
Abstract
This chapter is devoted to the assessment of the geometry of concrete components. This is of interest for many structures, for which the testing solutions may differ, according to the environment and to constraints like accessibility. We have chosen to discuss possible solutions for pavements, thin elements (mainly concrete slabs and tunnel shells) and foundations (shallow foundations and piles).
Other contributors to this chapter are G. Ballivy, X. Dérobert, A. Kodjo, F. Pires and L. Olson.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1
This chapter is devoted to the assessment of the geometry of concrete components. This is of interest for many structures, for which the testing solutions may differ, according to the environment and to constraints like accessibility. We have chosen to discuss possible solutions for pavements, thin elements (mainly concrete slabs and tunnel shells) and foundations (shallow foundations and piles).
2 Problem description, testing tasks
2.1 Pavement
Testing problem
The thickness of pavements on bridge decks is relevant if the pavement or parts thereof have to be removed without destroying the sealing which is in most cases present between the pavement and the concrete surface. In combination with a geodetic survey the pavement thickness also allows for the calculation of the height of the concrete surface beneath the pavement which is in many cases relevant for the planning of rehabilitation. The thickness of single pavement layers is of little interest on bridges. The condition of pavements is an issue. However the definition of damage and its relation to the results of non-destructive testing is not straightforward.
Methods: Ground Penetrating Radar (GPR)
Level of interpretation
NDT inspections are carried out covering the whole surface of bridge decks, along single lines and on limited areas. As modern GPR equipment is capable of acquiring hundreds of measurements per second, data are in many cases acquired along single or parallel lines. In the case of parallel lines, the spacing between those lines is a cost relevant factor.
Accuracy/Uncertainty
An accuracy of better than 10 mm is often required and can be obtained with the help of a limited number of cores for calibration.
Special difficulties
The inspection of pavement thickness is a routine application of the GPR method. Adapted equipment is required (high temporal sampling rate of GPR unit and high frequency (> 1GHz) antennas).
2.2 Thin elements
2.2.1 Thickness of inner shells of tunnels
Testing problem
The aim is tocontrol the thickness of inner shells of tunnels, especially for indicating reduced thickness. The main purpose is the quality assurance (in Germany, this is recommended by Ministry of Transport, BASt - Federal Highway Research Institute). An important aspect is the protection of the sealing which is located between the rock and the internal shotcrete layer. The layer thickness is typically 15 cm to 60 cm.
Methods: Ultrasonics, Impact Echo, Ground Penetrating Radar (GPR)
Level of interpretation
The whole length of tunnels has to be inspected. When using Ultrasonics or Impact-Echo, the acquisition grid is usually 80 cm x 80 cm, and 40 cm x 40 cm around joints. In areas of estimated anomalies it has to be reduced to 10 cm x 10 cm. When GPR is used, the distance between single measurements can be reduced to values of less than 1 cm in the direction of the antenna movement. Results of large areas have to be presented in single plots to enable an overall view of the situation.
Accuracy/Uncertainty
A typical value if the desired uncertainty of the measurement is 2 cm.
Special difficulties
Quality assurance demands the measurement of large areas. For the interpretation of the results, point measurements are evaluated and then combined. They are visualised as line scans (for details see Chapter 2). In the case of difficult site conditions (e.g. dense reinforcement, rough surfaces or anomalies) advanced data processing may be useful. When using Ultrasonics or Impact-Echo, the location and density of the rebar should be known or measured with adequate methods (e.g. commercial imaging systems or GPR).
A thickness measurement requires a sufficient physical contrast between the layers. For example, if there is no sealing, the difference in the acoustic impedance between concrete and the next layer (e.g. lime stone) may not be large enough.
Areas, where reduced thickness is indicated, have to be repaired. This is usually carried out with special injection mortars (or synthetic resin). The success of the repair can only be verified by mechanical methods, if there is a good bonding between the concrete and the injection mortar.
2.2.2 Concrete slabs
Testing problem
Bottom slabs of factory floors or car parks are typically 10 cm to 20 cm thick. As far as structural safety is concerned, the exact fulfilment of predefined thicknesses is not a crucial point. But since the production costs of large surfaces are very high, there is often a dispute between customer and contractor about the correct use of materials (cement, concrete, cast plaster; often special plaster). In this case, an accurate thickness control may be useful.
Methods: Ultrasonics, Impact-Echo, GroundPenetrating Radar (GPR)
Level of interpretation
As bottom slabs can be very large, the inspection can range from single locations of special interest to acquisition grids of 1m x 1m (Ultrasonics and Impact-Echo).
Accuracy/Uncertainty
The desired accuracy is 1 cm or better because of the high material cost.
Special difficulties
When high accuracy is demanded (uncertainty lower than 10 mm), the signal velocity has to be known very accurately. Since there is a variation between 1 % and 5 %, the velocity has to be calibrated following the demand of uncertainty.
2.3 Shallow foundations
Testing problem
Many foundations of demolished structures have the potential of reuse. In order to evaluate their integrity, several questions have to be answered. Important results have been obtained within the research project RUFUS (Reuse of Foundations for Urban Sites; EU 5th framework) (Taffe and Niederleithinger, 2006).
Relevant parameters are:
-
Geometry of slabs
-
Location of piles and strip foundations between slabs
-
Structures and materials beneath the foundation (soil, lean concrete layers,)
-
Reinforcement size and location, often several layers
-
Integrity: honeycombing, badly compacted areas, cracks
Methods: Ultrasonics, Impact-Echo, Ground Penetrating Radar (GPR)
Level of interpretation
Since foundation slabs are usually heavily reinforced, a dense acquisition grid is often necessary to obtain the required information. The interpretation of single point measurements is rarely sufficient.
Uncertainty (accuracy): 2 to 5 cm, 5 %
Special difficulties
In order to decide, which NDT-method is applicable, the reinforcement ratio and/or the density and diameter of rebar should be known. Commercially available equipment such as cover-meters can be used to obtain that information.
Measurements with GPR are much faster than methods applying mechanical waves, but GPR is more sensitive to dense reinforcement and depth of penetration may be limited because of moisture in young concrete.
For ultrasonic echo methods, a smooth surface is required.
The depth of inspection for acoustic methods (ultrasonic-echo, impact-echo) is limited by the first reflecting layer. This is also valid for very thin air-filled layers or sealings (e.g. bituminous sealings).
The accuracy (uncertainty) of the measurement depends on the exact knowledge and the homogeneity of the signal velocity. It can be measured with cores or estimated from the signal velocity at the surface.
A reflection from the bottom of the foundation slab is required for the investigation of the slab thickness. This reflection will only take place if there is a sufficient contrast in physical properties between concrete and the subjacent material (density and/or elastic modulus for acoustic methods, capacitive measurements and/or conductivity for GPR). In addition, because of the limited resolution of all reflection methods, the bottom reflection may not be separable from a low lying layer of rebar which would reduce the accuracy of the thickness measurement.
2.4 Deep foundations, piles and shafts
Testing problem
Deep foundations are mostly below the ground and therefore not accessible to visual inspection. The quality of foundations should be verified to ensure structural integrity to carry the required loads without bearing capacity failures and to limit displacements of the structure to acceptable levels. This quality control can help to avoid or limit an overdesign of the foundation. In particular, the following parameters are relevant:
-
the pile length, which has to be in conformity with the design,
-
the cross-section, which must correspond to what had been planned, to obtain a correct service load of the pile,
-
the overall quality of concrete, including the possibility of localized anomalies (voids, areas where concrete and soil are mixed…).
Cast-in drilled holes (CIDH) piles are also inaccessible to visual inspection and very prone to contain zones of compromised cross-section due to the casting process, like the collapse of the excavation prior to concrete placement. Quality control must be employed to identify such problems. Non-destructive evaluation (NDE) after construction can be used to check the acceptability of the construction work in meeting the performance specifications.
Methods: Ultrasonics, Seismics and Radioactive Testing
Level of interpretation
The estimation of the length is the first objective. A numerical value is expected to verify that the pile reaches a layer of good properties or has enough friction.
Regarding the cross-section, irrregularities (necks or bulges) which could inducea lower pile strength and their vertical position are important.
Heterogeneities and voids should be detected and their locations both in the vertical and horizontal directions have to be defined together with their magnitude (what percentage of the cross-section is affected).
Defects and heterogeneities affect the carrying capacity (to vertical or lateral loadings) of foundations. However, once defects are detected/localized/quantified, their influence on the mechanical properties is still unknown. It is suggested to define criteria for the characterization of heterogeneities (size or volume or the percentage of variation of material physical properties like wave velocity) before final decisions regarding the pile integrity are taken.
Accuracy/Uncertainty: 4 % (with known signal velocity)
Special difficulties
The main difficulty is that these structures are not directly accessible. During the construction works, their upper surface, waiting to be connected to the superstructure, remains free, but it is not the case when existing structures are inspected. Some techniques require equipped tubes and can only be used if this has been planned before the construction. Another difficulty, common to many NDE techniques, is that the assessment requires assumptions (like the wave speed), which can induce some uncertainty on the results.
3 Common techniques
3.1 Pavement
The inspection of pavement thicknesses on bridges is a common application of the GPR method. Pavement thicknesses are investigated on whole bridge decks or parts thereof. Data are usually acquired along lines, the combination of several lines can lead to pseudo-3D results. There are many reasons for pavement inspections on bridge decks. The knowledge of the pavement thickness can avoid the destruction of the sealing when the asphalt is removed during rehabilitation work. The combination of a GPR inspection with surveying of the asphalt surface provides a detailed knowledge of the height of the concrete surface beneath the pavement. There are systems from several manufacturers, producing antennas in a wide range of frequencies. For the investigation of pavements, horn antennas are useful because they can be operated in non-contact mode. This facilitates the use of mobile acquisition units for large surveys (Fig. 4.1).

