
Abstract
Due to the stringent resource constraints and highly application-specific nature of Wireless Sensor Networks designing efficient routing protocol is a big challenge. The Collection Tree protocol based on Trickle algorithm was proposed as routing protocol for WSN. Further, several improved variants of CTP were proposed to enhance routing efficiency and R-CTP is one among them. In this paper, performance evaluation of R-CTP is presented using Castalia Simulator against chosen performance parameters. Further, this paper proposes some improvements to R-CTP to enhance performance in terms of number of transmitted packets and latency parameters. Simulation results presented in this paper show that, proposed improvements to R-CTP yields improvement in overall performance, 12% increase in transmitted packets, and 2% improvement in Latency respectively. The paper is concluded with mentioning of future directions for research.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others



Keywords
- Collection tree protocol (CTP)
- Rainbow collection tree protocol (R-CTP)
- Wireless sensor networks (WSNs)
1 Introduction
The Wireless Sensor Networks (WSNs) support sensing the environments, processing the data, and collecting the data from the large number of nodes. The WSN finds wide range of applications in industry, defence, and home automation. The WSN is characterized by stringent resource constraints. Such stringent resource constraints make design and implementation of WSN very difficult. Routing has been an important issue to be addressed in WSN. The aim of the routing is to deliver the packets in multi-hop communication to the destination while increasing network performance. WSN topology can be classified mainly as flat and hierarchical. Many routing protocols have been proposed for addressing routing issue in both types of topologies. Collection Tree Protocol (CTP) has been one among the routing protocols. CTP uses the Trickle algorithm to make best use of the cost and more flexible. CTP is based on the spanning tree concept supporting many-to-one routing. The available results for CTP showed that CTP has been, so far, performing better than any other contemporary protocol during its proposal. CTP achieves mainly four goals: robustness, reliability, hardware independency, and efficiency.
The CTP makes use of Four-Bit Link Estimator to find the link to the parent node. The data is transferred to the next node based on a parameter called Expected Transmission Count (ETX). ETX measures the link quality between pair of nodes. The path for data transmission between source and destination will decided be based on the ETX value calculated for that path. Several improved versions of CTP were proposed for enhancing the performance of CTP among which R-CTP is also the one. The work presented in this paper aims to evaluate the R-CTP performance and improve the same suitably.
In this regard, this paper is structured as follows. Section 2 discusses about the related work of CTP and its variants. The Sect. 3 presents the simulation results of R-CTP and evaluates its performance, Sect. 4 propose some improvements to existing R-CTP, Sect. 5 presents simulation results for proposed improved version of R-CTP, and Sect. 6 presents the analysis of simulation results. The paper is concluded in Sect. 7 along with mentioning of directions for future research work.
2 Related Works
Routing has been an issue of paramount important, be it in a wired or wireless networks with limited or unlimited power. There had been many works in the past related to the routing in networks. Routing in WSN also has seen many such research proposals. The R-CTP is the Enhanced version of Collection Tree Protocol which is described in [1]. The CTP suffers from the poor performance and deployment issues as indicated in reports showing around 2–68% wide range of performance variations [4]. CTP Neo [4] has been proposed to with two mechanisms, one is data path validation and four-bit link estimator which is discussed is in [4]. CTP-TICN here has done some changes in link estimation calculation; it provides load balancing and it uses EETX instead of ETX which is discussed in [5]. POCTP is based on the definition of Pareto optimal route that it has been evaluated by using hierarchical Petri Net modelling technology which is presented in [6]. ICTP is based with long path good link quality and short path with weak link and it decrease the reliability in one side and avoids congestion and improves the reliability discussed in [7]. BCTP enhances CTP by enabling the nodes to balance the traffic to reduce the energy [8]. BCTP is balanced version of CTP; it avoids the traffic by enabling the network and this is discussed in the paper [8]. WSN are mainly application-specific, an attempt to propose the application-specific protocol architectures for communication in WSN had been presented in [9, 10]. Negotiation-based approaches for data aggregation are proposed in [11] whereas Directed Diffusion, a particular data aggregation method, is presented in [12]. Energy metrics based, chain-based, and tree-based data aggregation approaches are discussed in [13,14,15] respectively. Similar works were proposed in [16, 17]. Additionally, the performance comparison of LEACH, CTP, and ECTP using Castalia Simulator is presented in [18]. Some improvements to CTP have been proposed in [19, 20]
However, a detailed performance evaluation of R-CTP with CTP and other related variants has not been presented, so far. Additionally, as indicated in Sect. 3, there have been some disadvantages with R-CTP performance.
