
Abstract
The aim of the paper is to demonstrate the application of system identification technique to estimate the hydrodynamic derivatives with the full-scale manoeuvring data of a ship. The application of such technique would be for design of autopilots, enhancement of manoeuvring characteristics of ships in service and validation of mathematical model for ship manoeuvring. The paper briefly describes the mathematical model for ship manoeuvring used for parameter identification of a bulk carrier using extended Kalman filter system identification technique. The standard manoeuvres conducted in line with the recommendations of International Maritime Organization (IMO) resolution 137 include turning circle trials and crash stop trial details are presented and using extended Kalman filter technique hydrodynamic derivatives are estimated. This paper includes also the full scale trial data of a inshore patrol vessel.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The inshore patrol vessel is a light-armed surface vessel primarily designed for patrol, search and rescue operations in shallow and coastal waters. The vessel is fitted with three waterjets. Waterjet propulsion is being fitted to the patrol vessels to improve the propulsive efficiency as well as the turning and stopping characteristics at high speeds which are quite important during patrol, search and rescue operations. The hull form is a double chine planing hull form with transom stern designed to facilitate fitment of waterjets. Knowledge of full-scale manoeuvring characteristics is an added advantage to the ship staff especially soon after the delivery of the ship. The data was recorded during the sea trials of the vessel. The body plan and ship’s photograph taken during the trials are shown in Fig. 1.

Body plan (left) and photograph (right) of inshore patrol vessel
The bulk carrier presented in this paper is a 38,000 T displacement vessel with a service speed of about 14 knots. The vessel is propelled by a conventional single screw fixed pitch propeller driven by a four-stroke slow speed directly reversible marine diesel engine. The hull form is a typical high block merchant hull form. The full-scale sea trial data was recorded at the ballast draft. The ship’s hull form and photograph are shown in Fig. 2.

Hull form (left) and photograph (right) of bulk carrier
1.1 Main Particulars of the Inshore Patrol Vessel and Bulk Carrier
The main particulars of the inshore patrol vessel and the bulk carrier are as given below:
Inshore patrol vessel | Vessel bulk carrier | |
|---|---|---|
Length (LBP) | 44.00 m | 170 m |
Breadth of the ship | 8.36 m | 28 m |
Depth of the ship | 4.50 m | 14 m |
Draft of the ship during trial | 1.65 m | 5 m |
Displacement of the ship during trial | 330 tonne | ~19,000 tonne |
Speed of the ship during trials | 34 knots | 15 knots |
Main engines power | 3 × 2720 kW | 6500 kW |
Propulsion | 3 × waterjets | Single screw FPP |
In this paper, the results of turning circle trials and crash stop trial of the bulk carrier and the turning circle trials of the inshore patrol vessel conducted during full-scale sea trials are presented.
The data of the full-scale sea trials of bulk carrier is utilized to identify the hydrodynamic derivatives of the bulk carrier using extended Kalman filter technique.
2 Full-Scale Sea Trials—Methodology and Results
In this section, the procedure for conducting each trial presented in this paper is described.
2.1 Turning Circle Trial
The turning circle trials are conducted to establish the turning characteristics of the vessel, namely the tactical diameter, advance and transfer of the ship. IMO specifies the criteria for turning characteristics of ships over 100 m in length. The same criteria are followed for this ship as well. A typical plot of ship’s track during turning circle manoeuvre is shown in Fig. 3. The step-by-step procedure for conduct of turning circle manoeuvre is as given below [1, 2]:

Typical plot of ship’s track during turning circle manoeuvre
-
(a)
A suitable heading of the ship is chosen and maintained.
-
(b)
The engine RPM is set to a value not less than the RPM corresponding to 85% MCR.
-
(c)
The speed of the ship on GPS is observed and is maintained not less than 90% of speed corresponding to 85% MCR setting on the engine.
-
(d)
Once the desired speed and heading are achieved and are steady, the turning circle manoeuvre is initiated by ordering the rudder/waterjets 35/30° to port.
