
Abstract
The WMNs are coming up as a new networking trend for setting up a wireless networking infrastructure in metropolitan areas. Network operators prefer WMN because of easy installation and fast deployment of it. It may also result in reduction of monetary investment and cost of operation. The routing in WMNs is challenging task because of the unpredictable variations in the wireless environments. In this paper, three routing protocols, AOMDV, MOLSR, and MHRP, are compared in terms of their performance in WMN.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others



Keywords
1 Introduction
The wireless mesh network (WMN) brought new opportunities and challenges, because of its dynamically self-organized and self-configured network. Generally, a WMN can be regarded as a set of wireless nodes which communicate with each other and forward each other’s packets [1]. The nodes of a WMN are classified as mesh router or mesh client. Each node in the network is not only a host but also works as a router. It can forward the packets on behalf of other nodes that may be beyond the direct wireless communication range of their destinations.
A WMN is dynamic in nature with self-organizing and self-configuring the nodes, thus establishing and maintaining mesh connectivity automatically among the nodes. According to F. Akyildiz et al., these features provide many benefits of using WMNs like lower setup cost, simple network management, fault tolerant, and reliable service coverage. Figure 1 illustrates the architectural view of a typical wireless mesh network.

Wireless mesh network comprising several stationary and mobile clients to the Internet [9]
The routing algorithm used is a main aspect affecting the performance of a network. A number of single-path and multipath routing algorithms have been proposed for WMN. The important goal of multipath routing is to incorporate balancing of load and to achieve higher degree of fault tolerance. A number of paths are chosen between two communicating nodes. The packet flow is allowed through any one path. When a link becomes faulty on a path owing to a poor channel state or mobile conditions, next path is opted from the group of remaining paths [1].
The present paper studies the comparative performance of three multipath routing protocols namely AOMDV, MOLSR, and MHRP on the basis of different parameters. The rest of the paper is arranged in the following manner. The next section overviews the multipath routing in WMN. The third section elaborates the features of different multipath routing protocols. The section four discusses the results obtained after simulation, and section five contains conclusive comments.
2 Multipath Routing in WMN
A WMN is built with two kinds of nodes called as mesh router and mesh client. The locations of mesh routers are fixed, but mesh clients can change their locations and connect to network over other mesh routers and clients. S. Xuekang et al. investigated that in addition to performing the routing capability of a traditional wireless router for gateway/repeater functions, a mesh router node exhibits extra routing functions to enable mesh connectivity.
The multipath routing makes use of the resources of core network by setting up many paths between source–destination pair. The motives behind using it include utilization of bandwidth, optimizing latency, making the network fault-tolerant, building reliability and equal load distribution. The purpose of using multipath routing is to employ the various valid routes to arrive at destination and not just the most suitable path. But the control overhead incurred in establishing these multipaths should be optimal [2].
The three phases of multipath routing are path exploration, traffic distribution, and path maintenance. The path exploration phase determines the existing paths for a node pair. During the traffic distribution phase, the number of paths for distributing traffic is selected. Path maintenance is responsible for generating paths again after exploring the initial path. It can be started either after the failure of one path or after the failure of all the paths [3].
-
A.
Path Exploration
Path exploration is the mechanism of finding out the existing path set for a given sender and receiver node. There are numerous issues which a protocol should take into consideration while deciding the subset of available paths it tends to generate in the exploration process.
The one of the important issue here is that generated paths should be disjoint, which dictates the path independence in terms of shared resources.
-
B.
Traffic Distribution
There are a number of methods for allocating traffic to existing paths. A multipath protocol may choose to transmit the traffic using only the best path while keeping other explored paths as backups or using the paths in parallel. A pathfinding algorithm chooses a subset of available paths on the basis of a specific attribute of the paths. For instance, no. of hops is being used widely as a metric for a long time. Some other possible metrics are path reliability, path disjointedness, free bandwidth, degree of route interdependence, etc.
-
C.
Path Maintenance
Path maintenance can be stated as the mechanism of recreating the paths after the initial path discovery. Due to the resource constraints of the nodes, paths are highly error prone. Therefore, there should be mechanism for path reconstruction to reduce performance degradation.
The path discovery can start in three following situations: failure of an active path, failure of all active paths, or failure of a subset of paths.
3 Multipath Routing Protocols
The primary aim of routing protocol is to choose the route from sender to receiver node. The protocol should be reliable, quick, and with less overhead. Some multipath protocols constantly supervise and keep track of quality or overall QoS metric of existing paths by using dynamic maintenance algorithms. The multipath Routing protocols can be classified as reactive, proactive, and hybrid [4].
