
Abstract
In DC railways, the running rails are used as the return path for traction current, which inevitably leads to stray current and rail potential issues with poor insulation. However, the effects of existing solutions are limited, so DC auto-transformer (DCAT) traction power supply system (TPSS) is analyzed in this paper to solve the problems of stray current and rail potential fundamentally. Compared with the existing TPSS (E-TPSS), the mathematical analysis and simulation results show that DCAT-TPSS may solve both stray current and rail potential issues, which further reduce the voltage drop and power loss of power supply lines additionally.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Nowadays, with the economic development and the growing of population, rail transit systems play a more and more important role in transportation. In DC railways, the running rails act as the return path of traction current. However, the running rails are not totally isolated from the ground, so a part of current leaks to the ground, which causes stray current issue. The stray current results in the electric potential difference between the rails and the ground, which is called rail potential [1,2,3,4]. The stray current will not only cause serious corrosion of the underground structures such as reinforced concrete, but also reduce the service life of the pipelines, such as oil and natural gas pipelines, resulting in greater economic losses. Meanwhile, the rail potential will also threaten the safety of passengers and the safe operation of DC railways.
The main solutions for DC railways to reduce stray current and rail potential include: (1) improving the supply voltage level; (2) strengthening the insulation between the rails and the ground; (3) reducing the rail resistance; (4) establishing stray current collection network; (5) adopting the drainage protection method, the cathodic protection method and other protective means to protect the corrosion objects; (6) setting the rail over-voltage protection devices (OVPD) [5,6,7,8]. Although these methods may reduce stray current and rail potential, the costs are too high while the effects are limited. So the stray current and rail potential issues still cause huge economic losses. The fundamental reason for the limited effects of these methods is that the running rails always act as the return path of traction current, and it’s essential to propose a new structure of traction power supply system (TPSS) to solve the problems fundamentally.
In order to solve the above mentioned issues, the fourth-rail DC railway system has been used in practice [9, 10]. But it requires additional provision for the fourth rail, whereas the cost is high. The fourth-rail DC railway system needs to improve the train’s design additionally, so it doesn’t get a wide range of promotion. Reza Fotouhi [11] proposed a DC booster circuit to reduce stray current and rail potential in DC railways, by using DC booster circuit to transfer the traction current from the rail to the return line. This method requires additional provision of the return line and a number of the booster circuits, meanwhile each booster requires two bulky inductors and eleven switches. All switches are operating in the hard switching mode, and there is dead time interval between the switching operating modes. During the dead time interval, the traction current still goes through the rail like the existing TPSS (E-TPSS). Qunzhan Li [12] proposed a single-phase AC TPSS to replace E-TPSS for urban rail transit. With higher power supply voltage, the insulation level between the train and tunnels is higher. What’s more, the train’s traction drive system needs to be improved greatly with DC power supply changed to AC power supply.
Compared with these systems’ problems in terms of power density, efficiency, cost, reliability and so on, Trillion Q. Zheng [13] proposed DC auto-transformer (DCAT) TPSS. DCAT-TPSS uses DCAT to transfer the traction current from the rail to the negative feeder, thus reduces stray current and rail potential fundamentally. DCAT-TPSS is verified through the mathematical analysis and simulation in this paper, by comparing with E-TPSS based on grounded scheme. The results show that DCAT-TPSS not only solves both stray current and rail potential issues, but also reduces the voltage drop and power loss of power supply lines.
2 Configuration and Principle of DCAT-TPSS
Figure 1 shows the general configuration of DCAT-TPSS, which adds the negative feeder and several DCATs compared with E-TPSS. Figure 2 shows the configuration of DCAT, which is comprised of two capacitors and one energy transfer module (ETM). The ETM is responsible for balancing the voltage across of capacitors. The ETM may adopt the resonant cell (including the resonant capacitor and the resonant inductor) to transfer the energy, as shown in Fig. 2b, or the DC inductor, as shown in Fig. 2c, and the principles of ETM have been introduced in [13, 14]. Moreover, DCAT’s terminals (i.e. HPT, MPT and LPT) are connected to the contact line (or the third rail), the rail and the negative feeder respectively.

