
Abstract
Ramp metering is a viable, reliable and effective strategy which maintains urban expressways in optimum status. Various forms of applications and researches on ramp metering are studied systematically by literature analysis of various countries. It can be classified into different categories according to different control objects, tasks and methods. In view of the history of ramp metering development, a review and analysis is made for the essential urban expressway ramp metering methodologies and their advantages and disadvantages in this paper, which is based on two aspects: isolated ramp metering and coordinated ramp metering. And also some perspectives on the development of ramp metering research are brought up in order to propose the tendency of further studies.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The main goal of expressway management is to increase throughout, speed, and capacity to maintain the optimum operation of expressway system. Ramp metering is most commonly expressway management strategy to control the number of vehicles entering an expressway by using traffic signal [1]. Since 1960s, various forms of researches on ramp metering have been done from fixed-time strategy to adaptive or responsive ramp metering. And lots of researches were also put into practice, and also great achievements have been made, especially traffic responsive control [2].
In order to review theses essential researches, this paper summarizes the ramp metering strategies and algorithms through three main sections. Firstly, this paper presents the ramp categories according to different control objects, means, and methods; secondly, presents a review of isolated ramp metering strategies and their evaluations which mainly developed in the earlier stage, thirdly provides a review of recent researches in coordinated ramp metering strategies, lastly, gives the conclusion and outlook.
2 Categories of Ramp Metering
The state of the ramp can be generally divided into three types: no control (ramp open), ramp metering (adjustment), and ramp closed. These three states can be converted to one another. Referring to ramp metering, it can be divided into several categories, according to the control ideas, objects, means and techniques of implementation. As for the specific method to be adopted, it should be determined in accordance with the specific tasks and the actual conditions.
The existing ramp metering strategies and methods are summarized as follows:
(1) According to different objects, it can be divided into isolated ramp metering and coordinated ramp metering; (2) According to different control means, it can be divided into fixed-time control, responsive control and adaptive control; (3) According to different control methods, it can be divided into single control and integrated control.
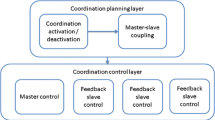
The above-mentioned strategies and methods can produce multiple combinations to form a ramp metering strategy when in practical use, as shown in Fig. 1. For example, it can combine fixed-time control with responsive control, that some of the multiple channels can be controlled by fixed-time strategy, and others can be controlled by responsive strategy.

Classification and combination strategies of ramp metering.
The essential ramp metering strategies and their relationships are shown in Table 1.
3 Isolated Ramp Metering Strategies and Algorithms
Isolated ramp metering (or local ramp metering) is a relatively simple and fundamental problem in ramp metering research. But “multum in parvo”, and its technical complexity and implementation cost are much lower than coordinated control. Moreover, in quite a lot of cases, the isolated ramp metering strategy is more effective than the coordinated strategy, so it is of important value of research.
3.1 Fixed-Time Strategies
As early as 1965, Wattleworth proposed the method of fixed-time control of the on-ramp [3]. In the absence of modern detection technology and computer technology, this method developed a ramp metering strategy based on mathematical programming theory, with the traffic capacity as constraint, and with the maximum of the mainline traffic volume as an objective function. Since then, the prelude of the research and application of ramp metering has been opened [4].
The fixed-time strategy proposed by Wattleworth is simple for modeling, easy to implement, and also with the low implementation cost. However, it is an ideal mathematical model based on constant historical demands instead of real-time traffic volume. Later, many scholars improved it to be a multiple interval fixed-time control method [5, 6]. However, whether it is pre-timed control, time-of-day control, etc., it is formulated as a static optimization problem probably inconsistent with real traffic conditions.
3.2 Responsive Strategies
Responsive control strategy considers the dynamic conditions of traffic demand, which mainly depends on the technological level of electronic and embedded system. It can be divided into three categories: demand-capacity control method, density control method (or occupancy control strategy) and gap-acceptance control method [7].
