectively. The length of acceleration lane is set between 60–260 m to evaluate the influence of different lengths of acceleration lane on the corresponding service level (Table 3).
3.2.2 Vehicle Characteristic Parameters
The parameters for the vehicle characteristics mainly include the expected speed distribution, the acceleration and deceleration. The expected speed is important to traffic capacity and running speed. In order to reasonably calculate the traffic performance of merge area under different designed speeds and levels of service, the expected cruising speed is defined in accordance with the required values under three-grade service specified in CJJ (37-2012). Thus, the minimum and maximum expected speeds are determined. Parameters of expected speed distribution under different designed speeds are 62–76 km/h under 100 km/h design speed; 54.5–64 km/h under 80 km/h design speed; 43.5–50 km/h under 60 km/h design speed.
For further evaluation and analysis, simulation result including several indicators of traffic, speeds of different sections of merge area, and density were output. From randomness purpose, each simulation case was run three times, with the average values used.
3.3 Impact of Accelerating Lane Length
Results from different simulation cases are obtained to assess the influence of acceleration lane length on the level of service of the merge area. Considering a main lane with designed speed of 100 km/h and the ramp with designed speed of 40 km/h, the influence on the upstream of merge area, as well as the merge area were investigated.
The relation between length of acceleration lane and running speed of upstream is shown (see Fig. 2). It can be seen from that the running speed of upstream of merge area has positive correlation with the length of acceleration lane. When the length of acceleration lane increases to about 205 m, the service level of upstream of merge area increases from four-grade to three-grade (the running speed is more than 62 km/h); When the length of acceleration lane increases to larger than 210 m, the speed of upstream of merge area tends to be stable.

The running speed of upstream of merge area.
The relation between the length of acceleration lane and running speed of merge area is shown (see Fig. 3). The running speed of merge area has positive correlation with the length of acceleration lane. When the length of acceleration lane increases to about 210 m, the service level of merge area increases from four-grade (forced flow) to four-grade (saturated flow) and the running speed reaches 53 km/h. When the length of acceleration lane increases to more than 220 m, the length of acceleration lane has no effect on the increase of speed and the curve of running speed of merge area tends to a horizontal line.

The running speed of merge area.
Based on the analysis of influence of the length of acceleration lane on the upstream of merge area, as well as merge area, to guarantee the three-grade service of main lane and four-grade (saturated flow) services of the merge area, the length of acceleration lane is supposed to be no less than 220 m.
Analysis was carried out on the influence of length of acceleration lane under speed combinations of 100–30, 80–40, 80–30, 60–40, and 60–30 with the same analysis approach to identify the required minimum length of acceleration lane based on the three-grade services of the mainline and the four-grade (saturated flow) services of the merge area.
4 Result Analysis and Discussion
4.1 Model Simulation and Validation
The model is implemented and validated using the expressway weaving area of Xinzhuang expressway interchange of Shanghai (see Fig. 4). The mainline traffic flow, acceleration lane traffic flow, the proportion of vehicles, the running speed and other related data were obtained based on the video processing, as shown in Table 4. To overcome the randomness of simulation, multiple runs of simulation were carried out, with the average value of outputs used.

Simulation case output animation.
To validate the merging area simulation model, the lane change location of the merged vehicle, the lane change gap of following vehicle and other micro index were selected as the indicators, by referring to HCM2010 (Ryus et al 2010). Two evaluation indices, RMSE (Charisma 2002) and MPE (Pindyck and Rubinfeld 1997), were selected for comparing and analyzing simulation and observed values, as below:
where:
n — survey data sample;
\( M_{i}^{sim} \) — simulation value of merging location;
\( M_{i}^{obs} \) — measured value of merging location;
\( i = 1,2,3 \cdots ,n \)
Through the observation of simulation animation, the simulation model of the merge area of the expressway can well represent the complex interaction behavior between the mainline vehicles and the incoming vehicles in the merge area. Some mainline vehicles will take the way of deceleration or lane change to cooperate with the incoming vehicles to lane change and merge into the mainline. Then, the average deviation and the average percentage deviation of the two evaluations are evaluated against the simulation output and the measured data against the actual data, and the error of the estimate. The RMSE and MPE of the two indexes, e.g. the merged location, the gap of following vehicle, were obtained. The comparison and analysis of simulation and measured values were provided (see Fig. 5).

