
Abstract
Correct prediction of the hydrodynamic derivatives is essential for the accurate determination of ships manoeuvring performance. Numerical and experimental methods are widely used for the determination of these derivatives. Even though experimental methods are more reliable, these facilities are rare and often prohibitively expensive. More viable option, primarily during the early stages of the ship design, is to determine these derivatives numerically. And also most of the ship manoeuvring studies and regulations are on deep water conditions, whereas the ship manoeuvring performance is much worse in shallow waters, and its controllability is difficult. An attempt is made in this paper to study the shallow water effects on the sway velocity-dependent derivatives and rudder derivatives numerically. KRISO container ship (KCS), a benchmark example used by different research groups, is taken for the present study. Straight line or static drift tests are performed in a numerical environment at different drift and different rudder angles using a commercial CFD package. These tests are conducted in both deep and shallow water conditions. Effects of water depth on the sway velocity-dependent hydrodynamic derivatives and rudder derivatives are evaluated, and the results are presented and analysed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Manoeuvring quality assessment for seagoing vessels is essential for the navigational safety purpose. International Maritime Organization (IMO) has prescribed guidelines for the seagoing vessels to ensure its navigational safety as well as operational efficiency during its voyage. Manoeuvring quality of a ship primarily depends on the hull geometry and is to be essentially determined in its initial stage of design. The surface ship manoeuvrability is governed by the equations of motions in surge, sway and yaw motions which are relevant motions in the horizontal plane. The directional stability and control characteristics of a ship are generally understood by solving these manoeuvring equations of motion for which the knowledge of hydrodynamic derivatives are important. Accurate prediction of hydrodynamic derivatives determines the quality of prediction of the manoeuvring characteristic of vessel such as turning ability and course keeping ability rudder effectiveness. Empirical relations given by researchers [1, 2] give a rough estimate of the hydrodynamic derivatives but fail to predict higher order and coupled non-linear derivatives. Numerical and experimental methods are widely used for the estimation of hydrodynamic derivatives. Even though experimental methods are more reliable, these facilities are rare and often prohibitively expensive. More viable option, primarily during the early stages of the ship design, is to determine these derivatives numerically.
In shallow water, the flow around the vessel modifies drastically and thus the hydrodynamic derivatives also. Ships operating in these regions become sluggish and behave poorly to the action of control surfaces. Hence, the correct estimation of hydrodynamic derivatives in shallow water is inevitable to predict the vessels manoeuvring behaviour when it is operating in water depth-restricted regions such as ports, harbours, inland waterways. Experimental facilities for shallow water manoeuvring studies are very rare all over the world. With the advancement of computational techniques, the application of computational fluid dynamic (CFD) is emerging as a powerful tool for the prediction of ship manoeuvring performance even for different water depth conditions. The manoeuvring performance results obtained from CFD are promising and are reliable when compared to the actual ships manoeuvring performance [3,4,5]. This paper presents the influence of water depth on the velocity derivatives Yv, Nv, Yvvv, Nvvv and rudder derivatives Yδ, Nδ, Yδδδ and Nδδδ. Stationary straight line tests with different drift angles and rudder angles were conducted using commercial CFD software STAR-CCM+. Numerical simulations were conducted for both deep water and shallow water conditions. Shallow water condition as H/T = 1.5 is taken for the current study.
2 Nomenclature
- B :
-
Beam (m)
- CB:
-
Block coefficient
- CM:
-
Midship area coefficient
- D :
-
Depth (m)
- H :
-
Water height (m)
- L oa :
-
Length overall (m)
- L pp :
-
Length between perpendiculars (m)
- L wl :
-
Load water line (m)
- N v :
-
Hydrodynamic linear coupled derivative of yaw moment with respect to sway velocity
- N vvv :
-
Hydrodynamic third-order coupled derivative of yaw moment with respect to sway velocity
- N δ :
-
Hydrodynamic linear coupled derivative of yaw moment with respect to rudder deflection
- N δδδ :
-
Hydrodynamic third-order coupled derivative of yaw moment with respect to rudder deflection
- T :
-
Draft (m)
- Y v :
-
Hydrodynamic linear coupled derivative of sway force with respect to sway velocity
- Y vvv :
-
Hydrodynamic third-order coupled derivative of sway force with respect to sway velocity
- Y δ :
-
Hydrodynamic linear coupled derivative of sway force with respect to rudder deflection
- Y δδδ :
-
Hydrodynamic third-order coupled derivative of sway force with respect to rudder deflection
- V :
-
Forward velocity of the ship (m/s)
- v :
-
Sway velocity (m/s)
- β :
-
Drift angle (°)
- δ :
-
Rudder angle (°)
3 Straight Line Test
Sway velocity and rudder derivatives are found out by simulating the straight line test in CFD environment. Straight line tests are conducted for different drift angles (β = 3, 6, 9, 12, 15, 18) to estimate the sway velocity derivatives Yv, Yvvv, Nv and Nvvv, (Fig. 1). Rudder derivatives Yδ, Yδδδ, Nδ and Nδδδ are estimated by giving different rudder angles (δ = 5, 10, 15, 20, 25, 30, 35) to the vessel with zero drift angle (Fig. 2). Numerical simulations are carried out for both deep water (H/T > 3) and for shallow water (H/T = 1.5) conditions.