Demand-Capacity Control Method
In 1975, Masher [8] proposed a single ramp demand-capacity control strategy with the traffic volume as the control parameter, and it adjusts the ramp traffic volume entering the mainline in order to control the mainline traffic volume not to exceed the downstream traffic capacity, thus to fully utilize the mainline.
demand-capacity control method expressed by the downstream traffic capacity
Merely Considering the difference between section capacities, the ramp metering rate (\( r \)) only depends on the upstream traffic flow (\( q_{u} \)) and the downstream capacity (\( C_{d} \)). The former can be obtained by detectors, and the latter is fixed. The basic calculation method is:
-
If \( C_{d} > q_{u} + r \), the ramp is open and there is no control;
-
If \( {\text{C}}_{d} \) is slightly larger or equal to (\( q_{u} + r \)), ramp metering rate \( r = C_{d} - q_{u} \);
-
If \( C_{d} < q_{u} + r \), the ramp is closed.
Where \( C_{d} \) is a constant parameter, the input parameter is \( q_{u} \), and the output parameter is \( r \). It considers only the physical capacity of the road, and is a non-feedback control with single input and single output. This strategy can be adopted in the area of low density.
demand-capacity control method combined with downstream occupancy factors
In combination with the occupancy rate (or density) factor, \( O_{out} \left( k \right) \) is used to indicate the detection value of occupancy rate of the downstream road segment, and \( O_{cr} \) is the optimal occupancy rate, \( C_{d} = q_{cap} \), \( q_{u} = q_{in} \), and the basic demand-capacity control is improved [9]. It is an improvement of DC, but not clearly stated how to determine the minimum adjustment amount. If the downstream road volume is less than its capacity, then the remaining capacity of the downstream is positive, otherwise it is negative. If the remaining capacity of the downstream is negative, it indicates that the traffic volume of this expressway section exceeds its capacity, so the minimum adjustment rate should be adopted.
D-C control method is an idealized strategy, easy to implement, and is widely used in North America.
Occupancy Control Method
The D-C control is actually an open loop control, and has poor anti-interference ability, so the occupancy control method emerged, and the most classic method is ALINEA [9, 10], which keeps the downstream occupancy rate of the ramp less than a certain value (occupancy threshold), by detecting the downstream occupancy rate in real time and adjusting the ramp metering rate. The specific formula is as follows:
-
Where \( r\left( k \right) \): the ramp metering rate at the kth time, the vehicle/h;
-
\( K_{R} \): the adjustment rate parameter, the vehicle/h;
-
\( O_{out} \left( {k - 1} \right) \): the downstream road segment occupancy rate at the \( k - 1 \) time;
-
\( \hat{o} \): the road segment setting occupation rate.
Obviously, ALINEA does not depend on any specific traffic flow model and any traffic conditions, and it also changes the metering rate in a relatively gentle way. Papageorgiou et al. [11] compared the ALINEA with other methods, and showed that ALINEA had its priority in application, and was widely used in many cities, such as Paris, Amsterdam, Glasgow, Munich, etc.
However, ALINEA does not take into account factors such as queuing length. So a number of improved models have emerged. AD-ALINEA [12] considers the occupancy rate to be affected by traffic composition, weather conditions, etc., and has a high sensitivity, and predicts the occupancy in real time When it is difficult to detect downstream occupancy, UPALINEA [13] achieves ALINEA control method by detecting only upstream traffic volume and converting to ALINEA control method with formula. X-ALINEA [13] considers the queuing situation of the ramp caused by the ALINEA algorithm, and adjusts the control rate when the maximum queue length is reached.
3.3 Adaptive Control Strategies
Adaptive dynamic programming is a cross-disciplinary field generated by the fusion of artificial neural network, optimal control and reinforcement learning, and can also be considered as the extension of reinforcement learning in discrete fields to the continuous fields [14].
The adaptive control method in the domain of transportation is to regard the traffic system as an uncertain system, feedback is used to realize dynamic optimization adjustment of signal timing. Refer to ramp metering, there are also many researches of adaptive dynamic programming, such as neural network [15], fuzzy logic [16], adaptive dynamic programming [17], genetic algorithm, particle swarm algorithm [18] and their fusion or improved form.
3.4 Integrated Optimization Control Strategy
Integrated optimization control considers the factors together such as intersection channelization, signal timing, network route decision-making, variable lane, turn restrictions and transit priority. So it is a multi-objective nonlinear programming problem; a representative method is the lane-based optimization method. The lane-based optimization method was first proposed by Wong CK, Wong SC [19, 20], which defines all design variables based on lanes, and makes a series of constraints into linear system of equations, thus ensures to be a solvable optimal model. Thereafter, the lane-based optimization method is further developed and expanded [21, 22]. Jing Zhao [23] gives an integrated signal optimization control model that considers the flexible division of the lane function. As there are more and more factors considered, the model gets closer to the actual situation, but it becomes more and more complicated.