General configuration of DCAT-TPSS

Configuration of DCAT and ETM
In DCAT-TPSS, DCAT is used as a step-up converter in the substation side and a step-down converter in the train side, when the train runs under traction condition. Therefore, the voltage level of power supply lines increases, the voltage drop and power loss of power supply lines decreases, and the power supply distance of the substations can be further extended. What’s more, the train’s voltage level remain unchanged in DCAT-TPSS, which means the existing trains may be used in DCAT-TPSS directly without any improvement.
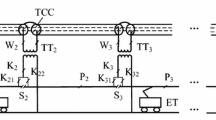
As shown in Fig. 1, substation1 and substation2 supply the energy to the train together, and by installing four DCATs, the rail can be divided into three sections: section I, section II and section III. Figure 3 shows the current distribution of DCAT-TPSS when the train is running on section II. No matter which section the train is running on, DCAT will transfer the total traction current from the rail to the negative feeder. Thus the traction current only exists in the section which the train is running on, and the current of the section which no train is running on is zero. So DCAT-TPSS may solve the problems of stray current and rail potential fundamentally.

The current distribution of DCAT-TPSS when the train is running on section II
3 Mathematical Analysis of DCAT-TPSS and E-TPSS
To compare DCAT-TPSS and E-TPSS, this paper will discuss rail potential, stray current, leakage charge, voltage drop and power loss of power supply lines based on grounded system (i.e. the negative terminal of the substations is grounded).
Figures 4 and 5 show the equivalent model of E-TPSS and DCAT-TPSS respectively. In these models, the substations are equivalent to voltage sources V in , and the train is equivalent to current source I o . The distance between the substations is l, and the distance between the train and the substation1 is x. The resistance per unit length of the rail, the contact line and the negative feeder is R. What’s more, by installing N + 1 DCATs, the rail of DCAT-TPSS can be divided into N sections, and the train runs on section N1 + 1 (i.e. the running section).

The equivalent model of E-TPSS

The equivalent model of DCAT-TPSS
3.1 Rail Potential
Based on the equivalent models of E-TPSS and DCAT-TPSS, the rail potential gets the maximum value V max at position of the train, and the rail potential gets the minimum value (i.e. 0) at position of the substations. From the equivalent models, the maximum rail potential value of E-TPSS and DCAT-TPSS can be described as
So the maximum rail potential ratio of DCAT-TPSS to E-TPSS is expressed as
3.2 Stray Current
Because the rail potential causes the voltage difference between the rail and the ground, under the resistance R G between the rail and the ground, the leakage current I G will gather together continuously, and cause the stray current issue. From the equivalent models, the maximum stray current value of E-TPSS and DCAT-TPSS can be described as
So the maximum stray current ratio of DCAT-TPSS to E-TPSS is expressed as
3.3 Leakage Charge
According to the analysis of the stray current, the sum of the leakage currents equals to the sum of the maximum stray currents on the left and right sides of the train. For simplified analysis, it is assumed that the train runs from the substation1 to the substation2 at a constant speed v, and the sum of the leakage charges of E-TPSS and DCAT-TPSS can be calculated as
So the leakage charge ratio of DCAT-TPSS to E-TPSS is expressed as
3.4 Voltage Drop and Power Loss of Power Supply Lines
Based on the equivalent models of E-TPSS and DCAT-TPSS, the average voltage drop and power loss of power supply lines can be expressed as
So the average voltage drop ratio and power loss ratio of DCAT-TPSS to E-TPSS are expressed as
From the mathematical analysis of DCAT-TPSS and E-TPSS, DCAT-TPSS can solve the rail potential, stray current and leakage charge issues effectively compared with E-TPSS, and reduce the voltage drop and power loss of the power supply lines additionally, which means DCAT-TPSS can improve power distance and power efficiency of the substations.
Compared with E-TPSS, if the rail is divided into N sections in DCAT-TPSS, it can be concluded as: (1) the maximum rail potential ratio is 1/N; (2) the maximum stray current ratio is 1/N2; (3) the leakage charge ratio is 1/N2; (4) the average voltage drop ratio and power loss ratio are (N + 3)/4. As can be seen in Fig. 6, with increasing the number N of sections (i.e. add one to the number of DCATs), the effect of DCAT-TPSS will be better. With comprehensive consideration of the effect and the cost of DCAT-TPSS, the recommended number of sections is 3 to 5 under the different distance between the substations.

