
Abstract
In today’s world one of the major concerns for the electronics engineers and scientists is how to reduce the power consumption of the electronics devices. To overcome this problem we come across different technologies. Radio Frequency (RF) Microelectromechanical (MEMS) switches are one of the leading technologies for past two decades. But the main concern with RF MEMS switches is its high actuation voltage and high switching time. This paper generally concentrates on the simulation of RF MEMS contact switch having Y-shaped cantilever beam to obtain low actuation voltage with less switching time. The simulation and results are obtained by the Intellisuite 8.7v software. The actuation voltage depends on the air gap, Young’s modulus, thickness of the beam etc. The “pull-in” voltage is found to be 1.2 V and the switching time is about 52.3 µs.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Micro Electro Mechanical system or Micro system is a multidisciplinary topic which generally comprises of electronics, mechanical, biomedical etc., it generally miniaturize the device. By miniaturization we mean reducing the value, reducing the cost, reducing the size etc., but there should not be any effect on the function of the device i.e., functionality should be constant. The RF MEMS switch is one of the most studied and one of first in RF MEMS technology. The physics behind the RF MEMS switch is similar to as ‘mechanical relay’, but on size it resembles with semiconductor switches [1]. The RF MEMS based switches out-shine the traditional semiconductor switches such as PIN diodes, HEMTs, FETs. The main problem with RF MEMS switches are its high switching time, its power handling capacity is less, its actuation voltage is high, and its reliability is less as compared to solid state counterpart [2]. In 2017, Raman, Shanmuganantham design a serpentine spring structure RF MEMS switch whose actuation voltage comes around 4 V [3]. In 2015, Attaran and Rashidzadeh, proposed a novel design to reduce the actuation voltage and the switch structure is helical and its actuation voltage is as low as 0.5 V [4]. In 2017, Khan and Shanmuganantham design an arc shape cantilever beam RF MEMS switch and its actuation voltage is about 1.4 V [6], in this paper the main focus is to reduce the actuation voltage. This paper generally discusses about the Y- shaped cantilever beam for lower the actuation voltage and decreases the transient response of the switch.
2 Proposed Design
The RF MEMS switches are generally divided into two parts: Static analysis and Dynamic analysis. It is a Y-shape cantilever beam which is anchored at one end and another end is freely hanging over the CPW transmission line. The design parameter of the beam such as its length, width, thickness, air gap and width of lower electrode is given in Table 1.
Whereas the silicon substrate thickness is 50 µm and a bias voltage is given between the lower electrode and the cantilever beam as the cantilever beam gets deflects by 1 µm we get the actuation voltage. The material used for making the switch is aluminum (Al) [5] (Figs. 1, 2 and 3).

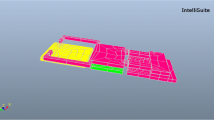
Top view of Y shaped cantilever beam

Side view of Y shaped cantilever beam

Schematic representation of cantilever beam
3 Mathematical Modeling
3.1 Static Analysis
In the static analysis we generally give attention to the mechanical behavior of the beam and the physics behind the electrostatic actuation of the beam (Fig. 4).

Simple cantilever beam
Mechanical Analysis.
In this we generally give attention the mechanical parameters of the beam such as its Young’s modulus, spring constant, moment of inertia and Poisson’s ratio etc.
When a force F is applied at the free end of the beam it gets deflected by ∆x and it is given by
Where K represents spring constant of cantilever and is given by [8]
Where E represents Young’s modulus and the moment of inertia of the rectangular cross-section is defined as [8]
Electrostatic Analysis.
The concept behind the electrostatic actuation is simply the electrostatic force between the two parallel plates. The capacitance between two plates is given by
Where g represents beam height above the lower electrode and \( {\mathbf{\mathcal{E}}} \) represents the permittivity of the medium. The electrostatic force is given by the [9]
Where V represents the applied bias voltage between the beam and the lower electrode and Fe represents electrostatic force. So when we equate the electrostatic force with the spring force we get
Where g0 is the beam height for zero bias voltage. By solving Eq. (6) for voltage we get
At (\( \frac{2}{3} \)) g0 mechanical restoring force becomes more than the electrostatic force resulting cantilever beam becomes unstable then beam collapse to down state position. By putting the value of g in the Eq. (7) we get [9]
Where Vp is known as “pull-in voltage” or “actuation voltage”.
3.2 Dynamic Analysis
The dynamic analysis of the switch is generally used to find out the transient response of the switch i.e., the switching time. The frequency of the beam is given by
Where m is mass of the cantilever beam and quality factor of the beam is given by
Where b is the damping coefficient and it can be reduce by using holes in the cantilever beam. It is found from experiments that if Q ≤ 0.5 then shows slow switching time and if Q ≥ 2 then it shows long settling time when it released. So for better performance Q = 1. For Q ≤ 0.5 the switching time is given by the [10]
Now when the Q ≥ 2 and damping coefficient is very small (b = 0) then the switching time is given by the [10]
4 Fabrication Process
The virtual surface micromachining process is used here for fabrication in Intellisuite 8.7v software in Intellifab module. First silicon is defined then three masks are used for building the device. First aluminum is deposited by conformal deposition for making lower electrode and CPW transmission line. Second anchor is build by depositing a sacrificial layer then last cantilever beam is mounted on the anchor and the sacrificial layer which is used for providing air gap is completely removed [7].
5 Simulations and Results
The simulation has been done in the Intellisuitev8.7 software in the thermo electromechanical (TEM) module. First of all simulation is set then material is selected then boundary conditions were applied for fixing the anchor and the substrate. Then load is given in terms of voltage between the lower electrode and the beam so as to get pull-in voltage. From the Fig. 5 it can be seen that switch shows a deflection of 1.0526 µm and from the Fig. 6 it can be seen that mises stress is about 2.1962 Mpa. From the simulation we get the vertical displacement of the cantilever with applied voltage is shown in the Fig. 7 and it is found to be about 1.2 V. From Fig. 8 it is clear that the switching time is about 52.3 µs.

