
Abstract
This first specialized chapter deals with the awaited generalization to mechanical behaviours that deviate from linear elasticity and standard Newtonian viscous fluids, that is, elasticity in large deformations and the rheology of complex fluids. These extensions were kindled by the mechanics of rubber elasticity and artificial fabrics and of fluids with high viscosity and visco-plastic response. It happens that the same scientists were involved in these two lines as a result of a required focus on the bases of continuum mechanics, in particular the theory of finite deformations in a rational geometric background, and the need to account for complex flow features in some fluids. Ronald Rivlin, with his incommensurable contributions, is the great hero in this adventure. Other scientists whose work was seminal are initially E. Bingham, M. Reiner, L.G.R. Treloar, P. J. Flory, M.A. Mooney, and F.D. Murnaghan, and more recently J.G. Oldroyd, A.E. Green, J.L. Ericksen, C.A. Truesdell, B.D. Coleman, and W. Noll. The survey includes the models of neo-Hookean materials, Mooney-Rivlin materials, Rivlin-Ericksen fluids, and unsuccessful attempts such as those of Reiner-Rivlin fluids and hypoelasticity. Appropriately introduced tools have been those of Rivlin-Ericksen tensors, Oldroyd and Jaumann time derivatives, and invariant representations of scalar and tensorvalued functions. Through Rivlin and his co-workers the whole carries a strong print of British applied mathematics although Italian and Russian contributions to nonlinear elasticity cannot be overlooked. The mechanics of soft living tissues has now become the best field of application of these developments.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
3.1 Beyond Standard Linear Elasticity and Viscous Fluids
3.1.1 General Remarks
As mentioned in Chap. 2, at the dawn of the twentieth century, we perceive shy attempts to venture in the domain of the continuum mechanics of more complex mechanical behaviours with the introduction of dissipative behaviours and some nonlinearity (such as in plasticity but not to the point of being able to solve difficult problems of evolution). But the object of continuum mechanics remains the same as before: to evaluate the deformation or flow that results from the application of a system of forces to a body, whether solid or fluid. In the early twentieth century, this is achieved only for elastic materials which undergo infinitesimal deformations (i.e., within linear elasticity) or for Newtonian viscous fluids, two cases fully developed in the nineteenth century. The set of equations to be considered consists, in the body, of the field equations, here written as the Euler-Cauchy equations of motion [in direct and indicial (Cartesian tensor) notations],
where \( \sigma \, = \,\left\{ {\sigma_{ji} } \right\} \) stands for the symmetric Cauchy stress, \( {\mathbf{v}}\, = \,\left\{ {v_{i} } \right\} \) denotes the velocity field, and \( {\mathbf{f}} = \,\left\{ {f_{i} } \right\} \) represents an external bulk force per unit mass. Equation (3.1) is complemented by appropriate boundary conditions, and initial conditions in the case of dynamics.
In linear (isotropic, homogeneous) elasticity, we have the Hookean constitutive equation:
where the infinitesimal strain e is defined as:
Here \( {\mathbf{u}} = \left\{ {u_{i} } \right\} \) is the displacement vector, while λ and μ are the Lamé coefficients.
For Newtonian fluids, we have the Navier-Stokes constitutive equation:
where the rate of strain D—or symmetric velocity gradient—is defined as:
Here \( {\mathbf{v}} = \left\{ {v_{i} } \right\} \) is the velocity vector, while λ v and μ v are the two viscosity coefficients. If the condition \( 3\lambda_{v} + 2\mu_{v} = 0 \) is fulfilled, then (3.4) reduces to the constitutive equation of a Stokesian fluid:
where now both σ and D d are trace-less (i.e., deviatoric) tensors.
The two Eqs. (3.2) and (3.4) can be seen as deriving from some potential (energy in the first case, dissipation in the second one) as:
and
following the views of Green and Rayleigh, respectively. The semi-positive definiteness of W requires that
A similar set of inequalities holds for the viscosity coefficients.
3.1.2 Non-Newtonian Fluids
Let us first consider the case of fluids. The Navier-Stokes equations apply to fluids of which we can say that they flow rather easily. First, they flow as soon as a small force is applied (no threshold) and they correspond to a simple model of proportionality in 1D, that of Newton given by equation (f) in Chap. 1, that we can rewrite as:
for a shear rate \( \dot{\gamma } \). Here τ denotes the tangential stress and η depends at most on temperature. This was beautifully confirmed by Poiseuille’s experiment concerning blood flow (1844, laminar flow in a cylindrical tube). The unit of viscosity, the “Poiseuille”, was given to honour this scientist, but it is not an SI unit.
But early in the twentieth century the question was raised of the possible mathematical description of liquids that are manifestly viscous but they can flow only slowly and sometimes presenting a threshold in force for the activation of a real flow. In the latter case it seems that the behaviour is somewhat mixed between viscosity and plasticity. These fluids may be food stuff, fuels and biofluids, and in more recent times personal-care products (various gels and pastes), electronic and optical materials, and various polymers. This general problem was first identified by chemical engineers and chemists. Among them, Eugene Bingham (1878–1945), a professor and head of the Department of Chemistry at Lafayette College (not a research institution) in Pennsylvania, coined the appropriate term “rheology”—together with his friend Markus Reiner (1886–1976) from Palestine (the state of Israel did not exist yet) at the Technion—to denote the general study of such flows. They also founded a corresponding scientific society under the name Society of Rheology in 1929. The spot on motto of the Society is Πάντα ρεϊ or “panta rhei” [Greek for “everything flows”, attributed to Heraclitus of Ephesus (c. 535–c. 475 BCE)]. Bingham revisited some ideas of Maxwell on what he calls “semi-fluids” and paid special attention to the case of so-called visco-plastic fluids (or Bingham fluids in modern terminology). This may be vividly illustrated by the tooth paste that comes out of the tube as a flow of product with a rigid core when one presses on the tube. Such a phenomenon may be observed in the extrusion production of some metallic bars at high temperature. Other strange phenomena were observed such as the so-called Poynting effect discovered in 1909—this is the same Poynting as in the Poynting theorem in electromagnetism (See Chap. 12)—and related to the existence of a difference in normal stresses or strains due to an impressed shear stress. To tell the truth, according to Rivlin (1984), Poynting discovered the effect not in a standard medium but in relation to light propagation in a kind of elastic medium (the ill-fated aether). More recently, K. Weissenberg (1949) discovered the “rod-climbing effect” according to which some “non-Newtonian” fluids have a tendency to climb along the rod that is vertically rotated (torsional flow) in a cylindrical container filled with such a fluid. Other non-linear effects proper to non-Newtonian fluids are swelling upon emergence from a tube and the bulging if allowed to flow downward in a through.