Mobile GPR acquisition unit
2.1.1 Example of the use of GPR for thickness survey
A ramp leading to a bridge (Sihl flyover) is shown in Fig. 4.2. A GPR survey was carried out on this ramp using EMPA’s mobile acquisition system presented in Fig. 4.1.

Ramp of Sihl Flyover
The acquisition parameters and the equipment used can be summarized as follows:
GPR unit: GSSI SIR-20 Antennas: GSSI Model 4205 horn; 1.2GHz
Acquisition speed: 10 km/h Traces/m: 40 Samples/Scan: 512
As there are no standards for acquisition parameters available, they have to be selected carefully based on the knowledge of the GPR method, the problem under inspection and the actual situation (e.g. traffic situation, availability of additional information, budget, etc.).
A 40 m long radargram from this ramp is presented in Fig. 4.3. The reflection at the asphalt – concrete interface is marked with a white arrow. The corresponding GPR result for the pavement thickness is shown in Fig. 4.4. The signal velocity used for the conversion from time to depth/thickness was 0.143 m/ns. This velocity was obtained with the help of a borehole. In order to examine the quality of the GPR results, the pavement was removed along the line with an excavator (Fig. 4.5) and the pavement thickness was measured manually with a ruler. Thus, the GPR results could be compared with the real pavement thickness.

Data set from Sihl flyover, vertical axis – time in nanoseconds, horizontal axis – length in meters

GPR result for thickness of asphalt pavement, vertical axis-pavement thickness in mm, horizontal axis-length in meters

Pavement opening with excavator
In Figure 4.6 the GPR result (dotted line) is presented together with the real pavement thickness (solid line) and the absolute differences (dots) between reality and GPR result. Obviously, there is a good agreement between GPR result and reality. The mean difference between GPR results is 5 mm, the maximum difference is 17 mm.

