
Abstract
To reduce the adverse effect of the unexpected vessel heave motion on the response of underwater payloads, a control strategy is presented for an active heave compensation system using an electro-hydraulic system driven by a double-rod actuator. An adaptive observer is designed to estimate the unmeasured system states and the unmodeled forces. An observer is also proposed to asymptotically reconstruct the vessel motion. By using these observers, the Lyapunov’s direct method and backstepping technique, an output feedback controller is proposed to force the heave compensation error to converge to a small bounded area around the origin. Simulations illustrate the effectiveness of the proposed control scheme.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In offshore installations and deep sea marine operations, one of the most important issues is how to provide safety and high operability of payloads. This means that the payload motion should be kept unaffected by the supporting vessel motion, since waves, wind and ocean currents can easily cause an unexpected motion of the vessel, which in turn has adverse effects on the cable connecting between the payload and the vessel. The unexpected horizontal motion of the vessel is often controlled by a dynamic positioning system. To reduce the adverse effects in the vertical direction, active heave compensation systems are usually been used.
The control problems for active heave compensation systems have been addressed by numerous researchers in the past. In [1], a linear control scheme was presented for an active heave compensation system. However, the authors assumed that the vessel motion due to waves was known, which is generally hard to be accomplished in practice. To remove this restriction, the jointed problems of wave synchronization and heave compensation were studied in [2, 3]. In both works, the authors assumed that only the heave acceleration was measured and its integrals were obtained via high-pass filters. In [4], a nonlinear controller for an electro-hydraulic system driven by a double-rod cylinder was proposed, whereas the vessel motion and acting force were estimated by disturbance observers. The authors in [5] designed an autopilot for the autonomous landing of a vertical take off and landing vehicle on a ship oscillating in the vertical direction, which was based on the approach introduced in [6]. An improved work was presented in [7], where the reconstruction of the wave disturbances was accomplished by using the adaptive external models proposed in [8]. For the system with time delays in sensors and actuators, a prediction algorithm was designed in [9] to predict the vessel motion.
This chapter focuses on active heave compensation control of an electro-hydraulic system driven by a double-rod actuator. An adaptive observer is proposed to estimate the system states and the force acting on the cable. By assuming that the vessel motion can be represented by a set of harmonics with known frequencies as [10], an observer is also developed to asymptotically reconstruct these harmonic signals. These observers are then implemented in the control design procedure. The control development and stability analysis are based on the Lyapunov’s direct method and backstepping technique.
2 Problem Formulation
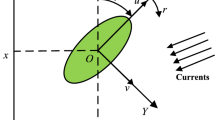
The active heave compensation system under consideration is depicted in Fig. 87.1. This system consists of an electro-hydraulic system driven by a double rod actuator, which is fixed to the vessel. The payload connects to the piston of the hydraulic system via a cable and a ball joint, where the cable is assumed rigidly. In Fig. 87.1, the reference water level is a horizontal line fixed to the earth. The heave motion of the vessel with respect to this level is denoted by z. The position of the piston with respect to the vessel is represented by \( x_{h} . \) L and d denote respectively the cable length and the desired position of the payload with respect to the reference water level.

Sketch of an active heave compensation system
Following [4], the scaled model of the active heave compensation system can be written as
where \( \theta_{i} (i = 1, \ldots ,8) \) are model parameters, \( \bar{P} \) and \( \bar{x}_{v} \) denote the scaled load pressure and spool displacement of the servo valve respectively, i is the control current input of the servo valve, and f(t) represents the resulting forces in the vertical direction acting on the piston. Generally, it is hard to derive the explicit expression of f(t) since it depends on too many factors. Hence, following [4], we treat it as a disturbance. On the other hand, it should be noted that only part of the states of the system (87.1) can be practically measured. To facilitate the control development, we assume that the velocity of the piston, \( \dot{x}_{h} , \) is the measured output.
In this chapter, the control objective is to make the heave velocity of the payload with respect to the reference water level, \( \dot{d}(t) \) (see Fig. 87.1), to track a desired velocity reference. On the other hand, one can see from Fig. 87.1 that
where the vessel motion z(t) can be generally decomposed into a set of harmonic oscillations and an additional slow time-varying term, i.e.,
where \( n \ge 1,\,A_{i} ,\,\omega_{i} \,\,{\text{and}}\,\,\phi_{i} \) are the amplitude, frequency and phase of the ith mode respectively. In this chapter, we assume that the term v(t) is a constant.