For further reference we can note the following nonlinear generalization of (3.10):
where \( m = \mu_{v} ,\,n = 1 \) corresponds to a Newtonian fluid, while shear thickening fluids are such that viscosity increases with the shear rate, i.e., \( m \ne 0,\,n > 1 \), and shear thinning fluids have a viscosity that decreases when driven to flow at a high shear rate. A Bingham visco-plastic fluid is such that
where τ g is a threshold in shear stress.
But a fluid body is not generally a one-dimensional object so that we need the proper formalism (in particular tensorial kinematic objects) for a true three-dimensional formulation of non-Newtonian fluids (see Sect. 3.2 below).
3.1.3 Nonlinear Elasticity
Simple generalizations of linear elasticity to a nonlinear framework were proposed for some metals at the end of the nineteenth century by considering a stress as a power expansion in the infinitesimal strain and then trying an identification of coefficients by testing the materials (see Bell’s encyclopaedia article, 1973, Sect. 2.23), since (3.2) may appear as a first order approximation. The same kind of approximation may be constructed on the basis of a lattice model of continuum by considering nonlinear interactions between neighbouring “particles” in a discrete chain. In passing asymptotically to a continuum this applies to the case of very small deformation (of the order of \( 10^{ - 4} \)) expected, for instance, in electro-acoustic crystals.
But the obviously most interesting case, because offering a much more exciting challenge, is that of elastic materials likely to admit very large strains (say, of the order of 200 % or much more, e.g., 1,000 or 2,000 %) such as rubber-like materials, certain polymers, and some biological tissues. In these cases we are much better equipped than for non-Newtonian fluids, because the whole panoply of useful stress tensors and required finite-strain tensors has been developed in the nineteenth century and refined in the first half of the twentieth century. In particular, we mention the book of Murnaghan (1951) which was one of the first books to provide all the required mathematical tools in finite deformations.
Francis D. Murnaghan (1873–1976) is an interesting character. He was originally from Ireland and trained as a mathematician. He went to Johns Hopkins University in Baltimore where Harry Bateman (the applied mathematician) had just been appointed. Obtaining his PhD in 1916, he returned to Johns Hopkins in 1919 to become professor, and then head of the mathematics department in 1928, after a short stay at the Rice Institute in Houston, Texas. The later was a new institution founded thanks to a donation by Williams M. Rice; this became a University only in 1960. A man of many scientific interests, Murnaghan was in fact a rather pure mathematician with his main interest in the theory of group representations (classical groups, unitary and rotation (orthogonal) groups, symplectic groups). It is probably this specialty that brought him to write his famous book on finite deformations. This book still is a fundamental reference for all those interested in the application of finite strains and symmetries in continuum mechanics.
It is the proper relationship between the two sets of tensorial quantities (stresses and strains) that must be constructed as the relevant constitutive equations, for isotropic or anisotropic materials. In so far as possible, these should be thermodynamically admissible and derivable from a potential. We shall examine this matter in Sect. 3.2 where the seminal contributions of Ronald Rivlin (1915–2005) are emphasized. This happens to be also the case of non-Newtonian fluids where Rivlin left his name attached to various classes of fluids (Sect. 3.3).
3.2 Nonlinear Elasticity
3.2.1 Reminder
The following reminder is useful. The general deformation mapping is given by Eq. (1.4) between a reference configuration K R and the actual configuration K t . The direct and inverse deformation gradients are given by (1.5) and (1.9), respectively. The commonly used material tensor measures of finite-strains are the symmetric Cauchy and Lagrange material strain tensors such that (T stands for the operation of transposition):
For hyperelastic materials with an energy W per unit reference volume, the material stress–strain relation is given by [cf. Eq. (1.20)]:
The Cauchy stress follows by inverting the last of (1.12), i.e.,
The Finger strain tensor (after Joseph Finger, 1841–1925)—sometimes noted \( {\mathbf{c}}^{ - 1} \)—defined as:
is also useful but in the actual configuration.