Comparison between GPR result and reality for thickness (in mm) of asphalt pavement: dashed line-GPR result, solid line-reality as measured with ruler along opened pavement, dots-absolute difference between GPR result and reality
2.1.2 Accuracy and reliability of results
EMPA has carried out a research project sponsored by the Swiss Federal Roads Authority. GPR inspections were carried out on five bridges designated for demolition. Results were laid open before the bridges were taken down. During demolition GPR results were verified by measuring pavement thicknesses with a ruler along the edges of lines where the pavement had been removed with a milling machine or along lines where the pavement had been opened with an excavator (see example above). Details of this approach are described in ASTM standards (see reference below). The mean difference between GPR results and results obtained with the ruler was 9mm. GPR results for the pavement thickness were obtained on 95% of the sections inspected. No result was obtained on 5% of the sections inspected because of various reasons such as that that was no pavement (on joints, gully holes,…) or because of the limited vertical resolution of the GPR method in zones were the concrete-cover of rebar was too small. Other studies resulted in similar accuracies as listed in Table 4.1.
2.1.3 Guidelines
-
Standard Guide for Using the Surface Ground Penetrating Radar Method for Subsurface Investigation, Annual Book of ASTM Standards 2005, Section four, Construction, Volume 04.09 Soil and Rock (II), D5714, Designation: D 6432 – 99
-
ASTM D6087-03 (2003), “Standard Test Method for Evaluation asphalt-covered concrete bridge decks using ground-penetrating radar”, ASTM Int., PA, US, 4 p.
-
Merkblattüber das Radarverfahrenzur Zerstörungsfreien Prüfungim Bauwesen (Instruction leaflet about the radar method for non-destructive-testing in civil engineering), German Society for Non-Destructive-Testing, February 2008, revised edition.
3.2 Thin elements
3.2.1 Thickness of inner shells of tunnels
The inner shells of tunnels are usually concrete slabs in the range of 10 cm to 40 cm as described in §1.2.1. For thickness measurement, three methods are principally suited: Ultrasonic echo, Impact echo and GPR.
The quality assurance of thickness of inner shells of tunnels using NDT-Methods is described in a guideline of the German Ministry of Transport (BMVBS). It is recommended for all tunnels funded with public money, the costs have to be considered in the tender [BASt, 2001, Guideline RI-ZFP-TU]. For the measurement only engineering offices and companies are permitted, which have passed a qualification test at a concrete slab. This is organised and controlled by the Federal Highway Research Institute (Bundesanstalt für Straßenwesen, BASt).
3.2.1.1 Ultrasonic echo
Since the control of the thickness is demanded at many points all over the surface, all equipment with ultrasonic A-scan indication can be used. The data are stored following the measuring grid and visualised afterwards. The criterion of clear echo indication has to be taken into account, which is normally a signal to noise ratio of 6 dB (factor 2).
If a measurement point is situated above a reinforcing bar, the determination of the thickness may be hindered. In this case the point has to be moved some centimeters to obtain a good back wall reflection. In case of dense reinforcement or large diameter, the location of rebar may be determined with electromagnetic methods during a preparatory study.
As a fast measurement procedure is desirable, ultrasonic equipment with dry contact transducers (point contact) is preferred, since they don’t need coupling agent. The equipment that is currently commercially available uses shear waves.
3.2.1.2 Impact echo
Commercially available impact-echo equipment working with steel ball excitation or solenoid driven impactors is suitable for point measurements. Near the edges of the casting segment the user has to be careful because of possible edge effects. The thickness is determined via the Fourier Transform of the time signal. As there is currently no general criterion available for the quality assessment of this signal, experienced and trained operators are required.
For the determination of the thickness, the signal velocity has to be calibrated. Since thickness measurements are mainly used for quality assurance on new structures, this is effectuated normally on test specimens, which are produced simultaneously with the tunnel wall. In many cases the knowledge of the absolute thickness is less relevant than the localization of areas with reduced thicknesses (see §1.2.1). Thus, an exact frequency reading is often more relevant than an accurate knowledge of the signal velocity because this velocity can be assumed near to constant on structures of constant design and age.
Example combining Ultrasonic echo and Impact echo
In a new tunnel on Germany’s motorway A1 (Fig. 4.7) the thickness of the inner concrete shell was inspected using Impact Echo and Ultrasonic Echo. Signal velocities were calibrated using test specimens that were produced in parallel to the construction of the inner shell, a first reference point with known depth to an added metal reflector and a second reference point with known concrete thickness. It turned out, that only the second reference point enabled a precise comparison between known concrete thickness and the corresponding reflection in the recorded dataset. This applied to both Ultrasonic Echo and Impact Echo and is probably due to the unfavourable geometry of the specimens and the lack of a unique correspondence between reflections and the position of the metal plate for the first reference point.

Inner shell of a new tunnel on Germany’s motorway A1
In Figs. 4.8 and 4.9 the results of the two methods are compared. The thicknesses obtained with both methods are almost identical.

Thickness of inner shell obtained with Ultrasonic Echo

Thickness of inner shell obtained with Impact Echo
3.2.1.3 Ground Penetrating Radar (GPR)
As modern GPR equipment works with high pulse repetition frequencies, GPR is used normally as a line scanning method. The distance between two measuring points along a scanning line is very small. Thus the method simultaneously localises rebar, which is useful additional information.
A disadvantage of the GPR method is that it is rather sensitive to moisture. This means that the electromagnetic waves are attenuated by the moisture content of young concrete. Additionally the method is more sensitive to the shielding effect of rebar than the acoustic methods.
Example of use of GPR
A field experiment [Hugenschmidt, 2003] was carried out on a 12 m long test site, where different wall types were available and where the details of their construction were well known. Figure. 4.10 shows a view of the section inspected. The concrete is marked with arrow “A”, the sealing with arrow “B” and rock covered with shotcrete with arrow “C”. An overview over the different wall types is presented in Fig. 4.11.

Tunnel wall with waterproofing-membrane

Wall types on inspected section
The dataset presented in Fig. 4.12 was acquired in longitudinal direction with the GSSI model 5100 antenna. The distance between the concrete surface of the tunnel wall and the rock surface (not equal to the concrete thickness in sections with waterproofing membrane because of a drainage fleece between membrane and rock) is varying between 0.15m and 0.4m. It is known as it had been recorded as transverse sections in distances of 0.5m before the wall was built. The maximum distance of 0.4m should not cause problems with the depth of penetration of the antenna used [Hugenschmidt, 2003].

GPRdata from tunnel wall, length = 12 m
In sections where the membrane is present, there is a clear reflection from the concrete-membrane interface. No reflection is caused by the concrete-rock (siliceous limestone) interface. This is likely due to the similarity in material properties of concrete and rock.
3.2.2 Guidelines
-
Merkblattüber das RadarverfahrenzurZerstörungsfreienPrüfungimBauwesen (Instruction leaflet about the radar method for non-destructive-testing in civil engineering), German Society for Non-Destructive-Testing, February 2008, revised edition
-
RI-ZFP-TU: Richtlinie für die Anwendung der zerstörungsfreien Püfung von Tunnelinnenschalen; Ausgabe 2007-12.In: ZTV-ING, Teil 5: Tunnelbau: Geschlossene Bauweise, Anhang A. Verkehrsblatt-Sammlung Nr. S1056 (2007), pp 29-35
-
Guidance on Radar Testing of Concrete Structures, Concrete Society Technical Report 48, The Concrete Society, Slough, UK.
3.3 Shallow foundations
The choice of technique depends mainly on the thickness of the foundation and the amount of reinforcement. In some cases (e.g. recently completed structures) the moisture content within concrete may also be relevant. Although the success of NDT-techniques depends on many additional aspects, mechanical methods such as Ultrasonic echo or Impact echo will have in many cases a larger depth of penetration than GPR.
3.3.1 Examples of NDT investigations
Ultrasonic inspections were carried out on the Large Concrete Slab (LCS) (Fig. 4.13) with varying amounts of rebar described in more detail in §4.2.2. Broadband low-frequency transducers were used. Dry point contact sensors that do not need a coupling agent have been used [Shevaldykin et al. 2003].

Investigated section of the foundation slab including pile heads and strip foundation
For a reliable imaging of the complex geometry an automated transducer positioning system (scanner) has been used (Fig. 4.14). Data (8000 measuring points) have been recorded and processed with the help of reconstruction calculation. The so-called SAFT (Synthetic Aperture Focusing Technique) focuses signals received at many aperture points by coherent superposition, yielding a high-resolution image of the region of interest. The following images are results of SAFT-reconstruction. Various sections through the reconstructed data volume can be processed and layers with significant reflections become obvious and visualise internal objects and geometry.