Then, from (87.2) and (87.3), one can see that the control objective is equivalent to the problem of stabilizing the following heave tracking error
where c(t) is the desired speed, and without loss of generality, we set it as a constant.
Note that (87.4) is generally not available for feedback since \( \dot{w}(t) \) is usually unknown, whereas its derivative, \( \dot{w}(t), \) is assumed to be measured via high precision accelerometers. To overcome this difficulty, we will also design an observer for w(t) in the next section. On the other hand, to facilitate the observer design procedure, the following assumptions for w(t) and f(t) are made.
Assumption 1
The frequencies of the harmonics, \( \omega_{i} (i = 1, \ldots ,n), \) are known, whereas the amplitudes and phases of the harmonics are not.
Assumption 2
The variables f(t) is globally bounded and there exists a nonnegative constant \( \sigma_{f} \) such that the first order time derivative of f(t) satisfies
Furthermore, since the heave position is left uncontrolled, the state \( x_{h} \) in (87.1) is negligible, and thus, the entire system can be reduced to a third-order system given by the following state space form
with \( x = [\dot{x}_{h} ,\bar{P},\bar{x}_{v} ]^{ \top} ,\,B = [0,0,\theta_{8} ]^{ \top } ,\,C = [1,0,0],\,D = [\theta_{3} ,0,0]^{ \top } \) and
It can be seen that the pair \( (A,B) \) is controllable, and \( (A,C) \) is observable.
3 Adaptive Observer Design
In this section, an adaptive observer will be developed for the unmeasured states x and f(t). And then, another observer for w(t) will be presented to asymptotically recover w(t) and its any order time derivatives. The first observer scheme is mainly improved on [4].
To estimate the states x, from (87.6), we interpret the following observer
where \( \hat{x} \) is the estimate of x, \( K_{1} = [k_{11} ,k_{12} ,k_{13} ]^{ \top } \) is such that the matrix \( (A - K_{1} C) \) is Hurwitz, \( \hat{f}(t) \) denotes the estimate of f(t) and is given by
where \( K_{2} = [k_{21} ,\,k_{22} ,\,k_{23} ]^{ \top } \) is a vector of control gains to be determined later.
Let \( \tilde{x} = x - \hat{x} \) and \( \tilde{f} = f - \hat{f} \) be the estimation errors. Then, from (87.6), (87.8) and (87.9), we yield the observation error dynamics as follows
Proposition 1
Consider the observation error dynamics (87.10). Under Assumption 2, if there exists a symmetric, positive-definite matrix M satisfying
with λ a positive constant and I an identity matrix, then the estimation errors\( \tilde{x} \) and \( \tilde{f} \) are globally convergent to a bounded area around the origin.
Proof
Consider the following Lyapunov function \( V_{0} = [\tilde{x}^{ \top } ,\,\tilde{f}]M[\tilde{x}^{ \top } ,\,\tilde{f}]^{ \top } . \) Differentiating it along the solutions of (87.10), we yield
Due to the Young’s inequality and \( \left| {\dot{f}} \right| \le \sigma_{f} , \) we have
where \( \lambda_{f} = \lambda - \varepsilon_{1} \) and \( \eta = {{\lambda_{f} } \mathord{\left/ {\vphantom {{\lambda_{f} } {\bar{l}}}} \right. \kern-\nulldelimiterspace} {\bar{l}}},\,\varepsilon_{1} \) is a positive constant such that \( \lambda_{f} > 0 \) and \( \bar{l} \) is the maximum eigenvalue of the matrix M. Then, one can see that \( V_{0} (t) \) globally converges to a ball around zero with the radius \( \sigma_{f}^{2} /\varepsilon_{1} \eta . \) As a consequence, the estimation errors \( (\tilde{x},\,\tilde{f}) \) converge to a ball centered at the origin with the radius \( {{\sigma_{f} } \mathord{\left/ {\vphantom {{\sigma_{f} } {\sqrt {\varepsilon_{1} \eta \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{l} } }}} \right. \kern-\nulldelimiterspace} {\sqrt {\varepsilon_{1} \eta \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{l} } }}, \) with, where \( \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{l} \) is the minimum eigenvalue of M.