Model with drift angle

Model with rudder deflection
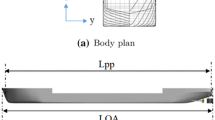
4 Hull Geometry
The KRISO container ship (KCS) model, a benchmark model being used by different research groups worldwide, has been chosen for the present study. The main particulars of the vessel and model details are shown in Table 1.
5 Numerical Study
Commercial CFD package STAR-CCM+ is used for the present study. Solver settings for both deep and shallow water conditions are given in Table 2.
5.1 Computational Domain
Fluid domain (Table 3) is selected based on the ITTC Standards [6]. Two different computational domains are created based on deep water (H/T = 25) (Fig. 3) and shallow water (H/T = 1.5) (Fig. 4) conditions. The boundary conditions (Table 4) are applied to the computational domain for the analysis. Wave damping option is enabled at the side wall boundaries to avoid wave reflections.

Deep water domain

Shallow water domain
5.2 Mesh Generation
Unstructured trimmed hexahedral mesh is generated with near wall prismatic layers using CFD tool (Figs. 5 and 6). Three separate volumetric blocks at bow, stern and free surface are created with refined mesh density. Separate meshes are generated for different drift angles and for different rudder angles for each simulation trials. Mesh generated for 9° drift angle (Fig. 7) and 20° rudder angle (Fig. 8) is given below.

Generated mesh

Mesh configuration around the vessel

Ship at 9° drift angle

Ship at 20° rudder angle
6 Grid Independence Study
Grid independence study is performed to ensure that the results are unaffected by the base size/number of cells. Four different grid sizes are selected to analyse the grid dependency. Inflow velocity of 1.1 m/s is given to the ship model, and the total resistance is estimated. It is observed that there is not much variation exists between the base sizes 0.1 and 0.085. Hence, the base size of 0.1 m with 1.7 million cells is selected. Grid independence test results are given in Table 5.
7 Grid Validation with CFD and Experimental Results
Numerical CFD resistance test for KCS model is conducted for different speeds with the same generated mesh condition, 0.1 m of base size and 1.7 million cells. Experimental resistance test (Fig. 9) is conducted at IIT Madras towing tank facility where the model is towed at different speeds, and the total resistance is measured at its design displacement. CFD and experimental resistance test results are given in Table 6, and the same are compared in Fig. 10. The values closely match, and hence, the same grid is used for numerical analysis.

KCS resistance test arrangement

CFD and experimental result comparison
8 Numerical Tests, Results and Discussions
Straight line tests are conducted for both deep water and shallow water conditions.
8.1 Deep Water Condition
8.1.1 Sway Velocity Derivatives
Sway force and yaw moment acting on the vessel at its centre of gravity are estimated for different drift angles. These forces are plotted against the sway velocity v (Figs. 11 and 12). The sway velocity is given by

Plot of sway force against sway velocity

Plot of yaw moment against sway velocity
The hydrodynamic derivatives are calculated by taking the slope of the curve at v = 0. Tests are conducted only to port side drift angle of the vessel, and values are mirrored by considering ship symmetry about its central longitudinal vertical plane. Yv, Nv, Yvvv, Nvvv are non-dimensionalised by using the following relations (Table 7).
Third-order cubical curves are fitted on the above plots. Curves fitted with third-order polynomial in non-dimensional format are given below.
Hydrodynamic derivatives are obtained by differentiating the above equation with respect to sway velocity, v at v = 0 and equating the terms with that of Taylor series representation of force and moment. The order of differentiation depends on the order of derivatives to be estimated. Equating the likely terms with Taylor series will give the following relation for the hydrodynamic derivatives.
The non-dimensional hydrodynamic derivatives estimated are
8.1.2 Rudder Derivatives
Sway force and moment acting at the centre of gravity of the vessel for different rudder angles are estimated from the CFD analysis (Table 8). These are plotted against rudder angle (Figs. 13 and 14). The data is fitted with a third-order cubic polynomial curve and is represented in non-dimensional format as below.