Automated ultrasonic measurement at test site
Figures 4.15 and 4.16 show the section parallel to the surface at depth of 125cm and 75cm. The expected reflection of the back wall of the different slabs and the strip foundation at corresponding depth are clearly visible. In upper left and upper right corner (dashed circles) two small areas show no back wall reflection. This is where the pile heads are located because the signals propagate from the slab further into the piles and are not reflected at the depth of the back wall.

Section parallel to the surface at depth of 125 cm indicating the strip foundation

Section at depth of 75 cm indicating the pile heads
For the reinforcement ratio along a-a, the vertical cross section is presented in Fig. 4.17. The back wall for both depths is clearly visible. The interrupted back wall reflection between y = 700mm to y = 1000 mm results from the pile head in that area.
For the high reinforcement ratio along b-b (Fig. 4.18) only in the non-reinforced sections a clear back wall signal appears. In the sections with upper and lower reinforcement a strong reflection in the surface near depth is visible but no significant reflection of the back wall occurs. Only a weak signal at the 75cm section allows depth estimation.
If the 28mm diameter reinforcement is present only in the lower level, as shown along section c-c, the reinforcement bars produce a reflection in addition to the back wall reflection a few centimetres above (Fig. 4.19). Only in the 7cm section the reflections from the reinforcement and the back wall can be distinguished.

Cross section a-a with Ø12, s=15 cm (only lower reinforcement)

Cross section b-b Ø28, s=10 cm (upper and lower reinforcement)

Cross section: c-c Ø28, s=10 cm (only lower reinforcement)
The three sections of Figs. 4.17 to 4.19 show that the back wall (dashed line) does not match in every section with the recorded reflection. The reason is that only one approximated ultrasonic velocity has been considered. The difference between measured reflection and expected reflection indicates that for every section its ultrasonic velocity depending on the reinforcement ratio has to be considered. This will be part of further investigations in the validation process of thickness measurement with ultrasonic echo.
Cross-section d-d shown in Fig. 4.20 also reveals the geometry of the slab and the location of the piles. The back wall reflections at 75cm and the bottom of the strip foundation at 125cm are clearly visible. Also the detected width of the strip foundation of 50cm and its location agree well with reality. The interrupted back wall echoes at the depth of 75 cm between x=800 mm and 1100 mm and x=3850 mm and 4150 mm mark the location of the pile heads.

Cross section d-d revealing the slab geometry and location of the pile heads
3.3.2 Guidelines
-
Standard Guide for Using the Surface Ground Penetrating Radar Method for Subsurface Investigation, Annual Book of ASTM Standards 2005, Section four, Construction, Volume 04.09 Soil and Rock (II), D5714, Designation: D 6432–99
-
Merkblattüber das RadarverfahrenzurZerstörungsfreienPrüfungimBauwesen (Instruction leaflet about the radar method for non-destructive-testing in civil engineering), German Society for Non-Destructive-Testing, February 2008, revised edition
-
Reuse of Foundations for Urban Sites, A Best Practise Handbook, result of a research project in the frame of the 5th frame work, IHS BRE press, 2006.
-
Guidance on Radar Testing of Concrete Structures, Concrete Society Technical Report 48, The Concrete Society, Slough, UK.
3.4 Deep foundations, shafts and piles
Two families of techniques, both based on propagation of mechanical waves, are used in common practice for cast in place piles quality assessment (“PET” for pile echo testing or PIT for pile integrity testing), the first being based on the analysis of the echo of sonic waves, the second relying on the ultrasonic transparency analysis between a transmitter and a receiver. Two of these methods have been standardized in several countries and they have several variants which are briefly described in the following. Table. 4.2 synthesizes the ability of various common and special techniques.
In the following, Sonic (PET) and Crosshole Logging (CSL) are discussed as common techniques, thus the other techniques will be presented at §3.
3.4.1 Sonic echo – Pile echo testing
Pile echo testing (PET), also known as low strain dynamic test, sonic echo test and low strain integrity test) is a method for condition assessment and length control. The name “low strain dynamic tes&uot; stems from the fact that when a light impact is applied to a pile it produces a low strain. The impact produces a compression wave that travels down the pile. The lower end of the pile or changes in the cross sectional area, such as a reduction in diameter or material changes, such as defects, produce wave reflections.
PET, which originated from the Netherlands [van Koten and Middendorp 1980], is the most common method for testing the integrity and length of piles of all kinds. In its original form, the test involved a vibration imposed through an electro-dynamic device, such as to impose a sinusoidal force of constant amplitude. Thanks to advances in signal processing, it is now performed with a single hand held hammer. It has been normalized in widely accepted standards (ASTM 5882, NF P 94 160-2, DGGT EAP). The test also requires an accelerometer or geophone placed on top of the pile to measure the response to the hammer impact, and a data acquisition and interpretation electronic instrument.
Pile length L is estimated from the Δt time of arrival of the wave, the velocity c being given (Fig. 4.21):

Principle of sonic echo measurement, after [Niederleithinger and Taffe, 2006]
The quality of the length assessment depends on the quality of the wave velocity estimation. The assessment will not identify small but perhaps structurally significant variations in c through weak concrete zones.
The Impulse response method (IR) or Transient Dynamic Response (TDR) test is an extension of the sonic echo test. The method is based on measuring the frequency and amplitude response of a pile induced by an impulse [Davis, 2003]. It requires an instrumented hammer to measure the impulse force on the pile top force in addition to motion (Fig. 4.22). The time domain signal is converted to frequency using the Fast Fourier Transform.

Performing the Impulse response method
This response, known as Mechanical Admittance (or mobility), contains all the information necessary to check pile integrity and to analyse soil influences (ACI, see guidelines). At low frequency the response is generally linear allowing measurement of pile-head stiffness, while, at higher frequency, the resonating harmonics of the pile are detected.
Length is estimated from the distance between resonating peaks in the frequency domain (Fig. 4.23):