In the rest of this section, we will design an observer for w(t). At first, it worth noting that the dynamics of w(t) can be expressed as
with \( W \in {\mathbb{R}}^{2n} ,\,S_{w} = {\rm{block}}\,{\rm{diag}}[S_{1} , \ldots S_{n} ] \) and \( C_{w} = [C_{1} , \ldots ,C_{n} ], \) where \( S_{i} = \left[ {\begin{array}{*{20}c} 0 & {\omega_{i} } \\ { - \omega_{i} } & 0 \\ \end{array} } \right],\,C_{i} = \left[ {\omega_{i}^{2} ,\,0} \right],\,\forall i \in [1,n]. \) Note that \( S_{w} \) and \( C_{w} \) are known under Assumption 1, and the pair \( (S_{w} ,C_{w} ) \) is observable. Since \( \ddot{w} \) is assumed to be a known variable, then the following observer is designed
where \( \hat{W} \) and \( \hat{\ddot{w}} \) are the estimates, \( K_{3} \in {\mathbb{R}}^{2n} \) is such that the matrix \( (S_{w} - K_{3} C_{w} ) \) is Hurwitz. This observer can be used to reconstruct any order time derivative of w(t).
Proposition 2
The output of system (87.12) defined as
yields converging estimate of the ith order derivative of w (t).
Proof
From (87.11), one can see that the i th order derivative of w(t) can be given as \( w^{(i)} = C_{w} S_{w}^{i - 2} W. \) Then, we have
Let \( \tilde{W} = W - \hat{W} \) be the estimation error and choose the Lyapunov function candidate \( V_{1} = \tilde{W}^{ \top } \tilde{W}. \) Differentiating \( V_{1} \) along the solutions of (87.11) and (87.12), we have
which implies that \( \mathop {\lim }\nolimits_{t \to \infty } \left\| {\tilde{W}} \right\| = 0 \) due to the fact that \( (S_{w} - K_{3} C_{w} ) \) is Hurwitz. Then, one can obtain \( \mathop {\lim }\nolimits_{t \to \infty } \left| {w^{(i)} - w^{(i)} } \right| = \mathop {\lim }\nolimits_{t \to \infty } \left| {C_{w} S_{w}^{i - 2} (W - \hat{W})} \right| = 0. \)
4 Controller Design
At first, we want to note that the structure of the system (87.8) allows us to use the Lyapunov’s direct method and backstepping technique for the controller design procedure, which can be divided into three steps.
-
Step 1.
Consider the Lyapunov function candidate \( V_{2} = 0.5\gamma_{{1}}\,{{\bar{e}^{2} }} , \) where \( \gamma 1 \) is a positive constant to be chosen later. The time derivative of \( V_{2} \) is given by
Let \( \hat{x}_{2e} = \hat{x}_{2} - \alpha_{2} \) be the error state with \( \alpha_{2} \) a virtual control of \( \hat{x}_{2} . \) Choosing \( \alpha_{2} \) as
with \( k_{e} \) a positive constant, and substituting (87.15) into (87.14), we have
-
Step 2.
To regulate the new error \( \hat{x}_{2e} , \) we choose the Lyapunov function candidate \( V_{3} = V_{2} + 0.5\gamma_{2} \hat{x}_{2e}^{2} \) with \( \gamma_{2} > 0. \) The dynamics of \( V_{3} \) satisfies
Let \( \hat{x}_{3e} = \hat{x}_{3} - \alpha_{3} \) be the virtual control error, and \( \alpha_{3} \) is given by
with \( k_{x} \) a control gain to be determined later, and
Substituting (87.18) and (87.19) into (87.17) and according to the expression of \( \dot{\alpha }_{2} , \) we yield
with \( \bar{k}_{12} = k_{e} k_{11} \theta_{1}^{ - 1} + k_{12} . \)
-
Step 3.
This is the final step. To regulate the error state \( \hat{x}_{3e} , \) we consider the Lyapunov function \( V_{4} = V_{3} + 0.5\gamma_{3} \hat{x}_{3e}^{2} \) with \( \gamma_{3} > 0. \) The time derivative of \( V_{4} \) is
Then, we choose the input i as
with
where \( k_{i} \) is a control gain, \( \bar{k}_{13} = k_{13} + \theta_{6}^{ - 1} k_{x} \bar{k}_{12} ,\,\zeta_{1} = \theta_{4} + \theta_{1}^{ - 1} \theta_{2} (k_{e} - \theta_{2} ) \) and \( \zeta_{2} = \theta_{5} - k_{e} + \theta_{2} . \) Substituting (87.22) and (87.23) into (87.21) and following (87.20) and the definition of \( \alpha_{3} , \) we have
with \( \zeta_{3} = - \theta_{2} k_{11} {C \mathord{\left/ {\vphantom {C {\theta_{2} \theta_{6} }}} \right. \kern-\nulldelimiterspace} {\theta_{2} \theta_{6} }} \) and \( \zeta_{4} = - \theta_{3} {{(k_{x} + k_{e} + \theta_{2} )} \mathord{\left/ {\vphantom {{(k_{x} + k_{e} + \theta_{2} )} {\theta_{2} \theta_{6} }}} \right. \kern-\nulldelimiterspace} {\theta_{2} \theta_{6} }}. \) Then, we can state our main result of this chapter in the following theorem.