Sway force plotted against rudder angle

Yaw moment plotted against rudder angle
Rudder derivatives are non-dimensionalised by using the following relations.
Hydrodynamic rudder derivatives are obtained by differentiating the non-dimensional Eqs. 12 and 13 with respect to rudder angle, δ at δ = 0 and equating the terms with that of Taylor series representation of force and moment. Order of differentiation depends on the order of requirement of derivatives. Expression for rudder derivatives is listed below.
Estimated non-dimensional rudder derivatives are given below.
8.2 Shallow Water Condition
8.2.1 Sway Velocity Derivatives
Numerical simulations are repeated for shallow water condition with H/T = 1.5. Sway forces and yaw moments are estimated for different drift angles (Table 9). These values are plotted against sway velocity (Figs. 15 and 16). Third-order polynomial is fitted on the plot. This gives the cubic polynomial expression for sway force and yaw moment in non-dimensional format as

Plot of sway force against sway velocity

Plot of yaw moment against sway velocity
Hydrodynamic derivatives are estimated by using Eqs. 8, 9, 10 and 11. Estimated derivatives are given below.
8.2.2 Rudder Derivatives
Rudder derivatives are estimated by measuring the sway force and yaw moment acting at the centre of gravity of the vessel in shallow water condition (Table 10). These values are plotted against rudder angle (Figs. 17 and 18). Third-order polynomial curve is fitted on the graph and is represented in non-dimensional format as below.

Sway force plotted against rudder deflections

Yaw moment plotted against rudder deflections
The derivatives are estimated by taking the slope of the curve at δ = 0 by using Eqs. 14, 15, 16 and 17. Rudder derivatives estimated are given below.
9 Summary and Conclusion
In the present study, straight line tests are conducted with different drift angles and rudder angles for both deep water and shallow water conditions. Numerical analysis clearly indicates the influence of water depth on these hydrodynamic derivatives. Sway velocity derivatives \(Y_{v}^{\prime }\) and \(N_{v}^{\prime }\) in shallow water show a variation of −112.65 and −121.18%, respectively, compared to that in deep water condition. Third-order derivatives \(Y_{vvv}^{\prime }\) and \(N_{vvv}^{\prime }\) show drastic variation of −562.73 and −542.66% from deep water to shallow water condition. Shallow water effect has a negative influence on the rudder performance too, as expected due to the inferior flow conditions. \(Y_{\delta }^{\prime }\) and \(N_{\delta }^{\prime }\) in shallow water are 26.3 and 44.1% higher than that in deep water. \(Y_{\delta \delta \delta }^{\prime }\) and \(N_{\delta \delta \delta }^{\prime }\) also follow the same trend and varies 37.45 and 60.6%, respectively, when water depth changes from deep to shallow. The numerical study clearly shows the effects of water depth on the manoeuvring performance of the container ship. This study can be further extended by estimating the acceleration derivatives and by simulating the turning trajectory of the vessel.
References
Inoue S, Hirano M, Kijima K (1981) Hydrodynamic derivatives on ship maneuvering. Int Ship Building Prog 28(321):112–125
Kijima K, Nakari Y, Furukawa Y (2000) On prediction method for ship manoeuvrability. In: Proceedings of international workshop on ship manoeuvrability at Hamburg ship model basin, paper no. 7, Hamburg, Germany
Carrica PM, Ismail F, Hyman M, Bhushan S, Stern F (2013) Turn and zig-zag maneuvers of surface combatant using URANS approach with dynamic overset grids. J Mar Sci Technol 18:166–181
Cura-Hochbaum A (2011) On the numerical prediction of the ship’s manoeuvring behaviour. Ship Sci Technol 5(9):27–39
Delefortrie G, Vantorre M (2007) Modeling the maneuvering behaviour of container carriers in shallow water. J Ship Res 51(4):287–296
ITTC recommended procedures (2011) Guidelines on use of RANS tools for ManeuverinPrediction. In: Proceedings of 26th ITTC
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Balagopalan, A., Krishnankutty, P. (2019). Numerical Study of Water Depth Effect on Sway Velocity and Rudder Derivatives of a Container Ship in Manoeuvring. In: Murali, K., Sriram, V., Samad, A., Saha, N. (eds) Proceedings of the Fourth International Conference in Ocean Engineering (ICOE2018). Lecture Notes in Civil Engineering, vol 22. Springer, Singapore. https://doi.org/10.1007/978-981-13-3119-0_16
Download citation
DOI: https://doi.org/10.1007/978-981-13-3119-0_16
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3118-3
Online ISBN: 978-981-13-3119-0
eBook Packages: EngineeringEngineering (R0)