
Abstract
This chapter presents static and dynamic optimization-based models for planning the electric distribution network. Based on a branch flow model, two Mixed-Integer Conic Quadratic Programming (MICQP) convex formulations are proposed to solve the network expansion planning models including high modeling fidelity of the intrinsic interaction of the manifold elements of the networks. The objective of the presented models is to minimize investment and operation costs by optimally deciding on installing new feeders and/or changing existing ones for others with larger capacities, installing new substations or expanding existing ones and, finally, installing capacitor banks and voltage regulators, modifying the network topology. In addition, discrete tap settings of voltage regulators are modeled as a set of mixed-integer linear equations, which are embedded in an ac optimal power flow. The presented MICQP models are convex optimization problems. Therefore globality and convergence are guaranteed. Computational results to verify the efficiency of the proposed methodology are obtained for a 24-node test system. Finally, conclusions are duly drawn.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
- Capacitor banks
- Convex optimization
- Dynamic model
- Electric distribution network expansion planning
- Static models
- Voltage regulators
2.1 Introduction
The rapid increase of renewable power generation connected to electric distribution networks has complicated their operation. Because this operational complexity, it could lead to a high impact on the economic efficiency of networks due to the significant investment costs of new control devices that properly guarantee appropriate levels of security, quality, and reliability at competitive costs. In this vein, optimization tools to solve the Electric Distribution Network Expansion Planning (EDNEP) problem has recently attracted more attention representing a shifting toward feasible-based to optimization-based planning paradigms. It is clear that the use of optimization tools in EDNEP represent substantial gains or savings in planning electric distribution networks. However, it is essential to properly capture the complexity of the non-linear interactions of the manifolds elements and physic laws with high fidelity. This chapter is devoted to this propose presenting convex formulations that could be implemented on off-the-shelf solvers with globality and convergence guarantee.
In its simplest version, the EDNEP problem consists of determining the investments that guarantee an economical and reliable distribution network operation. Technical constraints such as maximum current flows through feeders, maximum power from substation transformers, voltage magnitude limits in nodes and network radiality must be considered [1, 2]. The EDNEP problem can be established as follows: an electric distribution network needs to meet the demands of a fixed number of consumers due to demand growth, hence, it is necessary to carry out expansion planning consisting of: installing new feeders and/or changing existing ones for others with larger capacities, installing new substations or expanding existing ones and finally, installing capacitor banks and voltage regulators. The objective is to minimize the total costs related to those investments and network operation costs, subject to a set of physical, operating and economic constraints [3].
The installation of capacitor banks in electric distribution networks is important, mainly to maintain the voltage magnitude and energy losses within pre-established limits. Their optimal sizes and locations make these improvements feasible [4]. Thus, optimal capacitor bank placement aims at placing and sizing them, minimizing the costs associated with capacitor banks and energy losses. Within this context, another important aspect is the location of voltage regulators [5].
Some works about the EDNEP problem have independently addressed feeder and substation installation [7,8,9,10,11,12,13, 17,18,19,20], allocation of capacitor banks [5, 21,22,23], allocation of voltage regulators [24,25,26], and joint allocation of capacitor banks and voltage regulators [27,28,29,30]. However, the EDNEP problem should focus not only on a single technology–or device–based planning. In this context, an integral EDNEP problem considering a co-optimization of all the above control devices could foster benefits to the electric distribution network by reducing operation costs and losses, increasing flexibility and reliability is proposed.
However, this problem becomes a large-scale mixed-integer non-linear programming (MINLP) problem. The EDNEP problem has been solved using different techniques, such as heuristic and meta-heuristic algorithms and classical optimization techniques [6]. Heuristic algorithms have produced solutions with a relatively low computational effort, like branch-exchange in [7, 8] and the constructive heuristic algorithm in [9]. Meta-heuristic algorithms have also been used, like evolutionary algorithms in [10], genetic algorithms in [11] and [12], ant colony algorithms in [13], simulated annealing algorithms in [14, 15] and particle swarm algorithm in [16]. Although metaheuristics are flexible and achieve good results, they also present many problems, such as a high computational demand, the need for adjusting and fine-tuning the parameters and the definition of a stopping criterion. In addition, they cannot guarantee convergence to a global optimum, or indicate the quality of the final solution, because they do not provide a distance indicator to the optimal solution.