Theorem 1
Consider the system (87.6) with the output-feedback controller (87.22) and the observers given in (87.8) and (87.12). Under Assumption 1 and 2, the heave compensation error\( e(t) \)asymptotically tends to a small bounded area around the origin.
Proof
From (87.8) and (87.9), we can rewrite (87.24) as
with \( \Upomega_{i}^{ \top } \, \in {\mathbb{R}}^{3} (i = 1,2,3) \) and \( \Upomega_{i} \, \in {\mathbb{R}}\ (i = 4,5,6) \) the appropriate vectors and scalars, respectively. By using the Young’s inequalities and from Proposition 1, after a lengthy but simple calculation, we have
with \( \bar{k}_{e} = k_{e} \gamma_{1} \varepsilon_{2} {{(\gamma_{1} \theta_{1} + 2)} \mathord{\left/ {\vphantom {{(\gamma_{1} \theta_{1} + 2)} 2}} \right. \kern-\nulldelimiterspace} 2},\,\bar{k}_{x} = k_{x} \gamma_{2} - {{\gamma_{1} \theta_{1} } \mathord{\left/ {\vphantom {{\gamma_{1} \theta_{1} } {2\varepsilon_{2} - {{\varepsilon_{3} (\gamma_{2} \theta_{6} + 2)} \mathord{\left/ {\vphantom {{\varepsilon_{3} (\gamma_{2} \theta_{6} + 2)} 2}} \right. \kern-\nulldelimiterspace} 2}}}} \right. \kern-\nulldelimiterspace} {2\varepsilon_{2} - {{\varepsilon_{3} (\gamma_{2} \theta_{6} + 2)} \mathord{\left/ {\vphantom {{\varepsilon_{3} (\gamma_{2} \theta_{6} + 2)} 2}} \right. \kern-\nulldelimiterspace} 2}}},\,\bar{k}_{i} = k_{i} \gamma_{3} - {{\gamma_{2} \theta_{6} } \mathord{\left/ {\vphantom {{\gamma_{2} \theta_{6} } {2\varepsilon_{3} - \varepsilon_{4} }}} \right. \kern-\nulldelimiterspace} {2\varepsilon_{3} - \varepsilon_{4} }} \) and \( \Lambda = \sigma_{f}^{2} (\varepsilon_{1} \eta \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{l} )^{ - 1} [\sum\nolimits_{i = 1}^{3} {{{(\| {\Upomega_{i} }\| + | {\Upomega_{i + 3} }|^{2} )} \mathord{/ {\vphantom {{(\| {\Upomega_{i} }\| + | {\Upomega_{i + 3} }|^{2} )} {2\varepsilon_{i + 1} }}}\kern-\nulldelimiterspace} {2\varepsilon_{i + 1} }}} ], \) where \( \varepsilon_{i} (i = 2,3,4) \) are chosen such that the control gains \( \bar{k}_{e} ,\,\bar{k}_{x} \) and \( \bar{k}_{i} \) are positive. Then, following the proof of Proposition 1, one can conclude that the error states \( (\bar{e},\,\hat{x}_{2e} ,\,\hat{x}_{3e} ) \) globally asymptotically converge to a bounded ball centered at zero with the radius \( \sqrt {{ \Lambda \mathord{\left/ {\vphantom { \Lambda {\bar{\eta }}}} \right. \kern-\nulldelimiterspace} {\bar{\eta }}}} , \) where \( \bar{\eta } = {{2\min (\bar{k}_{e} ,\,\bar{k}_{x} ,\,\bar{k}_{i} )} \mathord{\left/ {\vphantom {{2\min (\bar{k}_{e} ,\,\bar{k}_{x} ,\,\bar{k}_{i} )} {\max (\gamma_{1} ,\,\gamma_{2} ,\,\gamma_{3} )}}} \right. \kern-\nulldelimiterspace} {\max (\gamma_{1} ,\,\gamma_{2} ,\,\gamma_{3} )}}. \) Furthermore, it is not hard to check that this radius can be made arbitrarily small by choosing the gains, \( k_{e} ,\,k_{x} \) and \( k_{i} , \) sufficiently large.