Thus, motivation of this paper happens to evaluate the performance of R-CTP with CTP and other related variants of CTP and improve some of the disadvantages of R-CTP using Castalia Simulator.
3 Performance Analysis of R-CTP, CTP and Other CTP Variants
The simulations of improved R-CTP, original R-CTP, CTP and other variants of the CTP are carried out using the Castalia simulator [21] for WSNs and BANs. Castalia [21] provides a generic platform “first order validation of an algorithm before moving to an implement on a specific platform” [21]. The Castalia simulator runs on the top of the OMNeT++ [21]. The proposed objectives are implemented and evaluated its performance. We have used Castalia 3.2 version for the simulation which is built upon the OMNeT++ 4.4.1 version.
The simulation has been run for 300 s for 100 static and homogenous nodes. The simulation is run for several steps to get clear results. Packet drop analyzed for last 10 packets sent to the node in the past. Remaining other factors are unaltered. These various parameter results are taken for topologies of various size ranging from 10 to 100 nodes. The performance evaluation considered following major parameters: energy Consumed in joules (J), application level latency in milliseconds (ms), number of transmitted packets, number of duplicates packets (retransmissions), number of transmitted and received beacons, Rx Breakdown, and data delivery ratio and CTP data.
The authors of this paper have implemented the R-CTP using Castalia Simulator for the purpose of evaluating its performance with CTP and other CTP variants like E-CTP and the ones proposed in [19, 20] (Fig. 1).

Energy consumed in the R-CTP and CTP variants
By collecting the data from the simulator we plotted the data in the graphs and analyzed the performance of R-CTP with the other CTP variants
-
A.
Consumed Energy: In the R-CTP, when the node size is very less the energy consumed is very less. As the number of the node increases, that energy consumed graph will become stable. When compared to the other variants, the R-CTP has less energy consumption, which is shown in the Fig. 2. Due to the less computation of the nodes AETX, it does not take the more energy consumption.
Fig. 2 
Transmitted packets in the R-CTP and CTP variants
-
B.
Transmitted Packet: The number of data and control packets by the R-CTP is comparatively very high compared to the other. The ECTP has the next highest values of transferring the packets. Because of finding the ATEX, it will transfer more packets and reduce the overhead of transferring. The transmitted packets in R-CTP and other CTP variants are shown in the Fig. 3.
Fig. 3 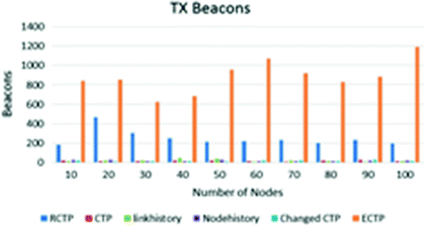
TX beacons in the R-CTP and CTP variants
-
C.
TX and RX Beacons: In the TX Beacons the ECTP [2] has the more TX beacons. While compared to other variants, the ECTP will increase the TX beacons rate and R-CTP is also in the same proportional but it has very less TX beacons with respect to the ECTP. In the RX beacons, ECTP has more stable when the nodes are very less, it gradually decreases with increase in the numbers. R-CTP is initially in small numbers, and it increases with increase in the number of nodes. TX and RX beacons are shown in the Figs. 3 and 4.
Fig. 4 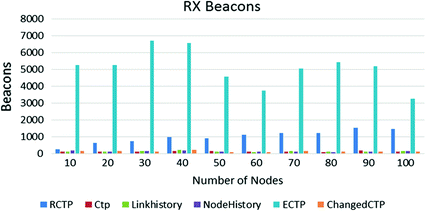
RX beacons in the R-CTP and CTP variants
-
D.
Data Delivery Ratio: The data delivery ratio in the R-CTP very less in the node size is very less, as the number of the nodes increases the data delivery ratio also increases. Figure 5 shows that the data delivery ratio in R-CTP and CTP variants. This is due to the new way of finding the parent selection that will perform the more data delivery ratio.