2.2 Time Framework
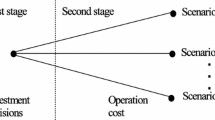
An important aspect to be considered in the optimal EDNEP problem is the decision-making process in the planning horizon. According to [31], the EDNEP problem can be divided into two periods: short-term planning (1 up to 4 years) and long-term planning (5 up to 20 years), leading to two types of EDNEP optimization models, static and dynamic.
In a static model, EDNEP decisions are only made at the beginning of the planning horizon, i.e., at a single point in time, where the load demand data considered remains constant until the end of the planning horizon. This modeling type is known as a single-stage model as well and considers the whole planning horizon in a single period, which is the target period. Since the EDNEP in mainly conditioned by the load demand in the electric distribution network, which usually increases over time, the reference period is usually selected as the last year of the planning horizon.
In a dynamic model, EDNEP decisions are made at different points in time. This modeling type is known as multi-period as well and represents the real behavior of the electric distribution network. In this approach, the planning horizon is divided into different time periods, each one comprising a specific number of years [32, 33].
The advantage of using a static approach for the EDNEP problem is that the resulting model is relatively simple. One of the disadvantages is that the EDNEP is solved for the last year of the planning horizon. Another drawback is that, if the EDNEP problem is solved for a long-term planning horizon, the load demand in the electric distribution network will probably be much higher than the load demand in the short-term. Therefore, the EDNEP will probably result in an oversize of the installed components and higher investments.
2.3 AC Power Flow in Electric Distribution Networks
The analysis of an electric distribution network requires the solution of the power flow problem to calculate the state of the system represented by voltage magnitudes in nodes, current flows in feeders, energy losses and other variables of interest. Therefore, power flow models are widely tools used in the steady-state analysis of the networks. Most ac power flow models in electric distribution networks are based on power-mismatch and current-mismatch formulations either in polar or rectangular formats, mainly using Newton-Raphson algorithms [35]. On the other hand, radial networks are characterized by a high R/X ratio. This renders the load flow problem ill-conditioned. Previous research indicates that standard load flow methods fail to converge in ill-conditioned test systems [36, 37].
In this work, the equations that represent the steady-state of radial networks are obtained from the branch flow model proposed in [38,39,40] as
where constraints (2.1) and (2.2) are the active and reactive power injections; (2.3) describes the forward voltage drop in each line and (2.4) defines apparent power flow injection at the head bus of each line. Equations (2.1)–(2.4) are frequently used in the power flow sweep method of radial networks and can be used to formulate the MINLP model for the EDNEP problem.
Without loss generality, the power flow optimization problem can be formulated using the above steady-state equations of radial networks, including an objective function that minimizes real power loss [27]. The compact form of the non-linear ac power flow problem can be expressed as
where the two last equations are the nodal active and reactive power balancing conditions, respectively.
The optimization problem (2.5) is a non-linear and non-convex in the ac power flow for radial networks due to the quadratic terms in their constraints and objective function. However, the square terms in (2.1)–(2.4) and the objective function in (2.5) can be dropped using auxiliary variables that represent those square terms, \(d_{k} = V_{k}^{2}\) and \(l_{km} = I_{km}^{2}\), and (2.4) can be relaxed to a convex constraint by second order conic programming (SOCP) [41], where it is relaxed to an inequality constraint. The relaxed convex ac power flow problem for radial networks can be expressed as
2.4 Convex Model for the EDNEP Problem
In this section, an optimization model is presented that includes the minimization of investment costs by installing new feeders and/or changing existing ones for others with larger capacities, installing new substations or expanding existing ones and finally, installing capacitor banks and voltage regulators, as well as the timing to add new assets or expand existing ones in case of dynamic (multi-stage) planning, including the operating costs associated with energy loss. Equations related to each device considered are depicted to capture the physical laws that govern them. Then, a convex formulation is derived to build a MICQP optimization problem that benefits from the advances of off-the-shelf MICQP solvers. It is worth to clarify that Mixed-Integer Conic Quadratic Programming (MICQP) problems are non-convex because of the integer nature of some decision variables. However, MICQP resolution algorithms iteratively solve optimization problems where integer variables are fixed. In this case, our problem is convex. Additionally, in this case, MICQP theory guarantees global solution of the optimization problem. For further details about Conic Programming theory, interested readers are referred to [42].