4 Coordinated Ramp Metering Strategies and Algorithms
4.1 Coordinated with Surface Road Control Systems
As urban space resource is extremely limited, on-ramps (or off-ramps) are often very close to the ground intersection, so it is necessary to cooperative ramp metering with surface road control systems.
Kwon (2002) proposed to coordinate on-ramps and surface road intersections by defining the degree of congestion in order to balance the on-ramp congestion and the congestion of the ground intersection [24]. Changliang Y, Honghai L (2010) analyzed the composition and relationship of queuing congestion within the control range of off-ramp and auxiliary roads, and provided guidance and basis for formulating coordinated control strategies by giving the relationship diagrams of queuing congestion with flow and signal control [25]. Zhang X et al. (2013) proposed a speed control method for ramps of expressway and took the on-ramp of Wuning Road in Shanghai as an example, the implementation effects of uncontrolled, timing control and speed control were also simulated and analyzed [26].
Most of other current studies focused on the improved ALINEA method of coordinating control systems of ramps and ground intersections.
4.2 Coordinated with Other Control Systems
With the lengthening of the main line of the expressways, other methods besides ramp metering become gradually popular, so there exist various control methods such as the mainstream speed limit, on-ramp speed limit, route guidance, etc., which can prevent congestions cooperative with ramp metering [27]. Mainstream Traffic Flow Control (MTFC) is the typical representative, which is formed by the combination of main line speed limit and ramp metering, and also coordinated control of ramp metering with route guidance, coordinated control of ramp metering and monetary cost, and so on. Merely ramp metering sometimes can’t prevent traffic congestions effectively, and may even cause the queue length of the ramps to be too long, which may also make the congestions of the auxiliary roads and adjacent intersections. So the combination of ramp metering and route guidance measures (such as VMS (variable message signs), vehicle navigation systems, radio, etc.) to adjust the spatial distribution of traffic, and to guide them to pass through uncongested roads and intersections.
In brief, ramp metering gradually works coordinated with other control systems instead of independently.
4.3 Multi Ramp Joint Control Strategy
Multi ramp joint control strategy focuses on metering several ramps or all the ramps of the whole systems, it has a clear control objective, which is usually travel time or traffic flow of the entire system, by considering system constraints, such as maximum allowable queue length, bottleneck capacity, and so forth. However, these algorithms’ performances basically depend on the quality of input data (such as OD matrices, estimated ramp capacity, and predicted traffic demands), and the traffic models used [2].
Bottleneck Algorithm
Jacobsen et al. proposed the Bottleneck algorithm in 1989 [28]. As one of the competitive ramp metering algorithms: At the single-point level, it uses the occupancy control method to obtain the regulation law of each ramp. At the cooperative level, it first detects and determines the mainstream bottleneck, and then use the principle of flow conservation to calculate the total adjustment values of upstream on-ramps, and finally after comparing the two adjustment values at each ramp, it takes the smaller value as the actual adjustment value. This strategy is simple and easy, and it is essentially identical with the hierarchy control that appears later. The differences between them lie in the complexity of the upper-level target optimization method. Many scholars have also applied Bottleneck for ramp metering research and got good results.
Linear Programming Method (LP) and Nonlinear Programming Method
Yoshino et al. [29] first developed and implemented the algorithm on the Hanshin Expressway in Japan. The classical system optimal control can be divided into two types: linear open loop control and nonlinear open loop control. Linear open loop control mainly refers to LP control. AMOC [30] (advanced motorway optimal control), DMCS [31] (dynamic metering control system), and ARMS [32] (advanced real-time metering system) are nonlinear open-loop control.