For e(t) from Proposition 1, 2 and above result, we have
This means that the trajectory of e(t) reduces to a bounded value as time goes to infinity, which completes this proof.
5 Simulation Results
To illustrate the effectiveness of the proposed controller and observer, we carry out some simulations in this section. The system parameters are given by: \( \theta_{1} = 390,\,\theta_{2} = 0.04,\,\theta_{3} = 0.001,\,\theta_{4} = 490.75,\,\theta_{5} = \theta_{6} = 1.0,\,\theta_{7} = 157.233,\,\theta_{8} = 1.02{\text{e}}7 \) and \( f(t) = 1000 + \sin (15t). \) The desired velocity is \( c = 0. \) The harmonics \( w(t) \) is set as
The controller and observer gains are chosen as: \( k_{e} = 100,\,k_{x} = k_{i} = 150,\,K_{1} = [500,\, - 490.75,\,0]^{ \top } ,\,K_{2} = [0.04,\,0,\,]^{ \top } \) and \( K_{3} = [2,\,0,\,4,\,0,\,0,\,5]^{ \top } . \) The initial conditions of the system and observer are selected at the origin. The simulation results are depicted in Figs. 87.2 and 87.3.

The time evaluation of e(t)

Short presentations of the estimation errors
From Fig. 87.2, one can see that the tracking error \( e(t) \) converges a small area around the origin as expected. The plots in Fig. 87.3 show a short time presentation of the convergence of the observation errors. It can be seen that the estimation error \( \ddot{w} - \hat{\ddot{w}} \) is asymptotically stable and the error \( \dot{x}_{h} - \dot{\hat{x}}_{h} \) does not converge to zero due to the fact that the term \( f(t) \) is time-varying.
6 Conclusions
In this chapter, a control strategy for an active heave compensation system is presented. For the system with unknown disturbances and unmeasurable states, two observers are designed respectively to estimate the system states and asymptotically reconstruct the vessel motion represented by a set of harmonic signals. By using the Lyapunov’s direct method and backstepping technique, a output-feedback tracking controller is presented. The effectiveness of the proposed control strategy is tested by means of simulations.
References
Korde UA (1998) Active heave compensation on drill-ships in irregular waves. Ocean Eng 25:541–561
Johansen TA, Fossen TI, Sagatun SI et al (2003) Wave synchronizing crane control during water entry in offshore moonpool operations-experimental results. IEEE J Ocean Eng 28:720–728
Skaare B, Egeland O (2006) Parallel force/position crane control in marine operations. IEEE J Ocean Eng 31:599–613
Do KD, Pan J (2008) Nonlinear control of an active heave compensation system. Ocean Eng 35:558–571
Marconi L, Isidori A, Serrani A (2002) Autonomous vertical landing on an oscillating platform: an internal-model based approach. Automatica 38:21–32
Serrani A, Isidorim A, Marconi L (2001) Semiglobal nonlinear output regulation with adaptive internal model. IEEE Trans Autom Control 46:1178–1194
Messineo S, Serrani A (2009) Offshore crane control based on adaptive external models. Automatica 45:2546–2556
Serrani A (2006) Rejection of harmonic disturbances at the controller input via hybrid adaptive external models. Automatica 42:1977–1985
Küchler S, Mahl T, Neupert J et al (2011) Active control for an offshore crane using prediction of the vessel’s motion. IEEE/ASME Trans Mechatronics 16:297–309
Messineo S, Celani F, Egeland O (2008) Crane feedback control in offshore moonpool operations. Control Eng Pract 16:356–364
Acknowledgments
This work was supported by the National Hi-Tech Research and Development (863) Program of China (Grant No. 2007AA09Z215).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer Science+Business Media B.V.
About this paper
Cite this paper
Li, JW., Ge, T., Wang, XY. (2012). Output Feedback Control for an Active Heave Compensation System. In: He, X., Hua, E., Lin, Y., Liu, X. (eds) Computer, Informatics, Cybernetics and Applications. Lecture Notes in Electrical Engineering, vol 107. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-1839-5_87
Download citation
DOI: https://doi.org/10.1007/978-94-007-1839-5_87
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-1838-8
Online ISBN: 978-94-007-1839-5
eBook Packages: EngineeringEngineering (R0)