Fig. 5 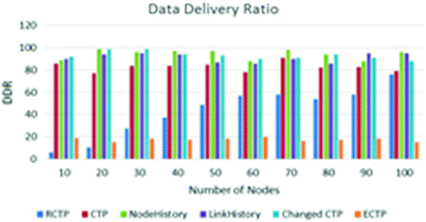
Data delivery ration in R-CTP and CTP variants
-
E.
Duplicates: The duplicate packets in the R-CTP is very less. With compared to other R-CTP has the least in the observed graph. Because as the number increases the value of link metric might be same and there may be chances of the receiving multiple packets, these leads to confusion in the network. The comparison shown in Fig. 6.
Fig. 6 
Duplicate packets in the R-CTP and CTP variants
-
F.
Latency: From Fig. 7, the Application level latency is the less in the case of R-CTP during the number of nodes are less. The latency is high in the all the variants where the (200, inf). In that situation the ECTP as the less compared to the R-CTP. When the nodes size is below 200, R-CTP has less application level latency. The latency is less in the case of R-CTP due there is no much calculations in the finding the AETX on the R-CTP.
Fig. 7 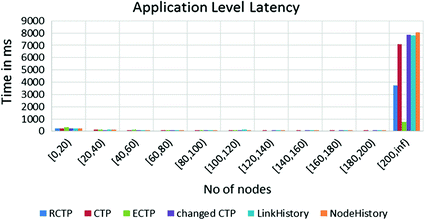
Latency in R-CTP and CTP variants






4 Proposed Work
By evaluating the above graphs we came to know that it can be enhanced further by improving some of its disadvantages mentioned in Sect. 3. The observed disadvantages and proposed solutions to overcome the same have been presented as given below:
-
A.
Removing bad entries from the 1-hop distance: When a node gets a routing frame, it should update the routing table for efficient transmission of packets with the latest routing address. When the values of AETX changes frequently, the R-CTP must send the broadcast frame as soon as to notify the other nodes. The parent fields acts like a substitute for the single-hop destination of a data packet: if the child’s AETX is below the parent it detects automatically by parent. When this hears the child advertise an AETX below of its parent, then it should schedule routing frame for the future transmission.
In this routing table of R-CTP it stores the some address such as invalid address, current node address, address of neighbour’s node which leads to the lots of confusion during the transmission of data packet to the nearest AETX node. By this problem, we are eliminating the bad entries in the routing table, i.e., unnecessary address from the table. So that we can find the address very efficiently. In this we are storing the only current address of nearest AETX of a node. By updating this we reduced the routing time of the packets to the nearest node with best AETX. By using this, we can reduce the energy consumption and the latency in the R-CTP.
-
B.
Improved parent selection method: In R-CTP, the link quality metrics is calculated by AETX. Here we just changed with the parent selection in R-CTP [1]. The parent selection procedure is repeated till it finds inconsistency in the network when a node receives a beacon to reconsider the topology. It may be neighbour comes out from congestion mode or parent may be unreachable.
Here we are improving the parent selection of existing method. In this, we are interested to find the less values of the parent. Here we are calculating the value of the actual link parent and link of the parent that is AETX. After this we are comparing both values which the parent value will assign. As the link values are smaller, the distance between sender and parent is smaller. Hence it is get the nearest node for forwarding the data packet. Due to modification of the parent selection, we are getting nearer parent and increasing in the number of packets.
-
C.
Improved method for loop avoiding in the Link Estimator: The accurate link quality estimation is very important task in the routing. The poor link estimate may cause a 200 or more percentage of failure in the communication or slowdown the network. The link estimation is more of a headache in the development to find the exact link that can communicate efficiently. The four-bit link estimator provides the four bit of information: 1 bit from the physical layer, 1 bit from link layer and 2 bits from the network layer.
In the physical layer we can find the channel quality during a packet. The link layer, we can measures whether the packet is delivered or acknowledged. From the network layer we can check the links are more important for the higher layer performance.
In the link estimator, we are removing the loop that cause for the increasing in the latency. By removing the unnecessary loops which to find the link estimation of next nodes. By optimizing the links of the link estimator we can reduce the energy consumption in the system that can take long time and power for the finding the link. Thus we can find the link for the next nearest node; because of this we are good to reduce the latency and energy factor also.
-
D.
Improved EETX for the new Beacon estimation: A collection tree protocol builds and then maintains minimum cost trees to nodes which make them as tree roots. This protocol is address-free: if there are multiple base stations, it sends one with minimum cost without knowing that it is the address. This protocol basically broadcast the control beacons at a regular fashion, i.e., at fixed interval. When the cost drops the beacon interval is reset by the CTP. This is not mandatory for the correctness.