2.4.1 Capacitor Bank Model
In electric distribution networks, there are two types of capacitor banks: (1) Fixed Capacitor Banks (FCB) and (2) Switched Capacitor Banks (SCB) [43], as shown in Fig. 2.1. FCBs are capacitor banks composed of units which, after being installed in the planning stage, are always connected throughout all load levels; whereas, SCBs are composed of units which, after being installed at the planning stage, can be fully or partially connected at every load level. According to Fig. 2.1a, expressions (2.11)–(2.13) model the allocation and operation of FCBs in the networks.

Capacitor bank schemes: a FCB. b SCB
Equation (2.11) represents the reactive power produced by the fixed capacitor banks installed at node k. Constraint (2.12) limits the number of units to be installed in a fixed capacitor bank and (2.13) establishes the integrality condition for the number of units installed.
To model SCBs (Fig. 2.1b), it is important to take into account the load variations in a given period of time, therefore, these equations are modeled considering the time period and can only be included in the dynamic model. Expressions (2.14)–(2.16) represent the SCBs installation and operation.
where (2.14) represents the reactive power produced by the fixed capacitors banks installed at node k. Constraint (2.15) limits the number of units to be installed in a fixed capacitor bank and (2.16) establishes the integrality condition for the number of units installed.
2.4.2 Voltage Regulator Model
To model the voltage regulator, consider an autotransformer with an automatic changing mechanism of the tap position (number of turns) of the series winding to maintain a predetermined level of voltage magnitude along an electric distribution feeder in case of load level variations. Standard voltage regulators contain a reversing switch that enables a regulating range, which determines the tap step-size \(\Delta\) (+ increases and – decreases the voltage magnitude), taking into account the reference voltage magnitude and the maximum number of steps, Ns, as shown in Fig. 2.2, where \(\Delta\) and Ns are known parameters, e.g. 0.00625, 32 steps, respectively, a and tp are the tap setting and tap position, respectively, which are considered variables in the planning and operation of electric distribution networks.

Voltage regulator in operation
Consider the voltage regulator located at node m of branch km, where node x is the non-regulated voltage magnitude node, as shown in Fig. 2.3, where a partial electric distribution feeder with a voltage regulator is shown. The voltage regulator in branch km can be divided into branch kx and branch xm, where branch xm only contains the tap changer and the impedance kx is the same as branch km. With these considerations, similar to DistFlow [38], the injected active and reactive power equations of the voltage regulator can be described as

Feeder with a voltage regulator model
where constraints (2.17) and (2.18) are the active and reactive power injections; (2.19) describes the forward voltage drop in each line, (2.20) defines the apparent power flow injection at the head bus of each line and (2.21) is the voltage magnitude regulated by the voltage regulator. Equations (2.17)–(2.20) can be convexified in a similar form to the ac power flow in Sect. 2.3.
Equation (2.21) can be transformed into several mixed integer linear expressions. In order to do so, the voltage regulator tap-changer is formulated as
where (2.22) is the expression that determines the tap setting, (2.23) computes the tap step-size, (2.24) limits the number of tap positions and states if it is necessary to install a voltage regulator in the electric distribution network and (2.25) establishes the integrality condition to the number of tap positions.
Integer variable \(tp_{km}\) can be expressed by the binary expansion scheme [44] as
where \(\alpha_{kmn} \in \left\{ {0/1} \right\}\). Replacing (2.26) in (2.22), yields
Using the auxiliary variable \(d_{k} = V_{k}^{2}\) in (2.21), one obtains
Multiplying both sides of (2.28) by \(d_{x}\), results in
Defining auxiliary variables \(z_{km} = a_{km} d_{x}\) and \(x_{kmn} = \alpha_{kmn} d_{x}\), one obtains
From (2.29), \(d_{m} = a_{km} z_{km}\), and replacing (2.31) yields
Defining the auxiliary variable \(y_{kmn} = \alpha_{kmn} z_{km}\), one obtains
Auxiliary variables \(x_{kmn}\) and \(y_{kmn}\) are the products of binary and continuous variables, which can be reformulated into an exact linear set of constraints using the big-M method, resulting in
2.4.3 Static Convex EDNEP Model
As previously explained, the static model considers the whole planning horizon in a single target period. In addition, the steady state, capacitor banks and voltage regulators convex formulations previously developed are taken into account. The static convex EDNEP model can be formulated as
where objective function (2.38) represents the annualized investment and operation costs. The first term represents the costs associated with the new feeders installation and/or changing existing ones, the second term represents the costs of installing or expanding substations, the third and fourth terms represent the costs associated with installing fixed capacitor banks and voltage regulators, respectively, and the fifth and sixth terms represent the costs associated with energy losses and substation operation, respectively.