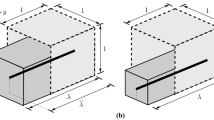
Many rubber elasticians (e.g., Treloar 2005) prefer to describe finite strains by means of the (principal) stretches along the three material orthogonal coordinates. These stretches are introduced thus. Consider a cube of edges of unit length in K R . Under isothermal situations, after deformation this is transformed in a rectangular block with edge lengths \( \lambda_{1} ,\,\lambda_{2} ,\,\lambda_{3} \). If the considered deformation is substantially incompressible—this is a reasonable working hypothesis for rubber like materials—we will have the constraint \( \lambda_{1} \,\lambda_{2} \,\lambda_{3} = 1 \). Equivalently, we can think in terms of the principal axes of the strain ellipsoid introduced by Cauchy. In a general way the three basic invariants of tensor C are defined by:
These are the three scalar invariants involved in the Cayley-Hamilton theorem applied to matrix C. In terms of the stretches, this can be rewritten as
If there exists a stored elastic energy W per unit reference volume, it must be such that \( W = W\left( {\lambda_{1} ,\,\lambda_{2} ,\,\lambda_{3} } \right) \). Associated “material responses” (internal forces) are directly defined by the “Biot” constitutive relations:
For an incompressible \( (J_{F} = 1,\,I_{3} = 1) \)material, the corresponding forces per unit deformed area are then given by [cf. Eq. (3.15)]
3.2.2 The Works of Treloar, Mooney and Rivlin
The main contributors to the development of rubber elasticity theory in the 1930–1950s certainly are Paul J. Flory (Nobel Prize 1974), Guth and James, Treloar, Mooney and Rivlin. They all worked closely with the related industry of rubber and early artificial fabrics. They all considered first an approach based on the physical description of polymers with long chains of molecules and thus necessarily exploiting arguments of statistical physics. But Ronald S. Rivlin (1915–2005)—although also a good experimentalist-, with his initial training as a mathematician in Cambridge, was the one who tried to use a pure mathematical standpoint to formulate the expression of relevant energies for rubber like materials. In doing so he contributed forcefully to the modern theory of continua in the large. He is probably the greatest of our heroes in the field (and also an original and difficult character; see below). In the theoretical and experimental developments of rubber elasticity, a critical and beneficial role was played in the UK by the British Rubber Producers Research Association (BRPRA) and then the British Rayon Research Association (BRRA).
Personal touch: Rivlin was educated at Cambridge (BA in Mathematics in 1937, MA in 1939). After a short stay at General Electric Co and two years as a Scientific Officer with the ministry of Aircraft Production during WWII, he spent nine years at the BRPRA, from 1944 to 1953, doing both seminal theoretical and experimental works with a one-year intermission/visit to the National Bureau of Standards in Washington (1946–1947) and a fruitful stay at the Naval Research Laboratory in Maryland (1952–1953). There his meetings with Jerald L. Ericksen and Richard A. Toupin were to produce also fundamental contributions. He did not return to the UK but joined Brown University (1953–1967) after which he settled at the Centre for the Application of Mathematics at Lehigh University (1967–1980). His works are marked by excellent applied mathematics, a clear overall vision of the field, and a sober style of writing (compared to Truesdell’s grandiloquent style). In social contacts he had a sure sense of his own remarkable achievements, a specifically British sense of humour, a certain condescendence for the work of many people, and a devastating critical and sometimes unjust view of other great contemporary scientists. I witnessed his original behaviour on two specific occasions. One was at the Oberwolfach Center of Mathematics in the Black Forest—in the early 1980s—where he forgot that the other people present also needed some food at night! The other was at the IUTAM Colloquium celebrating his own former co-worker, Tony Spencer, where he spent the entirety of his lecture time to expand a sharp critic of the Royal Society (where he was not elected—although he definitely deserved this election) and to describe (his opinion) the ever worsening quality of papers published in the journals of the Society; see in Chap. 5 his critic of the Truesdellian school.
As a useful information we insist that most developments that follow concern isotropic bodies and most often incompressible ones.
Leslie R. G. Treolar (1906–1985), with a PhD from London (1938) was one of the most active concept builders of the mechanics of rubber as shown by his splendid book (first published in 1944, but with several editions—see the edition of 1975). He worked for the BRPRA before WWII and for the BRRA after WWII before joining the University of Manchester Institute of Science and Technology (period 1966–1974) as a Professor of Polymers and Fibre Science. He is most well known for his deduction from statistical physics of the following remarkably simple energy expression for an incompressible material such as made of long polymer chains (1946):
where N is the number of chain segments per unit volume, θ is the thermodynamic temperature, k B is Boltzmann’s constant, ν is a coefficient that depends on the details of the assumed molecular model, and I 1 is the first invariant from (3.18). With p an arbitrary hydrostatic pressure accounting for incompressibility, Eqs. (3.19) and (3.20) yield
This checks well with a previous result of Guth and James, and Flory, for the tensile force f needed to extend a rod of unit cross section by a multiplicative factor λ, i.e.,
As to the shearing force necessary to maintain a simple shear of amount γ, it is given by:
Experimental data are in fair agreement with the results (3.23) and (3.24). But note that all this applies to homogeneous deformations.
Now we turn to the works of Rivlin and co-workers. With a mathematical vision of the problem, the strain energy for an isotropic rubber-like material must be a function of the three basic invariants—reduced to two in the incompressible case—of the deformation [cf. Eqs. (3.17) or (3.18)]. This follows from a celebrated theorem due to Cauchy and reported in Murnaghan (1951). As a first approximation the following strain energy can be proposed:
Rivlin (1948) called this a neo-Hookean form. The reason for this is that in small strains (3.25) reduces to the Hookean (pure shear) form
Of course, in (3.25) the coefficient C must be determined experimentally although (3.25) strongly resembles (3.21). The tensorial equation replacing the second of (3.22) reads
By using such a constitutive relation, Rivlin was able to show that for simple shear of amount γ, not only a shear component of stress develops, but also unequal normal components (proportional to γ 2) that are acting in mutually perpendicular directions determined by the direction of shear and the normal to the plane of shear. The difference between two of these normal components is related to the Poynting effect mentioned in Sect. 3.1: the simple shear cannot be maintained by shearing surface loads alone (a hydrostatic pressure—Kelvin effect—keeping the volume constant is not enough)! Thus the theoretical proof of this effect is a crucial asset for the nonlinear theory based on (3.25) or its generalizations.