Mobility curve
where c is the velocity of longitudinal waves in concrete and Δf is the distance between two resonating peaks.
The quality of the length assessment depends on the quality of the wave velocity estimation.
The mean amplitude (Pm – Qm in Fig. 4.23) of the resonating portion of the curve is a function of the impedance I of the pile, which depends on the pile cross-section A, the concrete density ρc and the wave velocity:
The mobility is the inverse value of the impedance. It is also possible to derive the mass M of the pile from the Mo value:
The main advantage of the sonic echo technique is that it is a quick and simple technique, once access is given to a clear and flat surface on top of the concrete pile (minimum age: 7 days).This crucial point for the accuracy of results requires that any weak or loose concrete has to be removed. Vibrating reinforcement or other items connected to the pile may also affect data quality. The equipment used is lightweight and portable and is very rapid in operation: a single measurement only takes about 30 seconds, so random spot checking is possible. The technique enables to identify the severity and vertical location of major defects.
The sonic techniques can be adapted for the investigation of existing structures if near head areas of the shaft are accessible. The success in assessing in-service deep foundation elements depends on several factors. Simplicity and low cost of these methods are compelling reasons for their trial before more complex and expensive means are employed.
Limitations:
-
data interpretation requires experience and expertise.
-
the accuracy of the length estimate or of the defect depth depends on an assumed stress-wave velocity,
-
there are some geometrical limitations, with a length limitation of approximately 25 to 50 diameters (depending on various factors, like the soil conditions),
-
multiple defects or those below a major impedance change cannot be discerned,
-
small defects are often not detected, neither gradual changes in the pile section,
-
the technique is not sensitive to the horizontal location of a defect in the cross-section.
3.4.2 Cross-hole sonic logging (CSL)
Cross-hole Sonic Logging (CSL, also named sonic coring in France) was developed in the late 1970’s in France. This method requires PVC or steel tubes to be placed before casting. This is a major limitation but the technique can be very effective in assessing concrete quality and evaluating the location and extent of defects. It is a very common procedure and has been standardized (NFP, see guidelines).
It is based on the fact that the ultrasonic wave velocity is about 4000 m/s in plain concrete but changes with compaction or when voids or defects are present. The ultrasonic (typically 30 to 50 kHz) wave velocity is measured continuously between a transmitter and a receiver located at the same depth in two tubes and which are progressively moved from the pile top to its bottom end (Fig. 4.24).

Principle of CSL measurements (http://www.ats-intl.com/expertise/geophysics.html)
The tubes are filled with water to achieve a good coupling and the test is performed when the concrete has hardened sufficiently (7 days is a common delay). The wavelength (80 mm in good concrete) provides a good resolution. As long as the first arrival time (FAT) and the energy are approximately constant, one may conclude than the concrete between the tubes is uniform and flaw-free. A marked delay in the FAT and/or a marked drop in energy indicate an inferior concrete or some anomaly (a FAT delay like 10 % is sometimes referred to as an “anomaly” when a 20 % delay is a suggested limit for a “defect” NFP 94-160-1, 2000). Of course any lack of parallelism between tubes can induce false interpretation. Figure 4.25 provides an example of how FAT and energy signals can be processed.

Map of velocity at a given depth (in feet/sec) (http://www.nci.cc/AFT/index.html)
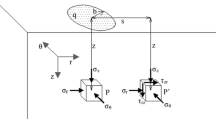
The process can be repeated by utilizing various combinations of access tubes to check around the shaft circumference and through its center (Fig. 4.26). It is also possible to perform tomography (the technique is then named CSLT) by varying the depth between the two probes and multiplying the ray-paths (Fig. 4.27). Its principles are identical to those of ultrasonic tomography. It is most commonly used when a defect has been identified by initial testing such as CSL. Tomography requires at least six scans per pile, which allows for a comprehensive assessment of the shaft quality.

Example of signal processing with CSL technique (after [Gray et al, 2008])

