
Abstract
A compact 2D wind sensor made up of an integrated, single chip, double channel flow sensor and a PMMA cylinder is proposed. The flow sensor is a standard micro calorimeter designed with a commercial CMOS process and thermally insulated from the substrate by means of a post-processing technique. The cylinder has two orthogonal active sections with an original channel configuration that connects the outer surface of the cylinder surface to the flow sensor. The optimization of the channel configuration allows to obtain a cosine dependence of the measured flow on the wind direction.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Wind sensors are widely employed for meteorological monitoring and forecast, instrumental navigation assistance and airport danger condition detection. Recently, the increased awareness for the quality of life in urban and industrial areas has favored the development of compact units for monitoring the concentration of dangerous pollutants. In these devices, an anemometer capable of detecting both the direction and velocity of the local air circulation plays a crucial role. Unfortunately, the anemometer has been only marginally involved in the continuous scaling down of the sensors that led to the production of very compact acquisition units. The reason is that most commercial anemometers are still based on the traditional “cup and vane” model. Alternative solutions, represented by ultrasonic [1] and macroscopic thermal anemometers [2], are either too expensive or too power hungry for application in low cost, battery powered sensor units. On the opposite side, MEMS (Micro Electro-Mechanical Systems) anemometers can be effectively miniaturized and use acceptable power levels but are too fragile to be directly exposed to the wind.
Recently, we have proposed an original approach [3, 4] that makes use of microchannels to probe the pressure distribution around a cylinder exposed to the air stream. Figure 43.1a shows the previously proposed three channel structure [3, 4], where the channels communicate with the cylinder lateral surface at points placed along three different diameters. It has been demonstrated that, with a proper choice of angle ?, it is possible to produce a pressure difference (across H1, H2) depending only, in a non linear monotonic fashion, on the wind velocity component along a reference axis of the channel structure. Using two structures identical to that of Fig. 43.1a, rotated by 90°, and measuring the corresponding pressure differences is possible to derive the wind direction and intensity. In the device proposed in Ref. [3] the pressure differences are transformed into flow rates, which are measured with two distinct MEMS flow sensors. The MEMS structures operate inside channels that protect them against direct exposure to the wind.

a Cross sections of the cylinder active area in the case of the previous three channel structure and b the proposed five channel improvement
In this work we propose an improvement of the previously proposed device consisting in: (i) use of a five channel structure to improve precision and (ii) use of a single chip, double channel flow sensor to improve miniaturization.
2 Device Design
The proposed five channel structure is depicted in Fig. 43.1b. Cubic spline approximations of pressure distribution data collected in Ref. [5] have been used to estimate the pressure difference dependence on the wind incidence angle and optimize angle ?1 and ?2 to obtain a sinusoidal relationship. Sweeping the angles ? i from 0 to 90º by a step of 1º, we found the optimum values ?1 = 21º and ?2 = 53º.
The calculated flow rate Q x between H1 and H2, normalized to the value at ? = 0º, for different Reynolds numbers is shown in Fig. 43.2a. It can be noted that the approximation of the ideal function cos(?) is good in the whole velocity range. The greater deviation from the ideal curve has been found for low values of wind direction ?, as visible in the enlarged view shown in Fig. 43.2b where the behavior obtained with a three channel structure is also reported for comparison. It can be noted that the five channel structure led to a better approximation of the ideal cosine function.

a Calculated flow rate Q x as a function of the wind direction ? for different Reynolds numbers; b comparison between three and five channel structures for Re = 100 and low ? values
The angular precision of an anemometer based on the five channel structure has been compared to that of the previous three channel structure over a wide velocity range and the results are shown in Fig. 43.3. Note that, with the new five channel structure, the angular error is less than ± 1º over the whole velocity range.

Comparison between the simulated angular error obtainable with the three and five channel structures
3 Prototype Fabrication
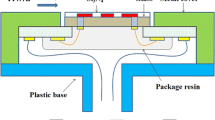
As far as the prototype fabrication is concerned, we have exploited a recently introduced low cost packaging technology [6] applied to a chip including several thermal gas velocity micro detectors.
The chips were designed and fabricated using the BCD6 process of STMicroelectronics and subsequently post-processed to produce the required thermal insulation between the sensing structures and the substrate.
A cylinder including the two active sections has been fabricated by piling up different Poly Methyl Methacrilate (PMMA) disks where the required channel layout has been milled using a computer controlled precision milling machine. The air flows derived by the pressure differences produced across points H1–H2 of the two orthogonal structures are conveyed to the single chip flow sensor by means of PMMA elements fabricated using the same milling machine.
The overall dimensions of the resulting prototype, shown in Fig. 43.4, are only 5 × 4 × 2 cm.

Photograph of the assembled device
4 Conclusions
The design and fabrication of a compact 2D wind sensor have been described. A micromachined, single chip, double channel flow sensor is connected to the outer surface of a PMMA cylinder by means of two orthogonal active sections. Each section has a five channel structure whose geometry has been optimized in such a way that the measured flow is proportional to the cosine of the wind direction. The calculated angular error is less than ± 1º for velocities up to 30 m/s. Preliminary experimental tests confirm the calculated device response.
References
Han D, Kim S, Park S (2008) Two-dimensional ultrasonic anemometer using the directivity angle of an ultrasonic sensor. Microelectron J 39:1195–1199
Ruser H (2005) Smart robust wind sensor using a simple optimization procedure. In: Proceedings IEEE Sensors 2005, pp 672–675
Bruschi P, Dei M, Piotto M (2009) A low-power 2-D wind sensor based on integrated flow meters. IEEE Sensor J 9:1688–1696
Piotto M, Dei M, Pennelli G, Bruschi P (2009) A miniaturized 2D solid state anemometer based on thermal flow sensors.In: Proceedings of Eurosensors XXIII, Procedia Chemistry, vol 1, Sept 2009, pp 1463–1466
Zdravkovich MM (1997) Flow around circular cylinders: a comprehensive guide through flow phenomena, experiments, applications, mathematical models and computer simulation. Oxford University Press, Oxford, U.K, pp 1–109
Bruschi P, Dei M, Piotto M (2009) A single chip, double channel thermal flow meter. Microsyst Technol 15:1179–1186
Acknowledgment
The authors wish to thank the STMicroelectronics of Cornaredo (Italy) for fabricating the chips.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer Science+Business Media B.V.
About this paper
Cite this paper
Piotto, M., Bruschi, P., Butti, F., Pennelli, G. (2011). 2D Anemometer Based on Multichannel Single Chip Flow Sensor. In: Neri, G., Donato, N., d'Amico, A., Di Natale, C. (eds) Sensors and Microsystems. Lecture Notes in Electrical Engineering, vol 91. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-1324-6_43
Download citation
DOI: https://doi.org/10.1007/978-94-007-1324-6_43
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-1323-9
Online ISBN: 978-94-007-1324-6
eBook Packages: EngineeringEngineering (R0)