-
(e)
From the time, the order is executed, and the manoeuvre is deemed initiated; the following parameters are continuously recorded at regular intervals:
-
Position—latitude and longitude
-
Course
-
Heading
-
Speed
-
Rudder/waterjet angle
-
Wind speed and direction.
-
-
(f)
The rudder/waterjets are maintained at 35°/30° until the ship completes one complete circle, i.e. the ship’s heading reaches the initial steady heading.
-
(g)
After 360° change in heading, the rudder/waterjets are ordered amidships and the manoeuvre is complete.
-
(h)
From the observations, the track of the ship is plotted and the following are calculated and compared with the IMO criteria for compliance:
-
(i)
The advance of the ship is measured as the distance travelled by the ship (in the direction of the initial heading) and by the time, ship’s heading has changed by 90° from the initial heading.
-
(ii)
The transfer of the ship is measured as the lateral distance travelled by the ship in the direction perpendicular to initial heading and by the time, the ship’s heading has changed by 90°.
-
(iii)
The tactical diameter is measured as the distance travelled by the ship in a direction perpendicular to the initial heading and by the time, the ship’s heading has changed by 180°.
-
(i)
Port and starboard turning circle manoeuvres were conducted for inshore patrol vessel by deflecting the waterjets to 30° port and starboard, respectively. The turn was conducted at full-load displacement of 330 tonne. The initial conditions like the draft of the ship, sea and wind conditions during the trial are given in Table 1. The maximum angle of heel recorded during the turning circle trial was 12°. The tactical diameter, advance of the ship and transfer of the ship measured from the plotted track of the ship are compared with the IMO limiting values and presented in Table 1. The plot of ship’s track during port and starboard turns is presented in Fig. 4.

Plot of ship’s track during port and starboard turning circle manoeuvres of inshore patrol vessel
Port and starboard turning circle manoeuvres were conducted for bulk carrier by deflecting the rudder to hard (35°) port and starboard, respectively. The turn was conducted at displacement of about 19,000 tonnes. The initial conditions like the draft of the ship, sea and wind conditions during the trial are given in Table 2. The tactical diameter, advance of the ship and transfer of the ship measured from the plotted track of the ship are compared with the IMO limiting values and presented in Table 2. The plot of ship’s track during port and starboard turns is presented in Fig. 5.

Plot of ship’s track during port and starboard turning circle manoeuvres of bulk carrier
2.2 Crash Stop Trial
The crash stop trials are conducted to establish the minimum distance travelled by the ship before becoming dead in water. During an emergency, the vessel must be stopped at the shortest possible time and distance so as to avoid a collision. The stopping distance, the time taken together with the environmental conditions recorded during sea trials will be a very useful guidance to the captain of a new ship. A typical plot of ship’s track during crash stop manoeuvre is shown in Fig. 6. The step-by-step procedure for conduct of crash stop trial is as given below [1, 2]:

Typical plot of ship’s track during crash stop trials
-
(a)
The ship’s heading is maintained steady, and the engine RPM is set to achieve speed of the ship not less than 90% of the speed corresponding to 85% of MCR.
-
(b)
Once the ship attains steady heading and desired speed on the GPS, the crash stop manoeuvre is executed by reversing the waterjet direction by deploying the waterjet buckets in case of water jet propulsion for inshore patrol vessels or by reversing the engine and direction of rotation of propeller, thrust in case of bulk carrier.
-
(c)
The recording of data starts and the following parameters are recorded continuously:
-
Position—latitude and longitude.
-
Heading
-
Speed
-
Rudder/waterjet angle
-
Wind speed and direction.
-
-
(d)
The time taken for the ship to be dead in water is also recorded. In order to accurately determine the ship stop, it is recommended to carry out the trial in daylight even though the ship stop can be observed from the change in speed in the GPS.