-
A.
Reactive Protocols
The paths are created only when desired by the source node. Some of the reactive protocols are:
-
AODV-based decoupled multipath (AODV-DM)
-
AODV-backup routing (AODV-BR)
-
Ad hoc on-demand multipath distance vector protocol (AOMDV)
-
Multipath dynamic source routing (MP-DSR)
-
Split multipath routing (SMR)
-
AOMDV protocol works on the basis of distance vector and routes on step-by-step basis [5]. Moreover, AOMDV discovers multiple paths on request using a single pathfinding technique.
The route request (RREQ) propagates from the sending node to the receiving node and set up many return paths both at middle nodes as well as at the receiving node. Multiple route replies (RREPs) traverse back these reverse paths in order to construct multiple forward paths to the destination at the source and middle nodes. AOMDV also assigns alternate paths to middle nodes as they are considered to be helpful in minimizing route exploring frequency [5].
The main concept of the AOMDV protocol is to make sure that discovered multiple paths are disjoint and free from loop and that such paths are efficiently found using a flood-based routing method. Perkins et al. [6] proposed that AOMDV protocol depends to a large extent on the routing information which already exists in the under considered AODV protocol, thus reducing the delay resulted in finding multiple paths.
-
B.
Proactive Protocols
Routing information is stored in one or more tables at every node within the network. The multipath optimized link state routing protocol (MOLSR) is a proactive protocol that tries to produce reduced delay and data loss by employing multiple path routing [7]. Xuekang et al. [2] investigated that OLSR restricts broadcasting by using multipoint relays and multipoint relay selectors. In MOLSR, multiple routes are found out and top two routes are selected as per the link metrics specified. The routes having two or more identical nodes are not taken into consideration.
MOLSR introduces the concept of cross-layer and the node discovery algorithm which is used to find out every node on the path in order to bypass disjoint path. The purpose of it is to reduce delay and packet drop ratio [7].
-
C.
Hybrid Protocol
The hybrid routing protocols combine both proactive and reactive routing protocols. One of the main hybrid protocols for wireless mesh networks is multipath hybrid routing protocol (MHRP), where multipath is used to provide the backup mechanism [8]. MHRP has four building blocks:
-
Intra-Region Routing Protocol—IRRP
-
Router Infrastructure Routing Protocol—RIRP
-
Region Gateway Routing Protocol—RGP
-
Route Maintenance
-
As paths in the infrastructure mesh are comparatively fixed, RIRP is a proactive-based protocol. IRRP is a member of reactive routing protocols group that provide increased pathfinding and maintenance services using local communication inside the particular regional scope. The Region Gateway Protocol (RGP) [8] facilitates the routes between two ad hoc regions.
Before sending the data to a destination node, a node inquires if there exists a route to destination; if the route is absent, the node initiates the route exploration phase. The route exploration is performed in three stages: route request, route setup, and route response.
Siddiqui [8] stated that MHRP is a hybrid approach as it adopts both proactive and reactive methods in discovering the routes. Being a secure multipath routing protocol, MHRP reduces the control overhead arising out of it to a great extent by employing a simple mutual authentication mechanism [9, 10].
4 Simulation Environment
-
A.
Experimental Setup
The simulation is done to analyze the performance of WMN routing protocols for selected evaluation parameters using NS2. The network simulator NS2 V 2.34 was used for simulation study. The network was simulated with 10, 20, 30… 40 nodes using square grid topologies for each experiment conducted. All nodes were distributed within the area of 1493 m × 734 m. The first node was configured as source, while the last node was configured as destination. The size of data payload was 512 bytes. The traffic type was constant bit rate type traffic.
A simulated WMN having 30 mesh nodes randomly deployed over 1493 m × 734 m region is shown in Fig. 2.
Fig. 2 
WMN topology having 30 nodes with random placement using NS2
The three protocols AOMDV, MOLSR, and MHRP are simulated using this simulation setup. The details of simulation parameter are given in Table 1.
Table 1 Simulation parameters In this simulation study, selected routing protocols are simulated for following four evaluation parameters:
-
End-to-End Delay: The delay of a network enumerates the latency it takes for a bit of data to traverse the network from one node or endpoint to another.
-
Throughput: It is the number of packets that were delivered during a specified time period.