The ratio of DCAT-TPSS to E-TPSS
4 Simulation Results
In order to validate the above mathematical analysis, build DCAT-TPSS as shown in Fig. 1, and E-TPSS in Matlab software, which are based on grounded system. DCAT’s EMT adopts the type A (i.e. the resonant cell), and the main parameters of DCAT-TPSS and E-TPSS are given in Table 1. To simplify the analysis, all the components are assumed ideal.
Figure 7 shows the comparison about the rail potential and stray current, when the train is running on the midpoint of the rail. The rail potential at position of the train achieves the maximum value, and the stray current at position of the substations achieves the maximum value. Figure 8 shows the comparison about the sum of leakage currents, leakage charge, voltage drop and power loss, when the train runs from the substation1 to the substation2. The sum of leakage currents, the voltage drop and power loss achieve the maximum value when the train is running at midpoint of the rail, and the leakage charge achieves the maximum value when the train is running at right substation (i.e. the end of the travel).

Comparison when the train is running on the midpoint of the rail

Comparison when the train runs from the substation1 to the substation2
The simulation results are consistent with the mathematical results, which proves the correctness of the mathematical analysis. The simulation results show that DCAT-TPSS can effectively solve the problems of rail potential and stray current, and reduce the voltage drop and power loss of the power supply lines.
5 Conclusion
DCAT-TPSS has been described and demonstrated in this paper. Mathematical analysis and simulation results show that, DCAT-TPSS may solve rail potential and stray current issues by transferring the traction current from the rail to the negative feeder, and reduce the voltage drop and power loss additionally with the voltage level of power supply lines doubling, which effectively proves that DCAT-TPSS has a promising application prospect in DC railways.
References
Ibrahem A, Elrayyah A, Sozer Y, De De Abreu-Garcia JA (2017) DC railway system emulator for stray current and touch voltage prediction. IEEE Trans Ind Appl 53(1):439–446
S-Y Xu, Li W, Wang Y-Q (2013) Effects of vehicle running mode on rail potential and stray current in DC mass transit systems. IEEE Trans Veh Technol 62(8):3569–3580
Tzeng Y-S, Lee C-H (2010) Analysis of rail potential and stray currents in a direct-current transit system. IEEE Trans Power Deliv 25(3):1516–1525
Charalambous CA, Aylott P (2014) Dynamic stray current evaluations on cut-and-cover sections of DC metro systems. IEEE Trans Veh Technol 63(8):3530–3538
Cotton I, Charalambos C, Aylott P, Ernst P (2005) Stray current control in DC mass transit systems. IEEE Trans Veh Technol 54(2):722–730
Liu YC, Chen JF (2005) Control scheme for reducing rail potential and stray current in MRT systems. IEE Proc—Electr Power Appl 152(3):612–618
Paul D, Guest Author (2016) DC stray current in rail transit systems and cathodic protection. IEEE Ind Appl Mag 22(1):8–13
Zaboli A, Vahidi B, Yousefi S, Hosseini-Biyouki MM (2017) Evaluation and control of stray current in DC-electrified railway systems. IEEE Trans Veh Technol 66(2):974–980
Jin J, Allan J, Goodman CJ, Payne K (2004) Single pole-to-earth fault detection and location on a fourth-rail DC railway system. IEE Proc-Electr Power Appl 151(4):498–504
Zhang Y (2011) Technology of traction power supply for the fourth traction return rail of transit. Mod Urban Trans 4:8–10 (in Chinese)
Fotouhi R, Farshad S, Fazel SS (2009) A new novel DC booster circuit to reduce stray current and rail potential in DC railways. 2009 Compat Power Electron:457–462
Li Q (2015) Industrial frequency single-phase AC traction power supply system and its key technologies for urban rail transit. J Southwest Jiaotong Univ 50(2):199–207 (in Chinese)
Zheng TQ, Yang X, You X (2016) DC auto-transformer based traction power supply system for urban rail transit. Urban Rapid Rail Trans 29(3):91–97 (in Chinese)
Sano K, Fujita H (2008) Voltage-balancing circuit based on a resonant switched-capacitor converter for multilevel inverters. IEEE Trans Ind Appl 44(6):1768–1776
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities (2017JBM057).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Wang, M., Yang, X., Wang, L., Zheng, T.Q. (2018). DC Auto-Transformer Traction Power Supply System for DC Railways Application. In: Jia, L., Qin, Y., Suo, J., Feng, J., Diao, L., An, M. (eds) Proceedings of the 3rd International Conference on Electrical and Information Technologies for Rail Transportation (EITRT) 2017. EITRT 2017. Lecture Notes in Electrical Engineering, vol 482. Springer, Singapore. https://doi.org/10.1007/978-981-10-7986-3_18
Download citation
DOI: https://doi.org/10.1007/978-981-10-7986-3_18
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7985-6
Online ISBN: 978-981-10-7986-3
eBook Packages: EnergyEnergy (R0)