The continuum model (3.25) relies on the highly idealized molecular model yielding the energy density (3.21). One is therefore tempted—as was the case for Ronald Rivlin—to strictly apply Cauchy’s representation theorem for the scalar valued function W for isotropic materials, consider from the start a function \( W = W\left( {I_{1} ,I_{2} ,I_{3} } \right) \), and envisage an approximation accounting, say, for incompressibility. Thus, we have the reduction \( W = W\left( {I_{1} ,\,I_{2} } \right) \). For instance, for vulcanized rubbers, one can write
where function F is a monotonically decreasing function of its argument in the range of interest. It happens that Mooney (1940), on the basis of some experimental observations, has proposed an energy density of the form:
where both C 1 and C 2 are constants. This is a special case of (3.28). Thus model (3.29) is nowadays called a model of Mooney-Rivlin material. This has become the most popular model for incompressible rubber-like materials. Just for this Rivlin deserves to be honoured in the Hall of Fame of Elasticity.
3.2.2.1 Approximate Theories
These are theories that appear to be approximations of (3.29) by discarding some degrees in the deformation of line elements and the rotation of volume elements supposed to be small. A theory of this class had in fact been proposed by Murnaghan in a long paper of 1937.
3.2.3 Further Generalizations
3.2.3.1 Anisotropy
A technologically interesting case concerning the industry of tyres is that where rubber is reinforced by fibres. These fibres introduce locally a privileged direction of unit vector d. The problem of representation of the corresponding energy was initially considered by Ericksen and Rivlin (1954). The solution consists in applying the representation theorem for the full orthogonal group to a function of the finite strain and the vector d. This usually results in a function depending on six joined invariants, but one of them is none other than the unit length of d, and one has to account for the inextensibility of the fibres. This aspect was thoroughly discussed and applied in various problems by J.E. Adkins, A.C. Pipkin, T.G. Rogers, and A.J.M. Spencer. The last author, Anthony J.M. Spencer (1929–2008)—Tony for his many friends—, a very kind person and an alumnus from Cambridge, worked on his Doctoral degree with Frank Nabarro in Birmingham and then with Ian Sneddon in Keele. During a stay of 2 years at Brown, he established a fruitful co-operation with Rivlin and Albert Green, both original Britons. He rapidly became one of the most important contributors to the theory of invariants and its applications to the mechanics of continua (see his contribution of 1971). After serving 2 years at the Atomic Weapons Research Establishment in Aldermaston (UK), he joined the University of Nottingham. There he succeeded John Adkins as Professor of Theoretical Mechanics and Head of the Department in 1965 until retirement in 1994. His book of 1972 synthesizes his research results in the mechanics of fibre-reinforced materials. Spencer also is the author of a nicely readable little book on general continuum mechanics (1976).
Personal touch: During an extended stay (1985) at Nottingham the author had the occasion to befriend Tony and to witness his talent in the peaceful organization of his department, together with such bright scientists as David F. Parker, Arthur England, and the regretted Tryfan G. Rogers, among others.
3.2.3.2 Generalized Mooney-Rivlin Materials
In modern terms let us introduce a multiplicative decomposition of the deformation gradient F that singles out the dilatational contribution \( J_{F}^{1/3} {\mathbf{1}} \) so that
whence \( {\bar{\mathbf{F}}} \) and \( {\bar{\mathbf{C}}} \) refer to the distortional deformation alone. Using this formalism a compressible generalization of the Mooney-Rivlin material is described by an energy of the form:
where the two summed terms represent the distortional and volumetric responses, respectively, and we have set
A compressible Mooney-Rivlin material corresponds to the special case
For \( C_{01} = 0 \) and \( J_{F} = 1, \) we recover the neo-Hookean material. Otherwise, in small strains, we recover the Hookean material with bulk modulus \( \kappa = 3\lambda + 2\mu = 2D_{1} \) and \( \mu = 2\left( {C_{01} + C_{10} } \right) \). The general formula (3.31) includes a rich number of possibilities.
3.2.3.3 Odgen Model
In 1972, Ogden introduced another general model in the following form:
where \( \alpha_{n}^{{}} \) may be either positive or negative. Such a model opened up a large variety of possibilities of modelling for rubberlike materials and biological tissues as well. This proved to be extremely useful as compared to previously proposed models especially in biomechanics, e.g., Fung’s one given by:
where E KL is none other than the finite Lagrange strain of Eq. (3.13), c is a scalar, and C KLMN and B KLMN are tensors of material coefficients. Sometimes, this is referred to as Fung’s elastic material.
With all these models the elasticity of large deformations is now understood as a rewarding and useful field of study. We may even say that “nonlinear elasticity” was rescued or saved from oblivion by the necessity to study the behaviour of many exploited rubberlike materials of polymeric type and the biomechanics of soft tissues. Examples of applications and other problems are to be found in Ogden (2003) and other contributions in the same volume.
3.2.3.4 Mullins Effect
This effect refers to the stress softening that is observed when a rubber specimen is subjected to cyclic loading. It was apparently first observed by the French scientists Bouasse and Carrière in 1903. But Mullins of the BRPRA described it in 1947. In this effect the resulting stress–strain response depends on the previously reached maximum load so that it can be said that the model is stress-history dependent. It resembles the damage of solid materials in which the elastic modulus is altered by the previous loading (in general decreases after cycles of loads). It is clear that a model involving an energy depending only on the standard strain invariants is not sufficient to describe this behaviour of the hysteretic type (or pseudo-elastic type). At least one additional scalar parameter must be introduced to describe the effect. Ogden and Roxburg (1999) have proposed such a modelling that includes a damage variable \( 0\,\, < \,\,\,\eta \,\, \le \,\,1 \) with a typical energy density made of two terms:
We refer to these authors and further works by Dorfmann and Ogden for more on this type of approach that strongly resembles the thermodynamic formulation of modern theories of plasticity and damage (cf. Maugin 1999, and Chap. 5 hereinafter).