The improvement of EETX, here we find the nearest node values of EETX. The EETX is expected number of transmissions. Here we are use random numbers. The random number is given to the new beacon estimation for the new node which is to interfere. From this, the fast response from the beacon can assign the new value of EETX. On finding the new value of EETX for the new beacon, we can get more number of TX and RX beacons.
5 Simulation Results of Proposed Improvements
The simulation is carried out using the Castalia Simulator, the parameter are kept same as the existing simulation as described in the Sect. 3. Here the authors are defined the some changes to protocol that are described in the Sect. 4 and executed the simulation.
The simulation has been run for 300 s for 100 static and homogenous nodes. The simulation is run for several steps to get clear results. Packet drop analyzed for last 10 packets sent to the node in the past. Remaining other factors are unaltered. These various parameter results are taken for topologies of various sizes ranging from 10 to 100 nodes. The performance evaluation considered following major parameters: energy Consumed in joules (J), application level latency in milliseconds (ms), number of transmitted packets, number of duplicates packets (retransmissions), number of transmitted and received beacons, Rx Breakdown, and data delivery ratio, and CTP data.
6 Evaluation of the Improved Results
-
A.
Energy Consumed in Improved R-CTP and other CTP Variants: The total network life time can be calculated till the network is fully functional, i.e., total time till which all the nodes in the network works or until the first node runs out of power. Estimating the energy consumption is a vital key in the network; so it is essential in each node. Figure 8 shows the energy consumed by the improved version of R-CTP and R-CTP and other CTP variants. The energy consumed by each node in the system is calculated in the variant of improved R-CTP is ranging from 20.393–20.388. This shows the gradual decrease in the energy content decrease in the nodes as the number of nodes increases gradually. This is due to the removing of the bad entries in the 1 hop distance and loop avoidance in the link estimator, so there is no more need of extra calculation in finding the address of the nearest nodes.
Fig. 8 
Energy consumed in improved R-CTP and R-CTP and other variants

-
B.
Transmitted Packets: The transmitted packets refers to the both data packets and the control packets. The packets refer here the amount of traffic on each node in the network it relays. Figure 9 shows the comparison improved R-CTP and other CTP variants. The comparison shows the large number of transmission of packets, which is about 12% more transmits the packets compare to the original R-CTP. The increasing in the number of transmitting packets is due to the improved parent selection method. Here we described that it finds the good neighbour with least cost of parent. As the number of link metric is less the parent is nearer to the sender.
Fig. 9 
Transmitted packets in the improved and other CTP variants

-
C.
Improved R-CTP RX & TX Beacons: The transmission and receiver of the beacons are used to hear the in the application layer to identify the localization. On improving the R-CTP by above factors, we got the massive increase in the RX beacons. Figure 10 shows the TX beacons initially start with low value to the less number of nodes. As the number of nodes increasing gradually, the improved version of R-CTP increase the number of TX beacons heavily. In the other case Fig. 11. RX beacons it also increase with straight line with the number of nodes increase frequently. This is due to the new method for the new beacon estimation; here we are calculating the new EETX value. These values will find the new beacons that will find when the new node interface.
Fig. 10 
Improved RTCP TX beacons
Fig. 11 
Improved R-CTP RX beacons


-
D.
Data Delivery Ratio: The data delivery ratio (DDR) parameter reports the number of packets transfer of the packets effectively in the network. DDR is a ratio of successful data packets received to the attempted packets transmitted. Figure 12 shows the DDR with different protocols. The improved R-CTP gradually increases in the packets as the number of nodes increases. In the case of R-CTP the number of DDR is more compared to the improved version. The improved is not as bad as original but it is the equal proportional in the DDR content.
Fig. 12 
Data delivery ratio
-
E.
Duplicates (Retransmission): The duplicate packet means the twice or more than a same packet received at the receiving host. It is not good that it gets more duplicate packets. As it gets more duplicate, the application might think it as fresh packet and which may feel in the confusion. Figure 13 shows the duplicates that have little more duplicate packets on improved version compared to the R-CTP. When we optimizing the parent selection it may be confusing due to the selection of parents when the value of the link metric is close and the number of nodes are more. This might may leads to increase in the duplicates.