3D-imaging: cross-hole sonic logging tomographic result (after [Hussein et al, 2005])
Benefits and limits
Advantages of CSL testing include:
-
no limitation on shaft length for test applicability
-
provides location of defects along shaft length and in cross-section
-
can detect multiple defects
-
is not sensitive to soil type
-
in most cases data interpretation is relatively simple
The main disadvantage of the technique is that it requires placing access tubes prior to concreting. The tested volume is that of concrete between the tubes and it does not cover the concrete outside the steel cage.
Finally, the interpretation, using tomography, requires both experience and expertise, since, e.g. artefacts can be generated in areas with a low density of information. 3D tomography provides nice pictures but the data processing is slow (cannot be done on site) and the added value can be small when compared to the time and cost required.
3.4.3 Guidelines and standards for piles
-
ACI, Non destructive methods for the Evaluation of Concrete in Structures, ACI 228.2R-98, 1998
-
ASTM D5882-96, Standard test method for low strain integrity testing of piles, designation, 1996
-
ASTM D-6760 Standard Test Method for Integrity Testing of Concrete Deep Foundations by Ultrasonic Crosshole Testing, 1/2008.
-
Ciria Report 144, Integrity testing in piling practice (UK).
-
DGGT, German GeotechnicalSociety, WG 2.1., Empfehlungen des Arbeitskreises Pfähle, 2007.
-
NFP 94-160-1, Auscultation d’un élément de fondation, Partie I - Méthode par transparence, 10/2000.
-
NFP 94-160-2, Auscultation d’un élément de fondation, Partie II - Méthode par réflexion, 11/1993.
-
NFP 94-160-4, Auscultation d’un élément de fondation, Partie IV - Méthode par impédance, 3/1994.
4 Special techniques and enhanced methods
4.1 Possible enhancements
Special techniques and enhanced methods are non-standard approaches to either standard or non-standard problems. There are several reasons for methods being non-standard such as cost, being still under development or lack of qualified specialists. Enhanced methods are expansions and/or combinations of common methods whereas special techniques include methods newly developed or existing methods applied to new applications. Enhancements often concern data processing and imaging, thanks to increasing possibilities for computations. Among these enhancements, several can be quoted:
-
For GPR, Ultrasonics and Impact-Echo: Dense 3-D data acquisition, with automatic scanning systems
-
For GPR and Ultrasonics: full 3-D data processing, techniques using varying transmitter-receiver offsets
-
For GPR: Use of different polarizations
For all techniques, data fusion and automated combination of data from different methods into one dataset (see Chapter 8 for a detailed example on data fusion) offer new possibilities. For instance, for pile investigations, sonic echo and mobility techniques (§ 2.4.1) can be combined, mixing the information provided by the time-domain response of the sonic echo and the characteristic impedance measured with the mobility test. Thus the variation of impedance along depth, after corrections due to attenuation, is drawn in a diagram called “Impedance Log” (IL in Table. 4.2).
The question remains however of its interpretation since both the concrete quality and the pile geometry can explain variations in impedance. In addition, if a strong defect exists near the pile top, it can prevent any correct analysis of the wave propagation below.
4.2 Special techniques
4.2.1 For pavements and thin elements
The Spectral Analysis of Surface Waves (SASW) method can be potentially used to evaluate the thickness as well as the modulus profile of pavement sections. The outcome of the SASW test is the ‘dispersion curve’ which reveals the changes in phase velocity versus wavelength (or frequency). The inversion of pavement layer properties from the dispersion curve is a challenging task. For the traditional SASW test where only two receivers (at the time) are employed, the inversion concerns only the single fundamental dispersion mode. The inversion (or backcalculation) process involves minimizing the difference between the measured and theoretical dispersion curves (calculated for a set of assumed pavement sections) to find the matching pavement profile [Nazarian and Desai, 1993]. However, it was soon found that the fundamental mode dispersion curve obtained from the SASW test on pavements is dependent on the receiver locations and is actually formed by superposition of several modes of surface wave propagation [Rosset et al. 1990]. This finding led to the later inversion algorithms where the exact test set up is simulated to obtain the theoretical dispersion curve. Therefore the same distortions are reproduced in the theoretical dispersion curves as present in the measured dispersion curves. A variety of optimization algorithms have been applied to SASW backcalculation problem ranging from manual trial and error to neural network and simulated annealing [Williams and Gucunski, 1995], [Al-Hunaidi, 1998]. The backcalculation of pavement profile from the SASW test is computationally expensive and finding a unique solution of desired certainty remains a challenge.
A multi-channel variation of SASW test, the Multi-channel Spectral Analysis of Surface Waves or MASW, has been recently used in pavement evaluation applications [Ryden, 2004]. Unlike SASW, MASW takes into account higher modes of surface wave propagation [Park et al., 1999]. A corresponding two dimensional multi-modal inversion yields more accurate inverted pavement profiles, compared to SASW [Ryden and Park, 2006]. However, a multi-channel data collection adds to the complexity of field applications and data analysis.
A combination of SASW and GPR can provide complementary information regarding both the thicknesses and the material properties of pavement layers. The layer thickness information from GPR can significantly reduce the computational efforts necessary for SASW inversion. On the other hand, SASW provides invaluable information about the mechanical properties of pavement layers which cannot be obtained from GPR.
4.2.2 For deep foundations, shafts and piles
4.2.2.1 Single-hole sonic logging (SSL)
Also named “single hole ultrasonic test” (SHUT), SSL is a derivative of cross-hole testing. It has not been standardized. It was originally developed for cases where thepile was checked by core drilling, in order to increase the range of the inspection. The idea is simply to use the space left by coring for introducing two probes in the same hole. The technique has been adapted, with plastic or steel tube, and it has been shown that defects covering between 25 % and 65 % of the cross-section could be detected. It can be used in minipiles of small diameter in which it is difficult to install several tubes. It is however limited to defects adjacent to the tube and it is usually used only when a drilled shaft requires integrity assessment after construction.
4.2.2.2 Radioactive methods
Radioactive testing consists of lowering a gamma-gamma probe into an access tube. The gamma-gamma probe, which consists of a radioactive source and gamma photon detector separated by a length of shielded material, is lowered and raised within the tubes. During the test, gamma particles are emitted into the concrete. Some of the gamma particles are scattered back to the detector in the instrument. The test is performed continuously along the pile length with gamma count rates collected at set intervals. The counter connected to the probe gives a measure of the concrete density. Substantial drops in average bulk density readings from Gamma-Gamma tests are indicative of the presence of anomalies in the material surrounding the inspection tube. The range of inspection is limited to 75mm around the tube. It is the only method which gives high resolution information about concrete cover outside the reinforcement cage.
4.2.2.3 Parallel seismic testing
The principle of parallel seismic testing (PST) is comparable to that of sonic testing. It requires a small borehole in the ground parallel and close to the structure for housing a hydrophone or geophone (receiver). The length of this borehole must be larger than the assumed depth of the foundation. The main advantage of PST is that it does not need any hole within the concrete, making it well suited for existing structures. The sonic source is a shock on the head of the foundation to be investigated and the wave propagates through the pile, then through the soil between the pile and the adjacent borehole. The measurement is repeated while the receiver is progressively lowered in the borehole and a change of slope on the curve measuring the time of arrival of the wave against depth indicates the depth of the foundation. This technique provides the depth with a very good accuracy, if the borehole is near the pile. It also requires that the borehole is tubed and a good coupling (with injection) between the tube and the ground). PST results are influenced by voids and defects in the pile but the method is not suitable for their detection, as travel time variations may also be caused by soil heterogeneities.
This technique has been standardized:
-
ACI, Non destructive methods for the Evaluation of Concrete in Structures, ACI 228.2R-98, 1998
-
NFP 94-160-3, Auscultation d’un élément de fondation, Partie III - Méthode sismique parallèle (MSP), 5/1993.
4.2.2.4 Mise à la Masse (MM), Magnetic (MT) and Induction (IT) techniques
Several other techniques are available for the measurement of the length of reinforcement in concrete piles (which does not match the total pile length in all cases), sheet piles or steel piles. Mise à la masse (MM) and induction techniques (IT) are active techniques applying direct (MM) or alternating (IT) electrical current to the steel at the pile top (which must be accessible therefore). The resulting electrical or electromagnetic fields are measured by a sensor moving in a PVC cased borehole (max 1 m distance recommended). The field strength drops at the level of the lower end of the reinforcement/steel pile. The magnetic technique (MT) measures the natural magnetic field strength which is influenced by the reinforcement/steel pipe. MT is less accurate and sometimes difficult to interpret, but does not require access to the pile.
4.2.2.5 Combination of techniques
The combination of techniques can be used on the basis of the limitations of each single technique (for instance due to the need of access tubes) and on their ability. It is generally used to improve the quality of the assessment. For instance, the depth assessment in sonic techniques requires assumptions on the wave velocity. [Niederleithinger and Taffe, 2006] suggest, from measurements on a pilot test, to perform an additional parallel seismic test for one pile among the series to be tested. On this pile, the length being measured with a good accuracy, the velocity can be calibrated and this value can be used for the assessment in all piles in which only a sonic measurement will be performed.
5 Benchmarks and test sites
Test sites are purpose-built structures with known geometries and material properties. Test sites can be used in several ways such as:
-
Test if a method can solve a certain problem
-
Optimization of test methods
-
Comparison between different methods
-
Demonstration and training
It is not always easy to obtain accurate information on such test-sites, which are often designed within the framework of a specific research program, and do not offer open access to the public. The following section describes some permanent test sites that are available for professionals on request.
5.1 Pavements and sealings
5.1.1 Test deck for sealings (LRPC Autun)
Location: LRPC, Boulevard de l’Industrie, 71405 Autun, France
Contact: Christophe Aubagnac, LRPC
This test site has been designed to test non-destructive techniques for the detection of defects related to sealings. It is composed of four concrete slabs covered with waterproofing layers (Fig. 4.28).

LRPC test site, concrete slabs covered with different sealings having different defects
Three slabs are covered with different types of sealings having defined defects. The dimension of the concrete structures is 300*260*25 cm. They are covered with a precast mono-layer sheet, an 8/22 asphalt double-layer and an adhesive thin sheet.
5.1.2 Road test site (LCPC)
Location: LCPC, Route de Bouaye, Nantes, France
Contact: Xavier Derobert, LCPC, Route de Bouaye, 44340 Bouguenais, France, xavier.derobert@lcpc.fr
This test site (Fig. 4.29) has been designed in order to qualify the GPR performances used for pavement layer thickness measurements. Four different structures are implemented, with local metallic plates in order to confirm some particular interfaces.