The LP control method proposed by Yang [33] considered the constraints of ramp queuing, and analyzed the characteristics, its model is as follows:
The total mileage of the inflow traffic (car ∙ km) is the largest
Mainline section capacity constraint
Constraint of off-ramps queuing
Constraint of on-ramp queuing and demand
Where: \( U_{i}^{S} \,{\text{the on}} - {\text{ramp i }} \) vehicles entering the mainline from during the \( {\text{s}} \) unit; \( \bar{d}_{i}^{S} \) the mean mileage of the inflow traffic from the on-ramp \( {\text{i}} \) during the \( {\text{sth}} \) unit; \( Q_{ik}^{rs} \) the proportion of traffic from the ith on-ramp within the \( {\text{r}} \)th unit control period to the \( {\text{j}} \)th off-ramp within the \( {\text{s}} \)th unit; \( C_{k}^{o} \) the capacity of the \( {\text{k}} \)th section of the main line; \( C_{j}^{o} \) the maximum number of allowed queued vehicles; \( Z_{j}^{o} \) the maximum queuing vehicles’ numbers of the jth off-ramp; \( Y_{j}^{s} \) at the initial of the \( {\text{s}} \) th unit control period off-ramp j queuing vehicles’ numbers; \( D_{i}^{s} \) on-ramp i arrival vehicles numbers during the \( {\text{s}} \) unit; \( L_{i}^{o} \) the maximum queuing vehicles’ numbers of the ith on-ramp; \( L_{i}^{s} \) at the initial of the sth unit the ith on-ramp queuing vehicles’ numbers.
Hierarchy Control Method
In theory, the system optimal control strategy can make the expressway traffic flow always in the optimal state, but its shortcomings are obvious: the model is often too complicated, the solving process is cumbersome, and it may produce no optimal solution or convergence. Due to the particularly serious problem of the nonlinear method, the hierarchy control method proposed by Papageorgiou [34, 35] solved this problem to some extent. The aforementioned heuristic coordinated control strategy based on the qualitative semi-quantitative design idea: the bottom layer is generally implemented by an isolated ramp metering algorithm, and the coordinated layer is designed by experiences. The hierarchy control strategy differs in that there is a relatively obvious control objective function in the coordinated layer, but the solution does not require a complete mathematical algorithm for the derivation and demonstration, which can be regarded as a transition between heuristic coordinated control strategy and LP (and NLP). And recently there are some studies about the optimal controller method in the hierarchy control architecture [36, 37].
METALINEA
METALINEA [38] is a type of ALINEA application in coordinated control and belongs to the Linear Quadratic (LQ) control type.
Where: \( r = \left[ {r_{1} \cdots r_{m} } \right]^{T} \): the vector of m controllable on-ramp volumes; \( o = \left[ {o_{1} \cdots o_{m} } \right]^{T} \): the vector of n measured occupancies on the expressway sections; \( O = \left[ {O_{1} \cdots O_{m} } \right]^{T} \): the vector of m measured occupancies of the downstream mainline; \( \hat{O} = \left[ {\hat{O}_{1} \cdots \hat{O}_{m} } \right]^{T} \): the vector of m objective occupancies of the downstream mainline; \( K_{1} \in R_{m*m} , K_{2} \in R_{n*n} \): Gain matrix.
4.4 Network Flow Coordinated Control
The transportation network is a combination of various concerned systems, and the application of network flow control theory on ramp metering is widely studied.
Aiming at the expressway congestion problem, a network flow control method proposes ramps as control buffer and mainstream as mainline, by communication network theory, applies packet congestion control and active queue management control to establish the control system structure of the expressway network. Oh JS et al. [39], Miller HJ [40] and other researchers portrayed the interchange space structure model [41, 42]. For the first time, Li [43] proposed a new abstract network description form for the interchange. This general form is not only a plan, but also shows the basic topology of the interchange, and it is also a complex and weighted network, which indicates the spatial connection structure and physical characteristics for the interchange traffic flow transformation.
5 Conclusion and Outlook
In summary, researches on ramp metering of urban expressway are very abundant, which shows ramp metering is an effective and essential measures to solve expressway problems. This paper discusses several isolated and coordinated ramp metering strategies and algorithms, from multi-target coordinated control of isolated ramp to multi-ramp coordinated control of one-direction mainline, then to regional coordinated control of multi-ramp. As the factors considered increase, the algorithms are closer to the actual traffic conditions. In Future ramp metering researches will focus on integration and interaction with ground transportation systems and other ITS systems (including Advanced Vehicle Control Systems, Dynamic Route Guidance System and Advanced Traveler Information System). However, it requires more inputs mainly based on real-time data, so also a challenge for SCADA system.