Switch displacement

Mises stress

Voltage V/s beam vertical displacement

switching time of the switch
6 Conclusion
The switch was designed in the 2-D layout then it is fabricated in the Intellifab and then simulated in the TEM analysis module. From the simulated results we can say that pull-in voltage is found to be 1.2 V and switching time is about 52.3 µs. So from the Table 2 we can say that though the actuation voltage of Ref. [4] is 0.5 V, which is better than this design but transient response of this design is far better than Ref. [4] which is about 0.5 ms. From the analysis we can say that some parameters are crucial in determining the pull-in voltage and the switching time of the switch. Since these switches show very good results so it is widely used as defense and research applications. We can further wok on its S-parameters, reliability, power handling etc., for overall better performance.
References
Raman, R., Shanmuganantham, T.: Conjoined rectangular beam shaped RF micro-electro-mechanical system switch for wireless applications. Int. J. Adv. Microwave Technol. (IJAMT) 1(1) (2016)
Raman, R., Shanmuganantham, T.: Design and modeling of RF MEMS metal contact switch for wireless applications. In: International Conference on Control, Instruments, Communication and Computational Technologies (ICCICCT) (2016)
Raman, R., Shanmuganantham, T.: Frequency reconfiguration of microstrip patch antenna with serpentine spring shaped RF MEMS switch. Int. J. Adv. Microwave Technol. (IJAMT) 2(1) (2017)
Attaran, A., Rashidzadeh, R.: Ultra low actuation voltage RF MEMS switch. Micro Nano Syst. Lett. 3(7) (2015)
Raman, R., Shanmuganantham, T.: Design and analysis of RF MEMS switch with π shaped cantilever beam for wireless applications. In: IEEE International Conference on Emerging Technological Trends (ICETT) (2016)
Khan, A.S., Shanmuganantham, T.: Arc-shaped cantilever beam RF MEMS switch for low actuation voltage. In: IEEE International Conference on Circuits and Systems (2017)
Khan, A.S., Shanmuganantham, T.: Simulation and analysis of RF MEMS cantilever switch for low voltage actuation. In: IEEE International Conference on Circuits and Systems (2017)
Rebeiz, G.M., Muldavin, J.B.: RF MEMS switches and switch circuits. IEEE Microwave Mag. 2, 59–71 (2001)
Varadan, V.K., Vinoy, K.A., Jose, K.A.: RF MEMS and Their Applications. Wiley, New York (2003)
Rebeiz, G.: RF MEMS Theory, Design and Technology. Wiley, New York (2003)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Khan, A.S., Shanmuganantham, T. (2019). Y-Shaped Cantilever Beam RF MEMS Switch for Lower the Actuation Voltage. In: Verma, S., Tomar, R., Chaurasia, B., Singh, V., Abawajy, J. (eds) Communication, Networks and Computing. CNC 2018. Communications in Computer and Information Science, vol 839. Springer, Singapore. https://doi.org/10.1007/978-981-13-2372-0_45
Download citation
DOI: https://doi.org/10.1007/978-981-13-2372-0_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-2371-3
Online ISBN: 978-981-13-2372-0
eBook Packages: Computer ScienceComputer Science (R0)