Note: Most non-French readers—and also most French students and professors—have probably never heard of Henri Bouasse (1866–1955). But Bouasse, a brilliant mind educated at the ENS in Paris (see Chap. 7 on the French masters) with doctoral degrees in both physics and mathematics, spent most of his career (1892–1937) at the University of Toulouse. He had a kind of idée fixe: he wrote a treatise in 45 (yes, forty-five) volumes—each 300–500 pages long-, about all fields of classical physics in reaction against what he estimated (his opinion) the bad quality of the teaching of physics in France, and against the “new physics” (relativity, quantum mechanics). This was called the “Scientific Library for the Engineer and the Physicist”. His best volumes are those on acoustics and capillarity. This last one still is a useful reference. A few years ago, the present author bought a dozen of never read near mint hardbound volumes of this large opus at the flea market in Paris for less than fifty dollars the lot!.
3.3 Non-Newtonian Fluids
Now we turn to the possible generalizations of the fluid constitutive Eqs. (3.4) or (3.6). According to the historical sketch given by Coleman et al. (1966), the initial general idea of Stokes in 1845 about a viscous fluid constitutive equations would have been of the form (here, incompressible, and using modern notation)
where the last term is a (symmetric deviatoric) tensor-valued function of the deviator of the rate of deformation tensor D. It is Reiner (1945) who, going beyond the linear Stokes fluid, proposed that f be a symmetric polynomial in D. He thus started with the assumption that
where the \( \beta_{\alpha } \)’s are functions of the density ρ. Upon using the Cayley-Hamilton theorem to D and invoking incompressibility, one finds that (3.38) reduces to
where β 1 and β 2 are still functions of the remaining invariants \( I_{2} = trace{\mathbf{D}}^{2} \) and \( I_{3} = trace{\mathbf{D}}^{3} \). Apparently independently of Reiner, Rivlin proposed the constitutive Eq. (3.39) that is therefore referred to as that of a Reiner-Rivlin fluid. It was already remarked by Reiner that a model such as (3.39) yields not only non-linear viscosity but also normal stress effects. But if the two normal stresses are equal—as shown by applying (3.39) to specific flows—this does no explain the observed Poynting effect. Indeed, Oldroyd (1950) strongly criticized (3.39) as being unable to characterize so-called viscometric flows (See Coleman et al. 1966; Truesdell 1974, for this notion) if only a function of D alone is considered. The solution to this problem was given by Ericksen and Rivlin (1954) who showed that the stress had to depend on further time derivatives of the deformation gradient, e.g., the acceleration gradient tensor, etc. To that purpose they introduced what are now referred to as the Rivlin-Ericksen tensors noted \( {\mathbf{A}}_{n} \). These are defined by a recurrence such as
At first one may think that the new general constitutive equation should involve a dependence of the Cauchy stress σ on the Finger tensor c and the sequence of Rivlin-Ericksen tensors. For an incompressible isotropic fluid Ericksen and Rivlin assumed that the deformation itself is not involved and they proposed the general constitutive equation
where f is an isotropic tensor-valued function of its arguments. Rivlin (1956) then showed that this can account for non-equal normal stresses in viscometric flows, thus definitely improving on the Reiner-Rivlin model.
Example of a consistent constitutive equation after (3.41):
where the αk′s depend on \( trace\,{\mathbf{A}}_{1}^{2} \) only.
Remark 3.1
A perhaps nicer definition than (3.40) can be given thus to the Rivlin-Ericksen tensors. Let \( {\mathbf{F}}_{t} \left( \tau \right) \) denote the deformation gradient of the material point X at time \( \tau \le t \) relative to time t. Call \( {\mathbf{C}}_{t} \left( \tau \right) = {\mathbf{F}}_{t}^{T} \left( \tau \right){\mathbf{F}}_{t} \left( \tau \right) \) the corresponding Cauchy-Green strain. Then
This definition is due to Noll after Green and Rivlin (1957).
Remark 3.2
The idea behind the representation (3.41) is that if, following Oldroyd’s view (1950), the stress is to depend on the past history of the deformation gradient, then for sufficiently smooth deformations, Taylor’s theorem enables one to express it in terms of the instantaneous values of the deformation gradient and its time derivatives. Equation (3.41) is what results when the instantaneous value of the strain is discarded (no standard elasticity) and incompressibility is imposed.
The last remark relates to the original model proposed by Oldroyd in 1950. There, this author proposed that the stress at time t be determined by an integro-differential tensor equation that relates the stress and the history of the convected metric (i.e., a strain) tensor. The approximations made on this modelling in order to be able to solve representative problems can be shown to provide solutions equivalent to those that would follow in the framework of a second-order approximation of the Rivlin-Ericksen constitutive equation. Although the idea of involving the history of the past deformation in a constitutive behaviour goes back to the hereditary model of Boltzmann (cf. Chap. 2 above), the first comprehensive properly invariant (tensorial) continuum theory involving these integral representations seems to be due to Green and Rivlin (1957). This resulted from a general functional relation of the type
by means of an approximation by a series of multiple integrals (over past time), assuming the functional \( \Upphi \) to be Fréchet differentiable. This will not be expanded here because the present author thinks that this is not the most convenient mathematical form of constitutive equations in problem solving (see the notion of internal variable of state in Chap. 5). What we note, however, is that the functional relation (3.43) stands for Noll’s (1958) definition of a so-called “simple” material, the “simple” being here rather euphemistic. The fundamental paper on the approximation of time functionals in the framework of so-called “vanishing memory” remains the paper by Coleman and Noll (1961). These functional models allow one to account for the modelling of stress-relaxation. This naturally brings us to the following item.