Schematic structure of the road test site
5.2 Thin elements
5.2.1 Tunnels
Reference specimen at MFPA Leipzig, Germany
Contact: Prof. Dr. Frank Dehn, phone ++49341 6582145, dehn@mfpa-leipzig.de
The shell has a total thickness of 40 cm and is made of external shotcrete, a fiber mat (2mm), a sealing (2mm) and an inner shell (Fig. 4.30).

Test tunnel at MFPA Leipzig (after [Taffe and Gehlen, 2007])

Large Concrete Slab, BAM
5.2.2 Concrete slabs and walls
5.2.2.1 Large concrete slab (LCS)
Location: Federal Institute for Materials Research and Testing (BAM), Unter den Eichen 87, 12205 Berlin, Germany
Contact: Martin Krause, phone: ++49 30 8104 1442, martin.krause@bam.de
The large concrete slab (LCS) is a one sided slab built by theFederal Institute for Materials Research and Testing (Fig. 4.31). It is located in Berlin, Germany. The dimensions are 4m x 10m with a thickness of 0.3m. The LCS is divided in two sections. The first section contains tendon ducts of different diameters at different depths. Some of the ducts are intentionally ungrouted. The second section has areas with smaller thickness, precast honeycombs and a reference area with a steel plate for calibration purposes. Examples of measurements performed on this specimen have been given at §2.3.1. Others will be discussed in Chapter 5 (§5.5).
5.2.2.2 Concrete wall specimen at LRPC Lyon
Location: LRPC Lyon
Contact: Pierre Roenelle, LRPC, Lyon
A concrete wall in four parts has been built in 2003. The thickness varies from 18 to 51 cm. Many ducts have been inserted in the wall, with or without tendons (Figs. 4.32 to 4.34), and with several grouting defects [Roenelle, 2006].

The building of the test wall at LRPC, Lyon

Concrete specimen “Wall”, LCPC Lyon

Scanner for automated measurement at LCPC, Lyon
5.2.3 Slab foundations
BAM Slab Foundation Test Site
Location: Horstwalde, Germany
Contact: A. Taffe, Federal Institute for Materials Research and Testing (BAM), Tel + 49 30 8104-4244, Alexander.taffe@bam.de
For systematic thickness measuring subject to reinforcement ratio and slab thickness a specially designed foundation slab has been constructed [Taffe et al., 2005] with the following features:
-
Area: 5 x 5 m
-
2 sections, one of 75cm and one of 125cm thickness
-
Strip foundation (width 50 cm), height 50 cm below 70 cm slab
-
Sections with 10 different reinforcement ratios
-
Pile heads with diameter of 30cm below 70cm slab
The structure of the slab is shown in Fig. 4.35. Details of the specimen before concreting are depicted in Fig. 4.36. Measuring sticks are used to verify the real thickness after filling with concrete.

Drawing of the foundation with ten sections (A0-A4, B0-B4) of different reinforcement ratio as well as strip foundation and pile heads beneath the slab

Photo of the foundation’s inside before pouring the concrete. Measuring sticks as reference to measure true thickness
5.2.4 Pile foundation
Test piles have been regularly used to help NDE practitioners to develop and calibrate their techniques and material. For instance, in july 1988, FHWA (Federal Highway Administration) initiated a contract research study to examine drilled shafts for the effect of defects on performance, and to develop acceptance criteria for use by construction engineers to accept, reject, or modify a newly constructed drilled shaft. The study included the construction of 20 drilled shafts with and without defects for different soil sites located in California and Texas. All shafts were tested non-destructively using both surface reflection and direct transmission techniques to determine their effectiveness in identifying defects (http://www.fhwa.dot.gov/engineering/geotech/pubs/century/02.cfm).
In other cases, blind tests can be performed on real piles, and the efficiency of the technique can be checked at the end of the process by extracting the shaft. This can allow a company to demonstrate its ability to a contractor [Gray et al, 2008]. Test sites can also be used to quantify the ability of a given technique (or of an improved technique) to detect/localize/quantify model defects. These sites are often designed in relation with a company which wants to test its own material. Two such examples are:
-
A test site has been used at Auburn University, Alabama (USA), in relation with a material designer (Piletest) such as to show how model soil inclusions (sand bags fixed to rebars) can be detected on four test piles by CSL or SSL [Paikowsky et al, 2000].
-
A test site has also been designed in Israël [Amir, 2002], with ten short piles (diameter of350 mm and a typical length of 3.50 m). Eight of the piles contained pre-fabricatedvoids, made out of thick plywood and sheet metal boxes, at a depth ofbetween 1.50 and 2.00 from the top of the pile. CSL and SSL techniques were used, immediately after concreting, at 24 hours, 3 fays and 6 days.
Other test sites can be designed with a more ambitious objective: that of improving the scientific knowledge, the expertise of practitioners or the ND techniques. Two such examples are given below.
-
NDE test section of five shafts has been constructed at the National Geotechnical Experimentation Site (NGES) at Northwestern University, Michigan, to provide a controlled site where various nondestructive evaluation testing techniques could be performed (Fig. 4.37).

Cross-section of NGES deep foundation test site (after [Gassman and Finno, 2000])
This site is located in Evanston, Illinois, and it was selected by the National Science Foundation (NSF) and the FHWA as a NGES in 1992. The drilled shaft section was constructed in fall of 1994 to provide a full-scale site where different non-destructive evaluation methods could be conducted to evaluate their ability to determine the integrity of inaccessible deep foundations (http://www.iti.northwestern.edu/projects/NDE/chs_ch3.html#1). Two of these shafts were constructed with known defects (one with a horizontal crack, the second with a necking obtained with sandbags).Field test were PET, IE, CSL and PST, with the purpose of evaluating the ability of the cross-hole sonic logging test to identify the defects present in the shafts, and to determine the effects of the concrete age on the test results (four ages from 7 days to 1000 days were tested).
The “Deep Foundation Test Site” has been designed on the grounds of the University of Central Florida (USA) for the on-going and recurring testing for research and certification programs.The site is intended to be utilized to demonstrate various pile and drilled shafts, compare various load test methods, and test NDE methods like SE. It will also be possible to compare various analysis methods. In addition, the site will be utilized for the training of Florida Department of Transportation personnel in deep foundation installation and testing methods. To our knowledge, no experimental result has been yet published from this test-site (http://www.cee.ucf.edu/research/deep%20foundation/index.htm).
4.2.5 NDT test and validations site at Horstwalde
Location: Horstwalde, Germany
Contact: Ernst Niederleithinger, Federal Institute for Materials Research and Testing (BAM), Unter den Eichen 87, 12205 Berlin, Germany, phone: ++49 30 8104 1443, ernst.niederleithinger@bam.de
In the frame of the RuFUS project [Butcher et al., 2006] a foundation test site for various NDT techniques was set up (Fig. 4.38). So far a foundations slab (described above), 10 bored piles and a set of other concrete test objects exist. The test site was designed with help from other research institutions and the industry. A major upgrade is intended, including concrete elements from foundations, utilities and road and railroad infrastructure. The test site will be available on a long-term basis for research and education.