Comparison of measured and simulation values of the lane-changing position and gaps.
The result demonstrated that the average percentage deviation of the lane-changing location, the gap of following vehicle are 7.5% and 7% respectively, both within an acceptable range of 10%. In addition, the root-mean-square deviation of lane change location of merged vehicle, the lane change gap of the following vehicle was also smaller. Consequently, it can be figured out that the simulation output and the measured value have high consistency, indicating validity of the lane-changing model of expressway weaving area, which can better replicate the complex operation of the traffic flow in merging area.
4.2 Determining Length of Acceleration Lane
Based on the combination of traffic level of service and the designed speeds of mainline and ramp, the influence of the length of acceleration lane on the running state of the upstream of merge point and the merge area were assessed. The target is to keep the mainline service stays above three-grade and the merge area service stays above four-grade (saturated flow). The required minimum length of acceleration lane (single lane) is recommended as in Table 5 below.
From the comparison of the recommended minimum length of acceleration lane obtained in the simulation and the minimum value specified in CJJ (37-2012), it is found that the most designed length of acceleration lane is relatively short, as only the level of service of main lane is considered. Therefore, it is suggested that the length of the merge area should be extended in order to satisfy the requirements of levels of service for the upstream of the merge area, as well as the on-ramp merging area.
5 Conclusions and Recommendations
The length of acceleration lane in expressway merge area is essential in affecting the traffic flow characteristics in the merging area, and it plays a crucial role in determining the core content of expressway design. This paper proposed an expressway merging-in model based on the traffic volume of main line and ramp combined with the TPSS simulation system. We validated the simulation accuracy using the incorporated field data measured. RMSE and MPE indexes were calculated to indicate the reliability of simulation within certain acceptable range. Then, the reasonable values for expressway acceleration lane length were recommended, which may be observed directly from our animation when the acceleration lane length initially increases, which showed the speed of the merging area was enhanced clearly. When the length of acceleration lane attains a certain value, continuing to increase the acceleration lane length would reduce speed within the merging area. Therefore, simply increasing the acceleration lane length actually did not enhance the overall speed of the merging area, which may only significantly increase the construction costs. In future, we plan to combine the driver behavior characteristics with the facilities of expressway constructions, which can add additional optimization and ease traffic bottlenecks of urban expressway merging areas.
References
Research institute of highway ministry of transport: Transport planning and research institute, and Southeast China University. Highway Capacity Research Report, China (2000)
Ministry of Transport of the People’s Republic of China: Design Specification for Highway Alignment. China Communication Press, Beijing (2006)
Shao, C.Q., Yang, Z.H., Chen, J.C., Ren, F.T.: A probability model for length of acceleration lanes on expressway. J. Appl. Stat. Manag. 20(4), 42–45 (2001)
Zhao, C., Deng, W., Zhou, R.G., Wang, W.: The length design method for acceleration lane taking into account of traffic. J. Highw. Transp. Res. Dev. 21(8), 103–107 (2004)
Zhi, Y.F., Zhang, J., Shi, Z.K.: Research on design of expressway acceleration lane length and merging model of vehicle. China J. Highw. Transp. 22(2), 93–97 (2009)