-
Packet delivery ratio: It is known as the ratio of the numbers of packets successfully arrived at a receiving node to the total number of packets sent by the sending node.
-
Packet loss ratio: If one or more transmitted packets fail to reach at their destination, it is called as packet loss. The packet loss ratio denotes the percentage of transmitted packets that failed to reach the intended destination.
-
-
B.
Result and Discussion
Comparison of reactive, proactive, and hybrid protocol is performed using the measured parameters.
This simulation of AOMDV, MOLSR, and MHRP protocols was performed for four different evaluation parameters namely end-to-end delay, packet loss ratio, throughput, and packet delivery ratio.
The performance of protocols was analyzed for varying simulation time, and resulting values of throughput, end-to-end delay, packet loss ratio, and packet delivery ratio were measured for each protocol.
The results for throughput, packet loss, packet delivery ratio, and end-to-end delay versus time are shown in Figs. 3, 4, 5 and 6, respectively.
Fig. 3 
Comparison of AOMDV, MOLSR, and MHRP for time versus throughput
Fig. 4 
Comparison of AOMDV, MOLSR, and MHRP for time versus packet loss
Fig. 5 
Comparison of AOMDV, MOLSR, and MHRP for time versus packet delivery ratio
Fig. 6 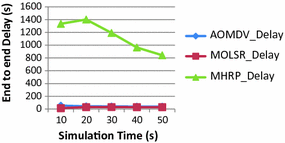
Comparison of AOMDV, MOLSR, and MHRP for time versus delay





5 Conclusion
In this paper, performance of three multipath routing protocols for wireless mesh networks, namely AOMDV, MOLSR, and MHRP, has been compared. Simulations were performed using NS2 in different random topologies. The results show that AOMDV protocol provides better result than MOLSR and MHRP for packet delivery ratio, throughput, and packet loss for the given simulation environment. However end-to-end delay of MOLSR is partially better than AOMDV and much better than MHRP. We can conclude that AOMDV performs better as compared to other two protocols for a WMN consisting of 10–30 nodes spread across the given area. Our future work includes the enhancement of AOMDV by improving the security features of it.
References
Akyildiz, F., Wang, X., Wang, W.: Wireless mesh networks: a survey. Comput. Netw. 47, 445–487 (2005)
Xuekang, S., Wanyi, G., Xingquan, X., Baocheng, X., Zhigang, G.: Node discovery algorithm based multipath olsr routing protocol. In: International Conference on Information Engineering, pp. 139–142. (2009)
Manoj, B.S., Rao, R.R.: Wireless mesh networks: issues and solutions. In: Wireless mesh networking: architecture, protocols and standards. Auerbach Publications, (2007)
Ghahremanloo, P.: Multi-path routing challenging single-path routing in wireless mesh networks. In: International Siberian Conference on Control and Communication, pp. 12–15. (2011)
Das, M.M.: On-demand multipath distance vector routing in Ad Hoc networks. In: 9th International Conference on Network Protocols, (2001)
Perkins, C., Belding-Royer, E., Das, S.: Ad hoc on demand distance vector (AODV) routing. IETF, RFC 3561, (2003)
Valarmathi, K., Malmurugan, N.: Multi path routing protocol for improving reliability in IEEE 802.16 wireless mesh networks: In: International Conference on Trendz in Information Sciences and Computing, pp. 116–121. (2011)
Siddiqui, M.S., Amin, S.O., Kim, J.H., Hong, C.S.: MHRP: a secure multi-path hybrid routing protocol for wireless mesh network. In Military Communications Conference, pp. 1–7. (2007)
Zhang, W., Wang, Z., Das, S.K., Hassan, M.: Security Issues in Wireless Mesh Networks. In: Wireless Mesh Networks: Architectures and Protocols, Springer, (2008)
Network Simulator-ns 2 URL: http://www.isi.edu/nsnam/ns
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sati, M., Aswal, M.S., Dimri, A. (2018). Comparative Performance of Multipath Routing Protocols in Wireless Mesh Network. In: Lobiyal, D., Mansotra, V., Singh, U. (eds) Next-Generation Networks. Advances in Intelligent Systems and Computing, vol 638. Springer, Singapore. https://doi.org/10.1007/978-981-10-6005-2_14
Download citation
DOI: https://doi.org/10.1007/978-981-10-6005-2_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-6004-5
Online ISBN: 978-981-10-6005-2
eBook Packages: EngineeringEngineering (R0)