References
Shaaban, K., Khan, M.A., Hamila, R.: Literature review of advancements in adaptive ramp metering. Procedia Comput. Sci. 83, 203–211 (2016)
Wang, H.: Advanced control strategy of urban expressway traffic flow. Beijing University of Technology (2003)
Wattleworth, J.A., Berry, D.S.: Peak period analysis and control of a freeway system some theoretical investigations. HRB Ree 89, 1–25 (1965)
Yang, J.: Research on ramp traffic mechanism and ramp metering design of urban expressway. Chongqing Jiaotong University (2008)
Iida, Y., Hasegawa, T., Asakura, Y., et al.: A formulation of onramp traffic control system with route guidance for urban expressway. In: IFAC 6th International Conference on Control in Transportation Systems. France, pp. 229–236 (1989)
Iida, Y., Asakum, Y., Tanaka, H.: Optimal on-ramp traffic control method for urban expressway network with multiple routes. In: Proceeding of Infrastructure Planning, pp. 305–312 (1986)
Zheng, J., Dong, D., Chen, H.: Comparison analysis on ramp metering strategies for urban expressway. Comput. Meas. Control 14(2), 196–199 (2006)
Masher, D.P., Ross, D.W., Wong, P.J., et al.: Guidelines for design and operating of ramp metering systems. Stanford Research Institute, Report NCHRP3-22, SRI Project 3340 (1975)
Papageorgiou, M., Blosseville, J.M., Hadj-Salem, H.: Modelling and real-time control of traffic flow on the southern part of Boulevard Peripherique in Paris, Part II: coordinated on-ramp metering. Transp. Res. Part A (General) 24(5), 362–370 (1990)
Papageorgiou, M., Hadj-Salem, H., Blosseville, J.M.: ALINEA: a local feedback control law for on-ramp metering. Transp. Res. Rec. J. Transp. Res. Board 1320, 58–64 (1991)
Papageorgiou, M., Hadj-Salem, H., Middelham, F.: ALINEA: a local ramp metering, summary of field results. Transp. Res. Rec. J. Transp. Res. Board 1603, 90–98 (1997)
Papageorgiou, M.: Traffic control. In: Handbook of Transportation Science, 2nd edn. Kluwer Academic Publishers, Boston (2002)
Smaragdis, E., Papageorgiou, M.: A series of new local ramp metering strategies. In: 82nd Annual Meeting of the Transportation Research Board, Washington DC, Paper No. 03 3171 (2003)
Zhao, D., Liu, D., Yi, J.: Review of urban traffic signal optimization control method based on adaptive dynamic programming. Acta Automatica Sinica 35(6), 676–681 (2009)
Zhang, H.M., Ritchie, S.G.: Freeway ramp metering using artificial neural networks. Transp. Res. Part C (Emerg. Technol.) 5(5), 273–286 (1997)
Chen, L.L., May, A.D., Auslander, D.M.: Freeway ramp metering using fuzzy set theory for inexact reasoning. Transp. Res. Part A (General) 24(1), 15–25 (1990)
Xu, J., Wang, F.Y.: Ramp metering based on adaptive critic designs. In: Proceedings of IEEE International Conference on Intelligent Transportation Systems, Toronto, pp. 1531–1536 (2006)
Teodorovic, D.: Swarm intelligence systems for transportation engineering: principles and applications. Transp. Res. Part C (Emerg. Technol.) 16, 651–667 (2008)
Wong, C.K., Wong, S.C.: Lane-based optimization of signal timings for isolated junctions. Transp. Res. Part B 37, 63–84 (2002)
Wong, C.K., Wong, S.C.: Lane-based optimization method for multi-period analysis of isolated signal control junctions. Transportmetrica 2(1), 53–85 (2006)
Zhao, J., Ma, W., Zhang, H., et al.: Increasing the capacity of signalized intersections with dynamic use of exit lanes for left-turn traffic. Transp. Res. Rec. J. Transp. Res. Board 2355(2355), 49–59 (2013)
Sun, W., Wu, X., Wang, Y., et al.: A continuous-flow-intersection-lite design and traffic control for oversaturated bottleneck intersections. Transp. Res. Part C Emerg. Technol. 56, 18–33 (2015)
Zhao, J., Liu, Y.: Integrated signal optimization and non-traditional lane assignment for urban freeway off-ramp congestion mitigation. Transp. Res. Part C Emerg. Technol. 73, 219–238 (2016)
Kwon, T.M., Ambadipudi, R., Kim, S.: Signal operations research laboratory for development and testing of advanced control strategies, Phase II. Center Transp. Stud. 55–70 (2002)