Fig. 13 
Duplicates
-
F.
Application Level Latency: The latency of the application level refers to the amount of time taken to the packet to reach from the source to the destination. It is very critical impact that when a node is travelling from one node to another in the alarm-based application. In many cases, we trade off in minimizing the source sink delay and energy simultaneously. Figure 14 shows the application level latency of the different protocols , where in the improved version of R-CTP is 2% less of R-CTP. Due to the loop avoiding in the link estimator, it will not find the more time and less computation, so the latency will be reduced. The protocol is very efficient when compared to the other variants CTP .
Fig. 14 
Application level latency
-
G.
Packet Breakdown: The received packets breakdown can be influenced by variety of factors that is interference of other nodes, sensitivity of the packet, and environment factors. This metric refers to the number of packets that are failed or received by each node respectively with and without interference, failed below sensitivity. Figure 15 shows the RX packet breakdown. The breakdown is shows in the improved version of R-CTP.
Fig. 15 
RX packet breakdown of improved R-CTP




To summarize this, the proposed improved variants of R-CTP to improve the number of transmitted packets by 12% and the latency is reduced by the 2%. The energy consumption factor is reduced by some factors is shown in the graph. And additionally we proposed to improve the other factors such as energy consumption, TX and RX factors, breakdown situations and number of received packets.
And we respect the overall performance which here we observed of the different parameters of R-CTP with the CTP and original R-CTP. And here our main goal is to improve the data aggregation as well as the routing fields, which can be achieved effectively and efficiently.
7 Conclusion and Future Work
The data aggregation here assumes with great importance to WSNs. There have been solutions has provided in the past and he latest one has the efficient. The R-CTP is mainly focused on the routing layer of the CTP which provides effectively on the routing to achieve best performance. Now the R-CTP has a very good protocol which we are compared here with the CTP and its different variants. We further identified the difficulties in the R-CTP and provides the best solutions for the efficient transfer of the data. While comparing the other protocols we found the improved version of R-CTP is improved 12% more transfer of the packets, reduce in the latency by 2% and huge increase in the TX and RX packets and rest also assured.
Further future research work can be enhanced by the various factors. This mainly can be dealt with dynamic load balance for the link quality, so that it may reduce the link quality headaches; and in the dynamic adaptively problem solving for trickle algorithm and adaptive beaconing.
References
Fariborz Entezami, Martin Tunicliffe, and Christos Politis, “RCTP: An Enhanced Routing Protocol Based on Collection Tree Protocol,” International Journal of Distributed Sensor Networks, vol. 2015, Article ID 363107, 7 pages, 2015. doi:10.1155/2015/363107
Jingjing Zhang, Zhenqi Yang, Baowei Wang, Huiyu Sun and Xingming Sun, E-CTP: An Energy-balanced Collection Tree Protocol for Power Constrained Wireless Sensor Networks, International Journal of Grid and Distributed Computing. Vol.7, No.2 (2014), pp. 115–126
Ugo Colesanti and Silvia Santini, The Collection Tree Protocol for the Castalia Wireless Sensor Networks Simulator, Technical Report 729, Department of Computer Science, ETH Zurich, Zurich, Switzerland, June 2011
O. Gnawali, R. Fonseca, K. Jamieson, D. Moss, and P. Levis, “Collection tree protocol,” in Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems (SenSys’09), pp. 1–14, ACM, New York, NY, USA, November 2009.
Y. Song, Y. Chai, F. Ye, and W. Xu, “A novel TinyOS 2.x routing protocol with load balance named CTP-TICN,” in Knowledge Engineering and Management, vol. 123 of Advances in Intelligent and Soft Computing, pp. 3–9, Springer, Berlin, Germany, 2011.
Y.-Z. Wu, D.-P. Quan, and H.-G. Han, “Pareto optimal collection tree protocol for industrial monitoring wsns,” in Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps’11), pp. 508–512, IEEE, Houston, Tex, USA, December 2011.
Y. Li, H. Chen, R. He, R. Xie, and S. Zou, “ICTP: an improved data collection protocol based On CTP,” in Proceedings of the International Conference on Wireless Communications and Signal Processing (WCSP’10), pp. 1–5, October 2010.
J. Zhao, L. Wang, W. Yue, Z. Qin, and M. Zhu, “Load migrating for the hot spots in wireless sensor networks using CTP,” in Proceedings of the 7th International Conference on Mobile Adhoc and Sensor Networks (MSN’11), pp. 167–173, IEEE, Beijing, China, December 2011.