Equations (2.39) and (2.40) represent the active and reactive power balance nodal equations. Equations (2.41) and (2.42) describe the forward voltage drops in each branch while (2.43) defines the apparent power flow injection at the head bus of each branch. The limits of voltage and current magnitudes are established in (2.44) and (2.45). Equation (2.46) accounts for the case when a line with a specific conductor type is already installed, by setting the corresponding binary variable to 1, or the case when a line is already installed but can have its conductor type changed by replacing the inequality sign in the summation of (2.46) with an equality. Equation (2.47), together with power balance constraints (2.39) and (2.40), ensures that the network has a number of trees equal to the number of existing and installed substations. Equation (2.48) indicates substation installation \((S_{k}^{SE0} = 0\;{\text{and}}\;S_{k}^{SE} \ne 0)\) and substation expansion \((S_{k}^{SE0} \ne 0\;\text{and} \;S_{k}^{SE} \ne 0)\) and binary variable \(\alpha_{k}^{SE}\) is related to the substation capacity limit. Equation (2.49) states whether it is necessary to install a voltage regulator in the electric distribution network, i.e.\(\alpha_{km}^{vr} = 1\). Finally, constraints (2.51)–(2.54) represent the binary nature of the variables. The static model in (2.38)–(2.54) is a convex MICQP formulation for the EDNEP problem that guarantees global optimum solutions.
2.4.4 Dynamic Convex EDNEP Model
As previously explained, in the EDNEP dynamic model, the decisions are made at different points in time. In order to do so, the proposed static model in (2.38)–(2.54) can be extended to a dynamic (multi-period) model by adding the period index and some constraints, as
where (2.55)–(2.87) represent the convex dynamic (multi-period) EDNEP problem, which was extended from a convex static EDNEP problem to a study for all time periods. In this problem, constraints (2.79)–(2.81) has added, limiting the pieces of equipment (feeders, substations and voltage regulators) to be installed in a specific branch or node along the planning horizon.
2.5 Numerical Results
2.5.1 Data Specifications
Two cases are used for the solution of the EDNEP problem using the 24-node electric distribution network [45]: (1) a static test case and (2) a dynamic test case. The system considered has 24 nodes, 4 substations, 20 load demand nodes and 34 branches, operating at 13.8 kV. For the static model, the planning horizon considered is 20 years in only one stage. For the dynamic model, the planning horizon considered is 20 years divided into 4 periods of 5 years each. These models have been solved using the CPLEX optimization solver [46] in AMPL [47], in a Dell PC server with 256 GB of RAM memory and 2.27 GHz.
The base topology of the 24-node network is shown in Fig. 2.4. Investment alternatives for substations and conductors, which were adopted from [20], are shown in Tables 2.1 and 2.2. Load demand data for each period is shown in Table 2.3. The costs and data related to the capacitor banks and voltage regulators are adapted from [27]. The location cost of capacitor banks is US$1500, the cost of each module is equal to US$1000, the capacity of each module is equal to 300 kVar. For other hand, the location cost of voltage regulators is equal to US$8400 and 32 steps. The interest rate is set at 13%. The price of energy is equal to $0.25 /kWh, and finally the minimum and maximum voltage magnitude limits are 0.95 and 1.05 pu, respectively.

Base topology of the 24-node electric distribution network
2.5.2 Static Test Case
This case is solved in 6 min 45 s, the objective function found is US$118,321,152. The EDNEP problem is solved taking into account the load demand in the last stage (year 20), but the decisions are made in the first year. The solutions obtained are as follows: substations 23 and 24 are built, feeders 2–12, 4–9, 10–16 and 7–19 are built with conductor type 1, feeders 4–15, 15–17, 1–14, 5–24, 7–23, 10–23, 11–23, 17–22, 18 – 24 and 13–20 are built with conductor type 2 and feeders 1–21 and 6–22 are changed with conductor type 1. In addition, FCB with 1800 kVar are located at nodes 1, 3, 7, 9, 13, 14 and one voltage regulator is located in circuit 4–15 with a tap position of 6. The topology obtained from the optimization process is shown in Fig. 2.5.