Yang, G., Xu, H., Tian, Z., Wang, Z., Zhao, Y.: Acceleration characteristics at metered on-ramps. Transp. Res. Record J. Transp. Res. Board 2484, 1–9 (2015)
Yang, G., Tian, Z., Xu, H., Wang, Z.: Recommendations for acceleration lane length for metered on-ramps. Transp. Res. Record J. Transp. Res. Board 2588, 1–11 (2016)
Schneeberger, J.D.: Microscopic simulation model calibration and validation: a case study of VISSIM for a Coordinated Actuated Signal System. In: TRB 2003 Annual Meeting, pp. 185–192 (2002)
Barceló, J., Casas, J., Ferrer, J.L., et al.: Modelling advanced transport telematic applications with microscopic simulators: the case of AIMSUN Simulation technology, Science and Art. In: Proceedings of the 10th European Simulation Symposium, pp. 362–367 (1998)
Lu, L., Yun, T., Li, L., et al.: A comparison of phase transitions produced by PARAMICS, TransModeler, and Vissim. Intell. Transp. Syst. Mag. 2(3), 19–24 (2010). IEEE
Yang, Q., Koutsopoulos, H.N.: A microscopic traffic simulator for evaluation of dynamic traffic management systems. Transp. Res. Part C 4, 113–129 (1996)
ITT Industries: CORSIM user’s manual. Office of Safety and Traffic Operations Research and Development, pp. 1–37 (1999)
Hidas, P.: Modelling lane changing and merging in microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 10(5), 351–371 (2002)
Sun, D.J., Zhang, L.H., Chen, F.: Comparative study on simulation performances of CORSIM and VISSIM for urban street network. Simul. Model. Pract. Theory 37, 18–29 (2013)
Xiong, Q.P., Wang, G.: An automatic electrical toll collection system for highway toll stations based on public transportation cards [China National Invention Patent], Patent ID: ZL2016.20131205.8, 28.9.2016
Juan, Z.C., Tan, Y.L., Ni, A.N.: Study on microscopic traffic simulation model of public transport vehicles operation. J. Highw. Transp. Res. Dev. 25(8), 119–127 (2008)
Eldredge, D.L.: Applying the object-oriented paradigm to discrete event simulations using the C++ language. Simulation 54, 83–91 (1990)
Code of design for urban and engineering: Specification for design of urban expressway (CJJ 37-2012). China Architecture and Building Press, Beijing (2016)
Chang, Y.L., Wang, W., Cao, H.: Capacity of inferior lane at unsignalized intersection. J. Southeast Univ. 28(3), 98–102 (1998)
Ryus, P., Mark, V., Lily, E., Richard, G.D., Barbara, K.O.: Highway Capacity Manual (HCM2010). Transportation Research Board (2010)
Charisma, F.C.: Modeling Lane-changing Behavior in Presence of Exclusive Lanes. Ph.D. Dissertation, Department of Civil and Environmental Engineering, MIT, U.S. (2002)
Pindyck, R.S., Rubinfeld, D.L.: Econometric Models and Economic Forecasts, 4th edn. Irwin McGraw-Hill, Boston (1997)
Acknowledgment
The authors are thankful to the Shanxi Bei’an Fire Protection Technology Co., Ltd. for providing the necessary data and information in this study. The research was sponsored in part by the Projects (17DZ1204003, 17ZR1445500) supported by the Shanghai Science and Technology Committee (STCSM), Shanghai Municipal Government, and the Projects (201705-JD-C1085-072, 201705-JD-C1085-056) supported by the National Independent Innovation Demonstration Zone. Any opinions, findings, and conclusions or recommendations expressed in this paper are those of the authors and do not necessarily reflect the views of the sponsors.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Luo, J., Zeng, X., Chen, Y., Sun, D. (2019). Determining Acceleration Lane Length on Expressway Weaving Area Using Microscopic Traffic Simulation. In: Zeng, X., Xie, X., Sun, J., Ma, L., Chen, Y. (eds) International Symposium for Intelligent Transportation and Smart City (ITASC) 2019 Proceedings. ITASC 2019. Smart Innovation, Systems and Technologies, vol 127. Springer, Singapore. https://doi.org/10.1007/978-981-13-7542-2_2
Download citation
DOI: https://doi.org/10.1007/978-981-13-7542-2_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-7541-5
Online ISBN: 978-981-13-7542-2
eBook Packages: EngineeringEngineering (R0)