3.4 Rheological Models and Further Extensions
3.4.1 Zener’s One-Dimensional Models
In Eqs. (i) and (k) of Chap. 1 we have recalled the Maxwell and Kelvin-Voigt models of linear visco-elasticity. These models account for a relaxation in stress and strain, respectively. They are easily represented by so-called rheological models, spring and dashpot in series, in the first case, spring and dashpot in parallel in the second case. These rheological models—see Zener (1948)—are practically hated and/or ridiculed by purists in continuum mechanics. Nonetheless they have a heuristic value and help the “simple minded” rheologist to build models that can become rather complex by a multitude of arrangements of simple elements—see Chap. 2 in Maugin (1992) and Vyalov (1986). But these models are one-dimensional. To go from them to true three-dimensional models one must have at hand the correct three-dimensional generalizations of the rates of strain and stress. If the former is easily constructed (see above the Rivlin-Ericksen tensors), the latter must be built so as to provide objective (i.e., independent of the observer) entities. The answer to this query was provided by Oldroyd in his landmark paper of 1950, with the notion of “Oldroyd time derivative”, although we note that Jaumann (1911) had already proposed a solution of a different type.
3.4.2 Oldroyd’s Time Derivative
This notion can be introduced thus. Consider the first of Eq. (3.15) and write the two-ways relations
In modern vocabulary these two equations represent the “pull back” and “push forward” operations of convection between actual and reference configurations. They could be represented symbolically by the following obvious notation
Then the Oldroyd convected time derivative \( \hat{\sigma } \) of \( \sigma \) is defined as
The evaluation of \( \hat{\sigma } \) in terms of the time derivative of \( \sigma \) and the gradient of the velocity requires only the knowledge of the expressions of the time derivatives of \( {\mathbf{F}} \) and \( {\mathbf{F}}^{ - 1} \). The result of this easy computation is
The acute observer from geometry will notice that this is none other than a Lie derivative in following the velocity field in an appropriate four-dimensional space–time. The so-called Truesdell time derivative \( \tilde{\sigma } \) of \( \sigma \) is deduced by considering S rather than (S/J F ) in the above equations, resulting in the formula
Note that the exact expression of a Lie derivative depends on the variance of the tensorial object to which it is applied. This leads to a distinction between so-called “upper” and “lower” Oldroyd derivatives, but we do not need to enter this technical point here. Such derivatives have been used in constructing a lot of different three-dimensional models of non-linear visco-elasticity. It is not our purpose here to discuss this branch of rheological modelling. We prefer to refer the reader to an excellent book on the subject (e.g., Giesekus 1984).
In contrast the Jaumann time derivative (here noted D J ), while also objective, involves only the vorticity Ω—or rate of rotation tensor—rather than the whole velocity gradient. For instance, for a vector V and a second-order tensor \( \sigma \) we have the following expressions:
The last of these is equal to the Oldroyd derivative (3.46) up to (objective) terms linear in D. The Jaumann derivative is a special case of co-rotational time derivative (Eringen and Maugin 1990, p. 17).
Oldroyd, Truesdell and Jaumann derivatives are of interest not only in rheology but also in the electrodynamics of continua (see Eringen and Maugin 1990, Volumes I and II). However, as a simple example from pure mechanics, we can cite the Truesdell isotropic (grade-zero) model of “hypo-elasticity”
With obvious time rates on both sides of this equation, this looks very much like the time derivative of Hooke’s law. But it is “weaker” than the Hooke law since it relates the derivatives of functions rather than the functions themselves, hence the coinage of “hypo-elasticity”. This kind of relationship between an objective time rate of a stress and the rate of strain was introduced by Truesdell with the hope to include the plastic behaviour in his “rational” scheme of continuum mechanics. This is now obsolete as plasticity now is most often presented within the framework of the thermodynamics of bodies with internal variables of state (cf. Maugin 1992). This is one more favorable argument for introducing objective time derivatives. Indeed, the idea that goes back to Coleman and Gurtin (1967)—and perhaps to Duhem—is to replace the time functional over the past history in Eq. (3.43) by a traditional function dependence on a set (as small as possible) of variables of which the time evolution is constrained by the second law of thermodynamics: they produce dissipation. If these variables are vector or tensor-valued, then we need to account for their dutifully defined objective time rates such as the above given ones. The case where the description of the complex fluid behaviour accounts for the time evolution of the internal microstructure is thus dealt with by Maugin and Drouot (1983)—see also Maugin (1999). We shall return to this type of approach in Chap. 5.
3.5 Concluding Remarks
In this chapter we have rapidly explored the innovative developments concerning the rheology of fluids and the birth of an applicable nonlinear theory of elasticity. The first of these bears traces of the influence of chemical engineers, while the second carries a strong print of British applied mathematics clearly dominated by the emblematic person of Ronald Rivlin. The great names are those of Bingham, Reiner, Treloar, Rivlin, Green, Oldroyd, Truesdell, Coleman and Noll. This adventure is mostly British and American, with the exception of Reiner. Successful developments have been achieved step after step. Some of these steps are now forgotten, e.g., the Reiner-Rivlin model and the hypoelasticity of Truesdell. Still these were useful in producing tools and a way of general thinking that provided sound bases for the whole of continuum mechanics. The most interesting period has been the one spanning between 1940 and 1970. This is not to say that no further progress was achieved afterwards and by scientists in other countries, in particular in Europe. New strongholds of rheological studies have appeared in the 1960–1980s as for instance in the USA with W. R. Schowalter at Princeton, A.S. Lodge in Wisconsin (formerly in Manchester, UK), L.G. Leal in Santa Barbara, D.D. Joseph in Minneapolis, L.G. Larson, in Canada with Pierre J. Carreau at Montreal Polytechnic, with O. Hassager in Denmark, H. Giesekus in Germany, and also in the UK with E.J. Hinch, K. Walters and R.I. Tanner, in Belgium with J.-M. Crochet, in Australia with R.R. Huilgol and N. Phan-Thien, in France with Angles d’Auriac and his Grenoble close co-workers (see Chap. 7 on the French masters), and J.-M. Piau first in Paris-Orsay and then in Grenoble. But most developments there are related to specifying special types of constitutive equations using the tools constructed by the great masters, accounting for a microstructure, solving particular problems and implementing numerical methods, where we acknowledge that the behaviour of non-Newtonian fluids poses difficulties. The European based journal Acta Rheologica played an important role in disseminating research, and this probably as much as the Journal of Non-Newtonian fluid mechanics or the Journal of Rheology in the USA.