Solution topology of the 24-node electric distribution network in static case
2.5.3 Dynamic Test Case
This case is solved in 18 min 23 s, the objective function found is US$55,654,205. In period 1, feeders 4–9, 17–22, 4–16 are built with conductor type 1, while feeders 10–16, 4–15 and 17–22 are built with conductor type 2 and feeder 8–22 is changed with conductor type 1. FCB with 1200 kVar is located at node 1 and FCB with 900 kVar is located at nodes 3, 7, 9 and 5.
In period 2, substation 23 is built and feeders 2–12, 1–14 and 11–23 are built with conductor type 1, while feeders 6–13 and 7–23 are built with conductor type 2 and feeder 1–21 is changed with conductor type 1. FCB with a capacity of 1200 kVar is installed at node 14. In addition, one voltage regulator is installed in branch 4–15 with a tap position of 5.
In period 3, feeder 10–23 is built with conductor type 1 and feeders 7–19, 14–18, and 13–20 are built with conductor type 2. In addition, the voltage regulator installed in branch 4–15 in period 2 changes the tap position to 2.
In period 4, substation 24 is built and feeders 24–18, 24–5 and 24–20 are built with conductor type 1 and feeder 1–9 is built with conductor type 2. In addition, the voltage regulator installed in branch 4–15 in period 2 changes the tap position to 1. The topologies obtained from the optimization process in each period are shown in Fig. 2.6.

Solution topologies of the 24-node electric distribution network in dynamic case: a In period 1. b In period 2. c In period 3. d In period 4
The results found for the static and dynamic test cases show that the solutions obtained using the dynamic model have lower costs than those generated using the static model. This can be explained by the appropriate execution of investments in the dynamic model. Note that the cost difference between the static and the dynamic test cases is US$62,666,947.87, which represents a 47.03% reduction in total investment cost.
References
I.J. Ramirez-Rosado, J.A. Dominguez-Navarro, Possibilistic model based on fuzzy sets for the multiobjective optimal planning of electric power distribution networks. IEEE Trans. Power Syst. 19(4), 1801–1810 (2004)
I.J. Ramirez-Rosado, J.A. Dominguez-Navarro, New multiobjective tabu search algorithm for fuzzy optimal planning of power distribution systems. IEEE Trans. Power Syst. 21(1), 224–233 (2006)
T. Gönen, Electric Power Distribution Systems Engineering (McGraw-Hill, New York, 1986)
S.F. Mekhamer, M.E. El-Hawary, S.A. Soliman, M.A. Moustafa, M.M. Mansour, New heuristic strategies for reactive power compensation of radial distribution feeders. IEEE Trans. Power Delivery 17(4), 1128–1135 (2002)
J.Y. Park, J.M. Sohn, J.K. Park, Optimal capacitor allocation in a distribution system considering operation costs. IEEE Trans. Power Syst. 24(1), 462–468 (2009)
N.C. Sahoo, S. Ganguly, D. Das, Recent advances on power distribution system planning: a stage-of-the-art survey. Energy Syst. 4(2), 165–193 (2013)
K. Nara, T. Satoh, H. Kuwabara, K. Aoki, M. Kitagawa, T. Ishihara, Distribution systems expansion planning by multi-stage branch exchange. IEEE Trans. Power Syst. 7(1), 208–214 (1992)
E. Míguez, J. Cidrás, E. Díaz-Dorado, J. García-Dornelas, An improved branch-exchange algorithm for large-scale distribution network planning. IEEE Trans. Power Syst. 17(4), 931–936 (2002)
M. Lavorato, M. Rider, A.V. Garcia, R. Romero, A constructive heuristic algorithm for distribution system planning. IEEE Trans. Power Syst. 25(3), 1734–1742 (2010)
G. Yang, Z. Dong, K. Wong, A modified differential evolution algorithm with fitness sharing for power system planning. IEEE Trans. Power Syst. 23(2), 514–522 (2008)