-
(e)
From the observations, the track of the ship is plotted and the track length, head reach and the lateral deviation are measured and checked for compliance with the IMO criteria.
-
(f)
In general, the crash stop trials are conducted for both ahead to astern and astern to ahead directions.
-
(g)
The IMO limiting value for the length of the track before the ship is dead in water is 15 times the ship’s length.
The crash stop trials were conducted at full-load displacement for inshore patrol vessel. The waterjet was reversed by deploying the buckets. The initial conditions and results of crash stop trial are as given below:
- Ship speed:
-
28.3 knots
- Depth of water:
-
50.0 m
- Mean draft:
-
1.65 m
- Wind speed:
-
13.5 knots
- Time for ship stop:
-
25.0 s
- Distance travelled:
-
209.0 m (4.75 L)
- IMO limit:
-
15 L
The crash stop trials were conducted at 19,000 T displacement for bulk carrier. The engine telegraph was ordered full astern from full ahead, and the thrust direction was reversed. The initial conditions and results of crash stop trial are as given below:
- Ship speed:
-
14.1 knots
- Depth of water:
-
50.0 m
- Mean draft:
-
5.1 m
- Wind speed:
-
10.0 knots
- Time for ship stop:
-
587 s
- Distance travelled:
-
2407 m (14.2 L)
- IMO limit:
-
15 L
3 Mathematical Model
The following equations with three degrees of freedom are written in a right-handed orthogonal coordinates system, moving with a ship, with the origin fixed at the mid-ship of a ship. The sign conventions are shown in Fig. 7.

Co-ordinate system showing sign convention
where the terms with subscripts H, P and R represent the hull forces, the propeller forces and the rudder forces, respectively. QE and QP are the main engine torque and the propeller torque, respectively.
-
(a)
Hull Forces
where \(X(u)\) is obtained from the resistance test.
During the crash stopping, the forward motion of the ship may become relatively small compared to the lateral motion of the ship, and the cross-flow drag component becomes dominant. In that case, the hull forces are represented as follows:
-
(b)
Propeller forces and engine torque
where
In the above equation, \(Y_{\text{P}}\) and \(N_{\text{P}}\), introduced to describe the propeller forces during the reverse rotation of the propeller, and can be considered as functions of J.
The thrust deduction factor, t and the effective propeller wake fraction, \(w_{\text{P}}\) are treated as functions of ship motion and operating condition.
For a diesel engine, the characteristics of main engine torque are as follows:
-
(c)
Rudder forces
where
\(F_{\text{N}} = \frac{1}{2}\rho A_{\text{R}} U_{\text{R}}^{2} f_{\text{a}} \sin a_{\text{R}}\)
\(\begin{aligned} & \eta {:}\;{\text{ratio of propeller diameter to rudder height}} \\ & \varepsilon ,\kappa {:}\;{\text{coefficients representing propeller slip stream}} \\ & f_{\text{a}} {:}\;{\text{rudder normal force coefficient}} \\ & \delta_{0} :{\text{neutral rudder angle}} \\ & \gamma {:}\;{\text{flow straightening coefficient}} \\ & {l}_{\text{R}} {:}\; {\approx }2x_{\text{R}} \\ \end{aligned}\)
-
Nomenclature used in Describing Mathematical Model and Geometry
Symbol | Definition |
|---|---|
B | Maximum beam at design full-load waterline |
K | Characteristic length; length between perpendiculars |
S | Wetted surface area |