On the non-linear elasticity front, we have emphasized again the contribution of Ronald Rivlin and his various co-workers in the USA (e.g., J.L. Ericksen), and in the UK (A.E. Green, A.J.M. Spencer,…). This again looks like a pure Anglo-American adventure. But this does not mean that no deep and fruitful studies were achieved in other places. In particular, we note the formidable achievements by the Italian school in the 1910s (e.g., E. Almansi) and in 1930s with a quantity of contributions in finite deformations, for instance by authors such as P. Burgatti, G. Armani, D. Bonvicini, U. Cisotti, B. Finzi, C. Tolotti, and A. Tonolo (see Truesdell 1952, for full citations) in the formal approach to finite-strain elasticity, and also around Antonio Signorini (1888–1963) and his “allievi”, Carlo Cattaneo and Giuseppe Grioli, in the analytic solution of fundamental elasticity problems. Among these we must cite the Signorini’s perturbation method in finite elasticity (1930) that allows one to solve a class of traction boundary-value problems, his work on finite-strain thermo-elasticity (1943 and on), and the celebrated “Signorini problem”: find the elastic equilibrium configuration of an anisotropic non-homogeneous elastic body resting in a rigid frictionless surface and subjected only to its weight. Truesdell had an immense admiration for these works. Also, we cannot ignore any substantial contribution from the Soviet Union (e.g., by Novozhilov 1953; Goldenblatt 1962; Lurie 1980, and their students; see Chap. 11 below).
But finite-strain elasticity mostly concerns rubber-like materials and the mechanics of soft biological tissues. No wonder, therefore, that most recent advances were accomplished within these two fields, with a remarkable creativity demonstrated in original developments of the theory of growth of biological tissues. These materials, first described as purely elastic, albeit not linear, are now governed by both elasticity and growth—both in volume and at the surface—due to the action of nutrients. In this line of fruitful research which goes much beyond the scope of this book, we find the works of S.C. Cowin, R. Skalak, L.A. Taber, E.K. Rodriguez, A. Hoger, M.E. Gurtin, M. Epstein, G.A. Maugin, S. Imatani, S. Guiligotti, A. Di Carlo, D. Ambrosi, L. Preziosi, J.-F. Ganghoffer, E. Kuhl, and P. Ciarletta.
Personal touch. I feel that the present chapter fully exhibits the dynamics of a field in expansion with its shy progresses, trials, errors, missed steps, and breakthroughs, and the fact that new developments rapidly made previous ones obsolete. Thus the Reiner-Rivlin modelling of fluids was rapidly superseded by a new model designed by Rivlin himself so that the former fell into oblivion almost instantaneously (on the historical scale). The “adventure” of “hypo-elasticity” is also exemplary: in Eringen’s book of 1962—perhaps written while the field was not ripe enough-, some 50 pages are devoted to hypo-elasticity and its relation to plasticity. This has completely disappeared in the other Eringen text book of 1967. It is with some melancholy that I recollect a period at which I was trying to persuade some colleagues that we did not need hypo-elasticity at all in spite of the sacred words of pundits.
References
Bannes HA, Hutton JF, Walter K (1989) An introduction to rheology. Elsevier, UK
Bell JF (1973) The experimental foundations of solid mechanics. In: Flügge S, Truesdell CA (eds) Handbuch der Physik, vol VIa/1. Springer, Berlin, pp 1–813
Bingham EC (1922) Fluidity and plasticity. McGraw Hill, New York
Bouasse H, Carriére Z (1903) Courbes de traction du caoutchouc vulcanisé. Ann Fac Sci Toulouse 5:257–283
Carroll MM, Hayes MA (2006) In memory of Ronald S. Rivlin, Mathematics and Mechanics of Solids 11:103–112
Coleman BD, Gurtin ME (1967) Thermodynamics with internal variables. J Chem Phys 47:597–613
Coleman BD, Markovitz H, Noll W (1966) Viscometric flows of non-Newtonian fluids: theory and experiment. Springer, NewYork
Coleman BD, Noll W (1961) Foundations of linear viscoelasticity. Rev Mod Phys 33:239–249
Ericksen JL, Rivlin RS (1954) Large elastic deformations of homogeneous anisotropic materials. J Rat Mech Anal 3:281–301
Eringen AC (1962) Nonlinear theory of continuous media. McGraw Hill, New York
Eringen AC (1967) Mechanics of continua. Wiley, New York
Eringen AC, Maugin GA (1990) Electrodynamics of continua. Springer, New York
Fung YC (1993) Biomechanics: mechanical properties of living tissues. Springer, New York
Giesekus H (1984) Phänomenologische Rheologie: Ein Einführung. Springer, Berlin
Goldenblatt II (1962) Some problems of the mechanics of deformable media. Noordhoff, Groningen (English translation from the Russian)
Green AE, Adkins JE (1970) Large elastic deformations, 2nd edn. Oxford University Press, Oxford
Green AE, Rivlin RS (1957) The mechanics of non-linear materials with memory I. Arch Rat Mech Anal 1:1–21
Huilgol RR, Phan-Thien N (1997) Fluid mechanics of viscoelasticity. Elsevier, Amsterdam