V. Miranda, J.V. Ranito, L.M. Proença, Genetic algorithm in optimal multistage distribution network planning. IEEE Trans. Power Syst. 9(4), 1927–1933 (1994)
I. Ramirez-Rosado, J. Bernal-Agustín, Genetic algorithms applied to the design of large power distribution systems. IEEE Trans. Power Syst. 13(2), 696–703 (1998)
J. Gómez, H. Khodr, P. Oliveira, L. Ocque, J. Yusta, R. Villasana, A. Urdaneta, Ant colony system algorithm for the planning of primary distribution circuits. IEEE Trans. Power Syst. 19(2), 996–1004 (2004)
V. Parada, J. Ferland, M. Arias, K. Daniels, Optimization of electrical distribution feeders using simulated annealing. IEEE Trans. Power Del. 19(3), 1135–1141 (2004)
J.M. Nahman, D.M. Peric, Optimal planning of radial distribution networks by simulated annealing technique. IEEE Trans. Power Syst. 23(2), 790–795 (2008)
S. Ganguly, N. Sahoo, D. Das, Mono- and multi-objective planning of electrical distribution networks using particle swarm optimization. Appl. Soft Comput. 11(2), 2391–2405 (2011)
R. Lotero, J. Contreras, Distribution system planning with reliability. IEEE Trans. Power Del. 26(4), 2552–2562 (2011)
S. Ganguly, N. Sahoo, D. Das, Multi-objective planning of electrical distribution systems using dynamic programming. Int. J. Electr. Power Energy Syst. 46, 65–78 (2013)
S.N. Ravadanegh, R.G. Roshanagh, On optimal multistage electric power distribution networks expansion planning. Electr. Power Energy Syst. 54, 487–497 (2014)
R.A. Jabr, Polyhedral formulations and loop elimination constraints for distribution network expansion planning. IEEE Trans. Power Syst. 28, 1888–1897 (2013)
R. Gallego, J. Monticelli, R. Romero, Optimal capacitor placement in radial distribution networks. IEEE Trans. Power Syst. 16(4), 630–637 (2001)
D.F. Pires, A.G. Martins, C.H. Antunes, A multiobjective model for VAR planning in radial distribution networks based on tabu search. IEEE Trans. Power Syst. 20(2), 1089–1094 (2005)
I.C. Silva Junior, S. Carneiro Junior, E.J. Oliveira, J.S. Costa, J.L.R. Pereira, P.A.N. Garcia, A heuristic constructive algorithm for capacitor placement on distribution system. IEEE Trans. Power Syst. 23(4), 1619–1626 (2008)
C.A.N. Pereira, C.A. Castro, Optimal placement of voltage regulators in distribution systems, in Proceedings of IEEE Bucharest Power Tech (Bucharest, Romania, 2009), pp. 1–5
A.S. Safigianni, G.J. Salis, Optimum voltage regulator placement in a radial power distribution network. IEEE Trans. Power Syst. 15(2), 879–886 (2000)
J. Mendoza, D. Morales, R. López, J. Vannier, C. Coello, Multiobjetive location of automatic voltage regulators in radial distribution network using a micro genetic algorithm. IEEE Trans. Power Syst. 22(1), 404–412 (2007)
J.F. Franco, M.J. Rider, M. Lavorato, R.A. Romero, A mixed integer LP model for the optimal allocation of voltage regulators and capacitors in radial distribution systems. Electr. Power Energy Syst. 48, 123–130 (2013)
E.P. Madruga, L.N. Canha, Allocation and integrated configuration of capacitor banks and voltage regulators considering multi-objective variables in smart grid distribution system, in Proceedings of International Conference on Industry Applications (São Paulo, Brazil, Nov. 2010), pp. 1–6
B.A. de Souza, A.M.F. de Almeida, Multiobjective optimization and fuzzy logic applied to planning of the volt/var problem in distributions systems. IEEE Trans. Power Syst. 25(3), 1274–1281 (2010)
J. Sugimoto, R. Yokoyama, Y. Fukuyama, V.V.R. Silva, H. Sasaki, Coordinated allocation and control of voltage regulators based on reactive tabu search, in IEEE Russian Power Tech (St. Petersburg, Russia, 27–30 June 2005), pp. 1–6