T | Draft at design full-load condition |
\(\nabla\) | Volume of displacement at design full-load condition |
\(C_{\text{B}}\) | Block coefficient; \({\nabla \mathord{\left/ {\vphantom {\nabla {\text{LBT}}}} \right. \kern-0pt} {\text{LBT}}}\) |
\(A_{\text{T}}\) | Total planform rudder area |
\(A_{\text{F}}\) | Fixed rudder area |
\(A_{\text{R}}\) | Movable rudder area |
\(\bar{b}\) | Mean span of rudder |
\(c_{\text{r}}\) | Root chord of rudder |
\(c_{\text{t}}\) | Tip chord of rudder |
A | Rudder aspect ratio; bar \({{\bar{b}^{2} } \mathord{\left/ {\vphantom {{\bar{b}^{2} } {A_{\text{T}} }}} \right. \kern-0pt} {A_{\text{T}} }}\) |
C | Propeller blade chord at 0.7 radius |
D | Propeller diameter |
P | Propeller pitch at 0.7 radius |
-
Hydrodynamic Coefficients
Symbol | Nondimensional form | Definition |
|---|---|---|
\(I_{z}^{\prime }\) | \(I_{z}^{\prime } = \frac{{I_{z} }}{{\frac{1}{2}\rho L^{5} }}\) | Moment of inertia of ship about z-axis |
J | \(J = \frac{u}{nD}\) | Propeller advance coefficient based on ship speed \(u\) |
m | \(m^{\prime } = \frac{m}{{\frac{1}{2}\rho L^{3} }}\) | Mass of ship |
N | \(N^{\prime } = \frac{N}{{\frac{1}{2}\rho L^{3} U^{2} }}\) | Hydrodynamic moment component about z-axis (yawing moment) |
\(N_{r}\) | \(N_{r}^{\prime } = \frac{{N_{r} }}{{\frac{1}{2}\rho L^{4} U}}\) | First-order coefficient used in representing N as a function of \(r\) |
\(N_{{r^{\prime } }}\) | \(N_{{r^{\prime } }}^{\prime } = \frac{{N_{r} }}{{\frac{1}{2}\rho L^{5} }}\) | Coefficient used in representing \(N\) as a function of \(r\) |
\(N_{{{r}\left| {r} \right|}}\) | \(N_{{{r}\left| {r} \right|}}^{\prime } = \frac{{N_{{{r}\left| {r} \right|}} }}{{\frac{1}{2}\rho L^{5} }}\) | Second-order coefficient used in representing \(N\) as function of \(r\) |
\(N_{v}\) | \(N_{v}^{\prime } = \frac{{N_{v} }}{{\frac{1}{2}\rho L^{3} U}}\) | First-order coefficient used in representing N as a function of \(r\) |
\(N_{{v^{\prime } }}\) | \(N_{{v^{\prime } }}^{\prime } = \frac{{N_{{v^{\prime } }}^{\prime } }}{{\frac{1}{2}\rho L^{4} }}\) | Coefficient used in representing \(N\) as a function of \(\dot{v}\) |
\(N_{vrr}\) | \(N_{vrr}^{\prime } = \frac{{N_{vrr} }}{{\frac{1}{2}\rho L^{5} U^{ - 1} }}\) | Coefficient used in representing \(N_{v}\) as a function of \(r^{2}\) |
\(N_{v\left| v \right|}\) | \(N_{v\left| v \right|}^{\prime } = \frac{{N_{v\left| v \right|} }}{{\frac{1}{2}\rho L^{3} }}\) | Second-order coefficient used in Representing \(N\) as a function of \(v\) |
\(N_{vvr}\) | \(N_{vvr}^{\prime } = \frac{{N_{vvr} }}{{\frac{1}{2}\rho L^{4} U^{ - 1} }}\) | Coefficient used in representing \(N_{v}\) as a function of the product \(vr\) |
\(n\) | Propeller revolution rate | |
\(n_{c}\) | Propeller revolution rate at steady command speed | |
\(r\) | \(r^{\prime } = \frac{rL}{U}\) | Angular velocity component about z-axis relative to fluid |
\(\dot{r}\) | \(\dot{r}^{\prime } = \frac{{\dot{r}L^{2} }}{{U^{2} }}\) | Angular acceleration component about z-axis relative to fluid |
\(U\) | \(U^{\prime } = \frac{U}{U}\) | Linear velocity of origin of body axes relative to fluid |
\(u\) | \(\dot{u} = \frac{u}{U}\) | Component of \(U\) in direction of the x-axis |
\(\dot{u}\) | \(\dot{u} = \frac{{u^{\prime } L}}{{U^{2} }}\) | Time rate of change of u in direction of the x-axis |