W. R. Hein Zelman, “Application-specific protocol architectures for wireless networks”, PhD Thesis, Massachusetts Institute of Technology, June 2000.
W.R. Hein Zelman, A.P. Chandrakasan, H. Balakrishnan, “An application-specific protocol architecture for wireless micro sensor networks, IEEE Trans Wireless Communications”, October 2002, pp. 660–670.
J. Kulik, W.R. Heinzelman, H. Balakrishnan, “Negotiation-based protocols for disseminating information in wireless sensor networks, Wireless Networks”, vol. 8, March 2002, pp. 169–185.
C. Intanagonwiwat, R. Govindan, D. Estrin, “Directed Diffusion: A Scalable and robust communication paradigm for sensor networks”, Proceedings of the Sixth Annual International Conference on Mobile Computing and Networking (MobiCOM ‘00), August 2000.
S. Lindsey, C. Raghavendra, K.M. Sivalingam, “Data gathering algorithms in sensor networks using energy metrics”, IEEE Trans. Parallel and Distributed Systems, vol. 13, no. 9, September 2002, pp. 924–935.
K. Du, J. Wu, D. Zhou, “Chain-based protocols for data broadcasting and gathering in sensor networks,” International Parallel and Distributed Processing Symposium, April 2003.
M. Ding, X. Cheng, G. Xue, “Aggregation tree construction in sensor networks,” 2003 IEEE 58th Vehicular Technology Conference, vol.4, no.4, October 2003, pp. 2168–2172.
H. O. Tan, I. Korpeoglu, “Power efficient data gathering and aggregation in wireless sensor networks,” SIGMOD Record, vol. 32, no. 4, December 2003, pp. 66–71.
K. Vaidhyanathan, S. Sur, S. Narravula, P. Sinha, “Data aggregation techniques sensor networks,” Technical Report, OSU-CISRC-11/04- TR60, Ohio State University, 2004.
Pranesh V Kallapur, Vibha Prabhu, “Performance Analysis of LEACH, CTP, ECTP Using Castalia
Pranesh V Kallapur, Vibha Prabhu, “Improved Variant of CTP for Enhanced Data Delivery Ratio and Reduced Computation Overhead”, IEEE International Conference On Applied and Theoritical Computing & Communication Technology(ICATCCT-2015), 29–31 October, 2015, India
Pranesh V Kallapur, Vibha Prabhu, “Enhanced Variants of CTP for Improved Data Delivery Ratio and Energy Consumption”, IEEE International Conference On Applied and Theoretical Computing & Communication Technology (ICATCCT-2015), 29–31 October, 2015, India
Castalia User’s Manual http://castalia.npc.nicta.com.au/documentation.php
OMNeT ++ User Manual (Version 4.4.1). www.omnetpp.org/doc/omnetpp33/manual/usman.html.
Ugo Colesanti and Silvia Santini, A performance evaluation of the collection tree protocol based on its implementation for the Castalia wireless sensor networks simulator. Technical Report 681, Department of Computer Science, ETH Zurich, Zurich, Switzerland, August 2010.
B. Krishnamachari, D. Estrin, S. Wicker, “The impact of data aggregation in wireless sensor networks,” Proc. 22nd International Conference on Distributed Computing Systems Workshops, July 2002, pp. 575–78.
TinyOS Wiki, “Tep119-collection,” http://www.tinyos.net/tinyos-2.x/doc/txt/tep119.txt.
T. A. Ramrekha and C. Politis, “A hybrid adaptive routing protocol for extreme emergency ad hoc communication,” in Proceedings of the 19th International Conference on Computer Communications and Networks (ICCCN)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Machado, J.P., Kallapur, P.V. (2018). Performance Evaluation and Improvement of R-CTP for Enhanced Packet Transmission and Latency. In: Shetty, N., Patnaik, L., Prasad, N., Nalini, N. (eds) Emerging Research in Computing, Information, Communication and Applications. ERCICA 2016. Springer, Singapore. https://doi.org/10.1007/978-981-10-4741-1_17
Download citation
DOI: https://doi.org/10.1007/978-981-10-4741-1_17
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-4740-4
Online ISBN: 978-981-10-4741-1
eBook Packages: EngineeringEngineering (R0)