H. Fletcher, K. Strunz, Optimal distribution system horizon planning-part I: formulation. IEEE Trans. Power Syst. 22(2), 791–799 (2007)
S. Haffner, L.F.A. Pereira, L.A. Pereira, L.S. Barreto, Multistage model for distribution expansion planning with distributed generation—part I: problem formulation. IEEE Trans. Power Delivery 23(2), 915–923 (2008)
S. Haffner, L.F.A. Pereira, L.A. Pereira, L.S. Barreto, Multistage model for distribution expansion planning with distributed generation—part II: numerical results. IEEE Trans. Power Delivery 23(2), 924–929 (2008)
A. Sorokin, S. Rebennack, P. Pardalos, N. Iliadis, M. Pereira, Handbook of Networks in Power Systems I. Energy Systems (Springer, Berlin, 2012)
J. Tate, T. Overbye, A comparison of the optimal multiplier in polar and rectangular coordinates. IEEE Trans. Power Syst. 20(4), 1667–1674 (2005)
S.C. Tripathy, G.D. Prasad, O.P. Malik, G. S. Hope, Load-flow solutions for ill-conditioned power systems by a Newton-like method. IEEE Trans. Power App. Syst. PAS-101(10), 3648–3657 (1982)
R.A. Jabr, Radial distribution load flow using conic programming. IEEE Trans. Power Syst. 21, 1458–1459 (2006)
M.E. Baran, F.F. Wu, Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Delivery 4, 1401–1407 (1989)
M.E. Baran, F.F. Wu, Optimal capacitor placement on radial distribution systems. IEEE Trans. Power Delivery 4, 725–734 (1989)
M.E. Baran, F.F. Wu, Optimal sizing of capacitors placed on a radial distribution system. IEEE Trans. Power Delivery 4, 735–743 (1989)
M. Farivar, S.H. Low, Branch flow model: relaxations and convexification—part I. IEEE Trans. Power Syst. 28(3), 2554–2564 (2013)
D. Luenberger, Y. Ye, Linear and Nonlinear Programming (Springer, 2008)
R.A. Jabr, Optimal placement of capacitors in a radial network using conic and mixed integer linear programming. Electr. Power Syst. Res. 78, 941–948 (2008)
J. López, D. Pozo, J. Contreras, J.R.S. Mantovani, A multiobjective minimax regret robust VAr planning model. IEEE Trans. Power Syst. 32, 1761–1771 (2017)
I. Gönen, I. Ramirez-Rosado, Review of distribution system planning models: a model for optimal multi-stage planning. IEE Proc. Gen. Trans. Dist. 133(7), 397–408 (1986)
IBM, IBM ILOG CPLEX V12.1. User’s Manual for CPLEX (2009)
R. Fourer, D.M. Gay, B.W. Kernighan, AMPL: A Modeling Language for Mathematical Programming (Duxbury Press, 2002)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
The notations used throughout this chapter are listed below:
2.1.1 Sets
- B:
-
Set of nodes.
- BR:
-
Set of branches.
- C:
-
Set of conductor types.
- FCB:
-
Set of fixed capacitor banks.
- P:
-
Set of periods.
- SE0:
-
Set of existing substations.
- SE:
-
Set of new installed substations.
- SCB:
-
Set of switched capacitor banks.
- VR:
-
Set of voltage regulators.
- \({\mathbf{\mathbb{Z}}}^{ + }\) :
-
Set of positive integer numbers.
2.1.2 Parameters
- \(a_{km}^{\hbox{max} } ,a_{km}^{\hbox{min} }\) :
-
Upper and lower tap settings of voltage regulator in branch km.
- \(C_{km,c}^{C}\) :
-
Installation cost of branch km using conductor type c (US$).
- \(C_{k}^{SE}\) :
-
Installation cost of new substation k (US$).
- \(C_{k}^{SER}\) :
-
Expanding cost of substation k (US$).
- \(C_{k}^{FCB}\) :
-
Installation cost of fixed capacitor bank in node k (US$).
- \(C_{k}^{SCB}\) :
-
Installation cost of switched capacitor bank in node k (US$).
- \(C_{km}^{VR}\) :
-
Installation cost of voltage regulator in branch km (US$).
- \({\text{C}}_{loss}\) :
-
Real power loss cost (US$).