Pile test site under construction
Ten bored piles with 62 cm diameter and lengths between 8.5 and 12 m (three of them with flaws) are available at the moment (Fig. 4.39). So far they have been used to validate pile length measurements by the low strain method and the parallel seismic method.

Drawing of the pile test site with 10 piles with well defined pile length and location of defects
References
Al-Hunaidi M.O. (1998) Evolution-based generic algorithms for analysis of nondestructive surface wave tests on pavements, NDT&E International, Vol. 31, No. 4, pp. 273–280.
Al-Qadi I., Lahouar S., Loulizi A. (2003) GPR: From State-Of-the-Art to the State-Of-the-Practice, Proc. NDT-CE 2003, September 16-19 2003, Berlin, Germany.
Amir J.M. (2002) Single-Tube Ultrasonic Testing of Pile Integrity, www.piletest.com/papers/shut/Orlando%20%20200
Butcher A. P., Powell J. J. M., Skinner, H.D. (2006) Reuse of foundations for urban sites, IHS BRE Press, UK; 144 p.
Davis A.G. (2003) The non-destructive impulse response test in North America: 1985 – 2001, NDT&E International 36, pp. 185-193.
FDoT, 2000, Florida Department of Transportation, ResearchCenter, Tallahassee, Fl, RESEARCH TODAY, Fall 2000.
Gassman S.L., Finno R.J. (2000) Cutoff frequencies for impulse response test of existing foundation, J. Perf.Constructed Facilities, 14, 1, 11-21.
Gray K., Hussein M., Lewis C. (2008) Drilled shaft extraction, Const.Conf08, Florida DoT.
Hugenschmidt J. (2003) Non-destructive-testing of traffic-infrastructure using GPR, Proc. NDT-CE 2003, September 16-19, Berlin, Germany.
Hugenschmidt J., Mastrangelo R. (2006) GPR inspection of concrete bridges, Cement & Concrete Composites, 28, pp. 384-392.
Hussein M.H., Likins G. (2005) Deep foundations quality control and quality assurance testing method, Florida Eng. Society, 3/2005, p. 10-13.
Maser K. (1996) Evaluation of Pavements and Bridge Decks at Highway Speed Using Ground Penetrating Radar, Proceedings, ASCE Structures Congress XIV. Chigaco, Il, 15-18 April 1996.
Maser K., Scullion T., Roddis W. M., Fernando E. (1994) Radar for pavement thickness evaluation, Non-destructive Testing of Pavements and Backcalculation of Moduli, ASTM STP 1198, Philadelphia.
Nazarian S., Desai M.R. (1993) Automated surface wave method: field testing, Journal of Geotechnical Engineering, ASCE, Vol. 119, No. 7, pp. 1094-1111.
Niederleithinger E., Taffe A. (2006) Early stage elastic wave velocity of concrete piles, Cem. Concr. Composites, 28, 317-320.
Paikowsky S.G., Chernauskas L.R., Hart L.J., Ealy C.D., DiMillio A.F. (2000) Examination of a new cross-hole sonic logging system for integrity testing of drilled shafts, Application of stress-wave theory to piles, Nylam&Belm (eds), Balkema, Rotterdam.
Park C.B., Miller R.D., Xia J. (1999) Multi-channel analysis of surface waves, Geophycisc, Vol. 64, No. 3, May-June 1999, pp. 800-808.
Roenelle P. (2006) Contrôles, essais, mesures, Hors Série – l’Europe des END, sept. 2006.
Rosset J.M., Chang D.W., Stoke II K.H., Aouad, M. (1990) Modulus and thickness of the pavement surface layer from SASW tests, TRR, No. 1260, pp. 53-63.
Ryden N. (2004) Surface wave testing of pavements, Ph.D. thesis, LundUniversity, Lund, Sweden.
Ryden N., Park C.B. (2006) Fast simulated annealing inversion of surface waves on pavement using phase-velocity spectra“, Geophysics, Vol. 71, No. 4.
Shevaldykin V.G., Samokrutov A.A., Kozlov V.N. (2003) Ultrasonic Low-Frequency Short-Pulse Transducers with Dry Point Contact.Development and Application, Proc. Int. Symp. NDT-CE 2003, Berlin, Germany.
Taffe A., Gehlen Ch. (2007) Anwendung der Zuverlässigkeitsanalyse auf Messungen mit zerstörungsfreien Prüfverfahren am Beispiel der Tunnelinnenschalenprüfung, Beton- und Stahlbetonbau, Volume 102, Issue 12: 812-824.
Taffe A., Niederleithinger E. (2006) NDT investigation methods, Butcher, A.P., Powell, J.J.M. and H.D. Skinner (eds.); Reuse of Foundation For Urban Sites - A Best Practice Handbook, Berkshire, BRE Press, Kap. 6.3.3, pp. 47-55.
Taffe A., Krause, M., Milmann, B., Niederleithinger, E. (2005) Assessment of foundation slabs with US-echo in the re-use process, in Alexander, M., Beushausen H.-D., Dehn F., MoyoP. (eds), Proc. Int. Conf. on Concrete Repair, Rehabilitation and Retrofitting (ICCRRR), 21.-23.11.05, Cape Town, South Africa, pp. 525-530.
Van Koten H., Middendorp P. (1980) Equipment for integrity testing and bearing capacity of piles, Proc. Imtl. Seminar on the Application of Stress-Wave Theory on Piles, Stockholm, Sweden, pp 69-76.
Willet D. A., Rister B. (2002) Ground Penetrating Radar “Pavement Layer Thickness Evaluation”, Research Report KTC-02-29/FR101-00-1F, Kentucky Transportation Center, University of Kentucky, Lexington.
Williams T.P., Gucunski N. (1995) Neural networks for backcalculation of moduli from SASW test, Journal of Computing in Civil Engineering, ASCE, Vol. 9. No. 1, pp. 1-8.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 RILEM
About this chapter
Cite this chapter
Hugenschmidt, J., Krause, M., Breysse, D., Niederleithinger, E., Taffe, A. (2012). Control of thickness/dimensions of pavements, foundations, elements and piles. In: Breysse, D. (eds) Non-Destructive Assessment of Concrete Structures: Reliability and Limits of Single and Combined Techniques. RILEM State of the Art Reports, vol 1. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-2736-6_4
Download citation
DOI: https://doi.org/10.1007/978-94-007-2736-6_4
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-2735-9
Online ISBN: 978-94-007-2736-6
eBook Packages: EngineeringEngineering (R0)