\(V\) | Absolute speed in knots | |
\(v\) | \(v^{\prime } = \frac{v}{V}\) | Component of U in direction of the y-axis |
\(\dot{v}\) | \(\dot{v}^{\prime } = \frac{{\dot{v}L}}{{U^{2} }}\) | Time rate of change of \(v\) in direction of the y-axis |
\(x\) | \(x^{\prime } = \frac{x}{L}\) | Longitudinal body axis; also the coordinate of a point relative to the origin of body axes |
\(x_{G}\) | \(x_{G}^{\prime } = \frac{{x_{G} }}{L}\) | The x-coordinate of centre of gravity |
\(\beta\) | Drift angle | |
\(\delta\) | Rudder angle | |
\(\dot{\delta }\) | \(\dot{\delta }^{\prime } = \frac{{\dot{\delta }L}}{U}\) | Rudder deflection rate |
\(\eta\) | \(\eta = \frac{{J_{c} }}{J}\) | Ship propulsion ratio |
\(y\) | \(y^{\prime } = \frac{y}{L}\) | Lateral body axis; also the coordinate of a point relative to the origin of body axes |
\(\psi\) | Heading or yaw angle | |
\(X_{{u^{\prime } }}\) | \(X_{{u^{\prime } }}^{\prime } = \frac{{X_{{u^{\prime } }} }}{{\frac{1}{2}\rho L^{3} }}\) | Coefficient used in representing \(X\) as a function of \(\dot{u}\) |
\(X_{vr}\) | \(X_{vr}^{\prime } = \frac{{X_{vr} }}{{\frac{1}{2}\rho L^{3} }}\) | Coefficient used in representing \(X\) as a function of the product \(vr\) |
\(X_{vv}\) | \(X_{vv}^{\prime } = \frac{{X_{vv} }}{{\frac{1}{2}\rho L^{2} }}\) | Second-order coefficient used in representing \(X\) as function of \(v\) |
\(Y_{v}\) | \(Y_{c}^{\prime } = \frac{{Y_{v} }}{{\frac{1}{2}\rho L^{2} U}}\) | First-order coefficient used in representing \(Y\) as a function of \(v\) |
\(Y_{{v^{\prime}}}\) | \(Y_{{v^{\prime } }}^{\prime } = \frac{{Y_{{v^{\prime } }} }}{{\frac{1}{2}\rho L^{3} }}\) | Coefficient used in representing \(Y\) as a function of \(\dot{v}\) |
\(Y_{vrr}\) | \(Y_{vrr}^{\prime } = \frac{{Y_{vrr} }}{{\frac{1}{2}\rho L^{4} U^{ - 1} }}\) | Coefficient used in representing \(Y_{v}\) as a function of \(r^{2}\) |
\(Y_{vvr}\) | \(Y_{vrr}^{\prime } = \frac{{Y_{vrr} }}{{\frac{1}{2}\rho L^{3} U^{ - 1} }}\) | Coefficient used in representing \(Y_{v}\) as a function of the product \(vr\) |
\(Y_{v\left| v \right|}\) | \(Y_{v\left| v \right|}^{\prime } = \frac{{Y_{v\left| v \right|} }}{{\frac{1}{2}\rho L^{2} }}\) | Second-order coefficient used in representing \(Y\) as a function of \(v\) |
\(Y\) | \(Y^{\prime } = \frac{Y}{{\frac{1}{2}\rho L^{2} }}\) | Hydrodynamic force component along y-axis |
\(Y_{r}\) | \(Y_{r}^{\prime } = \frac{{Y_{r} }}{{\frac{1}{2}\rho L^{3} U}}\) | First-order coefficient used in representing \(Y\) as a function of \(r\) |
\(Y_{{r^{\prime } }}\) | \(Y_{{r^{\prime } }}^{\prime } = \frac{{Y\dot{r}}}{{\frac{1}{2}\rho L^{4} }}\) | Coefficient used in representing \(Y\) as a function of \(\dot{r}\) |
\(Y_{r\left| r \right|}\) | \(Y_{r\left| r \right|}^{\prime } = \frac{{Y_{r\left| r \right|} }}{{\frac{1}{2}\rho L^{4} }}\) | Second-order coefficient used in representing \(Y\) as a function of \(r\) |
4 System Identification Technique Extended Kalman Filter