- \(C_{k}^{OS}\) :
-
Operating cost of substation k (US$).
- \(I_{km,c}^{\hbox{max} }\) :
-
Upper current limit from conductor type c in branch km (pu).
- \(K_{L}\) :
-
Interest rate for branches.
- \(K_{S}\) :
-
Interest rate for substations.
- \(K_{C}\) :
-
Interest rate for capacitor banks.
- \(K_{VR}\) :
-
Interest rate for voltage regulators.
- \(L_{km}\) :
-
Length of branch km (km).
- M :
-
Large positive number.
- \(N_{k}^{fcb}\) :
-
Maximum number of fixed capacitors in installed bank k (pu).
- \(N_{k}^{scb}\) :
-
Maximum number of switched capacitors in installed bank k (pu).
- \(Ns_{km}\) :
-
Total number of steps of voltage regulator in branch km.
- \(P_{k,t}^{D}\) :
-
Active power demand at node k in period t (pu).
- \(Q_{k,t}^{D}\) :
-
Reactive power demand at node k in period t (pu).
- \(Q^{fc}\) :
-
Rating of fixed capacitors (pu).
- \(Q^{sc}\) :
-
Rating of switched capacitors (pu).
- \(R_{km,c}\) :
-
Resistance per length of conductor type c installed in branch km (pu).
- \(S_{k}^{SE0}\) :
-
Maximum apparent power capacity of existing substation k (pu).
- \(S_{k}^{SE}\) :
-
Maximum apparent power capacity of newly installed substation k (pu).
- \(V_{k}^{\hbox{min} } ,V_{k}^{\hbox{max} }\) :
-
Lower and upper voltage magnitude limits in substation k (pu).
- \(X_{km,c}\) :
-
Reactance per length of conductor type c installed in branch km (pu).
- \(\Delta_{km}\) :
-
Tap step-size of voltage regulator in km.
2.1.3 Decision Variables
- \(d_{k,t}\) :
-
Auxiliary variable containing \(V_{k,t}^{2}\).
- \(l_{km,c,t}\) :
-
Auxiliary variable containing \(I_{km,c,t}^{2}\).
- \(n_{k,t}^{fc}\) :
-
Integer variable associated with the number of fixed capacitors installed in a bank in node k in period t.
- \(n_{k,t}^{sc}\) :
-
Integer variable associated with the number of switched capacitors installed in a bank in node k in period t.
- \(P_{k,t}^{SE}\) :
-
Active power from substation k in period t (pu).
- \(P_{km,c,t}\) :
-
Active power flow by branch km conductor type c in period t (pu).
- \(Q_{k,t}^{SE}\) :
-
Reactive power from substation k in period t (pu).
- \(Q_{km,c,t}\) :
-
Reactive power flow by branch km conductor type c in period t (pu).
- \(q_{k,t}^{fcb}\) :
-
Reactive power injection from fixed capacitor bank in node k in period t (pu).
- \(q_{k,t}^{scb}\) :
-
Reactive power injection from switched capacitor bank in node k in period t (pu).
- \(\alpha_{km,c,t}^{C}\) :
-
Binary variable associated with installing and/or changing of branch km using conductor type c in period t.
- \(\alpha_{k,t}^{SE}\) :
-
Binary variable associated with installing of a new substation k in period t.
- \(\alpha_{k,t}^{SER}\) :
-
Binary variable associated with expansion of substation k in period t.
- \(\alpha_{km,t}^{vr}\) :
-
Binary variable associated with installing of voltage regulator in branch km in period t.
- \(\alpha_{km,t}\) :
-
Variable used in the calculation of the voltage magnitude drop of branch km in period t.
- \(\beta_{km,t}\) :
-
Binary variable associated with radiality in branch km in period t.
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
López, J., Pozo, D., Contreras, J. (2018). Static and Dynamic Convex Distribution Network Expansion Planning. In: Shahnia, F., Arefi, A., Ledwich, G. (eds) Electric Distribution Network Planning. Power Systems. Springer, Singapore. https://doi.org/10.1007/978-981-10-7056-3_2
Download citation
DOI: https://doi.org/10.1007/978-981-10-7056-3_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7055-6
Online ISBN: 978-981-10-7056-3
eBook Packages: EnergyEnergy (R0)