Changliang, Y., Honghai, L.: Coordinated control strategy of expressway-exit-auxiliary road signal and urban road intersection signal. Road Traffic Saf. 10(3), 38–44 (2010)
Zhang, X., Pan, C., Xun, Y.: A new signal coordination control model of joint area at the expressway conventional network. In: LISS 2012 (2013)
Lan, L., Jian, S., Keping, L.: On-ramp speed control of urban expressway. J. Transp. Inf. Saf. 29(3), 15–19 (2011)
Jacobsen, L., Henry, K., Mahyar, O.: Real-time metering algorithm for centralized control. Transp. Res. Rec. 1232, 17–26 (1989)
Yoshino, T., Sasaki, T., Hasegawa, T.: The traffic-control system on the Hanshin expressway. Interfaces 25(1), 94–108 (1995)
Chen, O., Hotz, A., Ben-Akiva, M., et al.: Development and evaluation of a dynamic ramp metering control model. In: 8th IFAC Symposium on Transportation System, Chania, pp. 1162–1167 (1997)
Liu, J.C., Kim, J., Chen, Y., et al.: An Advanced Real Time Metering System: The System Concept. Department of Transportation, Texas (1993)
Liu, J.C., Kim, J., Lee, S., et al.: The advanced distributed ramp metering system (ARMS). In: Workshop on Parallel & Distributed Real-Time Systems (1994)
Yang, X.: Coordinated responsive metering methodologies and research of traffic system for urban expressway. Tongji University (1996)
Papageorgiou, M.: A hierarchical control system for freeway traffic. Transp. Res. Part B (Methodological) 17(3), 251–261 (1983)
Papageorgiou, M.: Application of automatic control concepts to traffic flow modeling control. In: Balakrishnan, A.V., Thoma, M. (eds.) Lecture Notes on Control and Information Sciences, pp. 59–162. Springer, Heideberg (1983)
Zhang, G., Wang, Y.: optimizing coordinated ramp metering: a preemptive hierarchical control approach. Comput. Aided Civ. Infrastruct. Eng. 28(1), 22–37 (2013)
Meshkat, A., Zhi, M., Vrancken, J.L.M., et al.: Coordinated ramp metering with priorities. Intel. Transport Syst. IET 9(6), 639–645 (2015)
Taale, H., Schouten, W.J.J.P., Koote, J.V.: Design of a coordinated ramp-metering system near Amsterdam. In: International Conference on Road Traffic Monitoring & Control. IET (2002)
Oh, J.S., Cortes, C.E., Jayakrishnan, R., et al.: Microscopic simulation with large-network path dynamics for advance traffic management and information systems. Department of Civil Environmental Engineering and Institute of Transportation Studies, University of California Irvine, UCI-ITSTS-WP99-11, pp. 6–9 (1999)
Miller, H.J., Shaw, S.-L.: Geographic Information Systems for Transportation Principles and Applications, pp. 55–62, 321–324. Oxford University Press, Inc., Oxford
Zhang, J.: Study on control and guidance method for expressway communication. China Agriculture University (2005)
Chen, T.: Research on models of congestion forecast and control based on systems science theories. Southeast University (2005)
Li, J.: Theory and Method on Ramp Traffic Control. Beijing Jiaotong University Press, Beijing (2013)
Acknowledgments
This research is supported by the Shanghai Science and Technology Committee (Number 17DZ1204003), and by Key Project of Special Development Fund for Zhangjiang National Independent Innovation Demonstration Zone in Shanghai (Number 201705-JD-C1085-056, 207105-JD-C1085-072).
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Gai, S., Zeng, X., Wu, C., Zhan, J. (2019). Review of Ramp Metering Methodologies for Urban Expressway. In: Zeng, X., Xie, X., Sun, J., Ma, L., Chen, Y. (eds) International Symposium for Intelligent Transportation and Smart City (ITASC) 2019 Proceedings. ITASC 2019. Smart Innovation, Systems and Technologies, vol 127. Springer, Singapore. https://doi.org/10.1007/978-981-13-7542-2_12
Download citation
DOI: https://doi.org/10.1007/978-981-13-7542-2_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-7541-5
Online ISBN: 978-981-13-7542-2
eBook Packages: EngineeringEngineering (R0)