Jaumann G (1911) Geschlossenes system physikalischer und chemischer differenzialgesetze, Sitzber. Akad Wiss Wien (Ha) 120:385–530
Larson RG (1988) Constitutive equations for polymeric melts and solutions. Butterworth, Boston
Lodge AS (1964) Elastic liquids: an introductory vector treatment of finite-strain polymer rheology. Academic, New York
Luri’e AI (1980) Nonlinear theory of elasticity. Nauka, Moscow (in Russian)
Maugin GA (1992) The thermomechanics of plasticity and fracture. Cambridge University Press, UK
Maugin GA (1999) The thermomechanics of nonlinear irreversible behaviors: an introduction. World Scientific, Singapore
Maugin GA, Drouot R (1983) Internal variables and the thermodynamics of macromolecule solutions. Int J Eng Sci 21:705–724
Mooney MA (1940) A theory of large elastic deformation. J Appl Phys 11:582–592
Mullins L (1947) Effect of stretching on the properties of rubber. J Rubber Res 16:275–282
Mullins L (1969) Softening of rubber by deformation. Rubber Chem Technol 42:339–362
Murnaghan FD (1937) Finite deformation of an elastic solid. Amer J Math 59:235–260
Murnaghan FD (1951) Finite deformation of an elastic solid. Wiley, New York (Unfairly criticized by Truesdell in his review of this book reprinted in Truesdell, 1984, pp 148–150)
Noll W (1955) On the continuity of the solid and fluid states. J Rat Mech Anal 4:13–81
Noll W (1958) A mathematical theory of the mechanical behavior of continuous media. Arch Rat Mech Anal 2:197–226
Novozhilov VV (1953) Foundations of the nonlinear theory of elasticity. Graylock Press, Rochester (English translation from the 1948 Russian edition)
Ogden RW (1972) Large deformation isotropic elasticity, Part I. Proc R Soc A326:565–585; Part II, ibid A328:567–583
Ogden RW (1982) Elastic deformations of rubberlike solids. In: Hopkins HG, Sewell MJ (eds) Mechanics of solids (The Rodney Hill 60th anniversary volume). Pergamon Press, Oxford, pp 499–537
Ogden RW (2003) Nonlinear elasticity, anisotropy, material stability and residual stresses in soft tissues. In: Holzapfel GA, Ogden RW (eds) Biomechanics of soft tissues in cardiovascular systems (CISM lecture no. 441). Springer, Wien, pp 65–108
Ogden RW, Roxburg DG (1999) A pseudo-elastic model forth Mullins effect in filled rubber. Proc R Soc Lond A455:2861–2878
Oldroyd (1950) On the formulation of rheological equations of state. Proc R Soc A200:523–541
Reiner M (1945) A mathematical theory of dilatancy. Am J Math 67:350–362
Rivlin RS (1948) Large elastic deformation of isotropic materials, Part I. Philos Trans R Soc Lond A240:459–490; Part II, ibid A241:379–397
Rivlin RS (1956) Solution of some problems in the exact theory of visco-elasticity. Ration Mech Anal 5:179–188
Rivlin RS (1984) Forty years of non-linear continuum mechanics. In: Proceedings of the Conference on Ninth International Congress of Rheology. pp 2783–2811
Rivlin RS (1996) Autobiographical postcript. In: Barenblat GI, Joseph DD (eds) Collected papers of R.S. Rivlin. Springer, New York, p 22
Signorini A (1943) Trasfomazioni termoelastiche finite, Memoria 1. Ann di Mat Pura ed Applicata 22(4):33–143
Signorini A (1949) Trasfomazioni termoelastiche finite, Memoria 2. Ann di Mat Pura ed Applicata 30:1–72
Signorini A (1955) Trasfomazioni termoelastiche finite, Memoria 3. Ann di Mat Pura ed Applicata 39:147–201
Schowalter WR (1976) Non-Newtonian fluid mechanics. Pergamon Press, London
Spencer AJM (1971) Theory of invariants. In: Eringen AC (ed) Continuum physics, Vol 1, Chap. 3. Academic Pres, New York
Spencer AJM (1972) Deformation of fibre-reinforced materials. Clarendon Press, Oxford
Spencer AJM (1976) Continuum mechanics. Longman, Harlow
Tanner RI, Walter K (1999) Rheology: an historical perspective. Elsevier, UK
Treloar LGR (1946) The elasticity of a network of long-chain molecules. Trans Faraday Soc 42:83–94
Treloar LRG (2005) The physics of rubber elasticity, 3rd edn. Clarendon Press, Oxford
Truesdell CA (1952) The mechanical foundations of elasticity and fluid dynamics. J Rat Mech Anal 1(1):125–300
Truesdell CA (1974) The meaning of viscometry in fluid dynamics. Annu Rev Fluid Mechanics 6:111–146. Academic Press, New York
Truesdell CA (1984) An idiot’s fugitive essays on science. Springer, New York
Vyalov SS (1986) Rheological fundamentals of soil mechanics. Mir Publishers, Moscow (translation from the Russian)
Weissenberg K (1949) Abnormal substances and abnormal phenomena of flow. In: Proceedings of the International Congress of Rheology (1948). North-Holland, Amsterdam, pp I-29–I-46
Zener C (1948) Elasticity and anelasticity of metals. The University of Chicago Press, Chicago
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Maugin, G.A. (2013). Rheology and Nonlinear Elasticity. In: Continuum Mechanics Through the Twentieth Century. Solid Mechanics and Its Applications, vol 196. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6353-1_3
Download citation
DOI: https://doi.org/10.1007/978-94-007-6353-1_3
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6352-4
Online ISBN: 978-94-007-6353-1
eBook Packages: EngineeringEngineering (R0)