Mathematical model establishment is one of the important steps in the system identification technique. The parameters of the mathematical model of a system and its structure are established from the measured inputs and outputs of the system in system identification process. Identification of the system from inputs and outputs is relatively less costly in comparison with experimentation. Identification/establishment of ship manoeuvring hydrodynamic derivatives using experimental techniques like PMM is expensive than the use of system identification technique to establish the ship manoeuvring hydrodynamic derivatives from standard full-scale manoeuvres conducted during the sea trials. The equations of motion of a ship in the horizontal plane contain the ship manoeuvring hydrodynamic derivatives as the parameters which are established using system identification. Continuous least squares technique, recursive least squares technique, Kalman filter technique, extended Kalman filter technique, neural networks, R-MISO method are some of the established identification techniques for identification of ship manoeuvring hydrodynamic derivatives
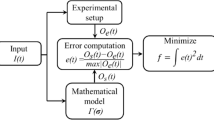
In this paper, the extended Kalman filter technique has been used to identify the manoeuvring hydrodynamic derivatives.
The process followed is depicted in Fig. 8.

Extended Kalman filter system identification technique process flow
With the rudder angle, heading angle, yaw rate and surge as the inputs for the mathematical model described in Sect. 3, the ship manoeuvring hydrodynamic derivatives have been identified and are presented in Sect. 5.
The extended Kalman filter system identification technique has been implemented in FORTRAN.
5 Results of System Identification Using Extended Kalman Filter Technique
The following hydrodynamic derivatives have been identified using extended Kalman filter system identification technique implemented in FORTRAN (Table 3).
6 Conclusions
The salient conclusions and observations of the present study are given below:
Turning circle and crash stop trials: the manoeuvring characteristics are meeting the laid down IMO criteria as per IMO Res. MSC 137 (76).
The turning circle manoeuvre has been simulated using the identified hydrodynamic derivatives, and the percentage variation between the trial results and simulated values of tactical diameter and advance are 1.34 and 12.7%, respectively. The mathematical model described in the paper is most suitable for bulk carrier hull forms and can together be utilized for estimation of hydrodynamic derivatives using extended Kalman filter technique for typical high block bulk carrier hull forms.
References
IMO (2002) Standards for ship manoeuvrability. Resolut MSC 137(76)
IMO (2002) Explanatory notes to the standards for ship manoeuvrability. MSC/Circ 1053
Acknowledgements
The authors acknowledge CMD of M/s Hindustan Shipyard Limited, Visakhapatnam, for allowing this work to be carried out during the sea trials.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
RaviSekhar RadhaKrishna, K.O.S.R., Panneer Selvam, R. (2019). Estimation of Hydrodynamic Derivatives from Sea Trial Data Using System Identification Technique. In: Murali, K., Sriram, V., Samad, A., Saha, N. (eds) Proceedings of the Fourth International Conference in Ocean Engineering (ICOE2018). Lecture Notes in Civil Engineering, vol 22. Springer, Singapore. https://doi.org/10.1007/978-981-13-3119-0_11
Download citation
DOI: https://doi.org/10.1007/978-981-13-3119-0_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-3118-3
Online ISBN: 978-981-13-3119-0
eBook Packages: EngineeringEngineering (R0)