
Abstract
Deliberate illegal discharges of oil at sea can be reduced by law enforcement and via improving the monitoring and controlling capabilities. During the last decades, satellite based Synthetic Aperture Radar (SAR) images have been consistently and progressively used to achieve global monitoring of the seas. Satellite based oil spill detection is nowadays an operational service in Europe (CleanSeaNet run by EMSA), placing increasingly strict requirements in terms of detection performance, i.e. false alarms and missed detections mitigation. In this work, an overview of oil spill detection from satellite based SAR is given, with particular attention to the recent advances and trends in optimising and enhancing these achievements for operational use. Confidence level, ancillary data, data fusion and SAR data quality assessment are discussed together with their impact on the final “reliability” of the oil spill monitoring application.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Synthetic Aperture Radar
- Synthetic Aperture Radar Image
- Detection Capability
- Ancillary Data
- Synthetic Aperture Radar Data
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
8.1 Introduction
Deliberate oil discharging is a well known source of marine pollution, calling for automatic and reliable detection to allow timely intervention. On account of this large coverage, all-weather and day and night capabilities, SAR technology has long been recognised as one of the most suitable instruments for oil spill monitoring especially over wide areas.
Following the European Directive 2005/35/EC, which entered into force in September 2005, the European Maritime Safety Agency (EMSA) is required to provide assistance to the European Union in tracing discharges by satellite monitoring and surveillance. The CleanSeaNet service has been developed from research activities on oil spill detection, becoming an operational asset within the European Union Coastal Member States, Norway, and probably soon also Iceland. This service is currently implemented delivering Near Real Time (NRT) oil spill alerts and positions. As a consequence, oil spill detection from SAR images is required to deliver reliable results that can be efficiently used by the Coastal States as decision support tools to efficiently coordinate the operations for combating and monitoring oil pollution.Footnote 1
In this paper we present a set of advances in SAR satellite based oil spill detection that relate to the integration of additional information into the classification process. The work reflects the JRC experience in the field (see Muellenhoff et al., 2007; Ferraro et al., 2007; Vespe et al., 2009; Ferraro et al., 2009). The primary End User’s need in this field is the assurance of truthfulness of the delivered information, which translates into the ability to associate a degree of confidence of the detection to each oil spill candidate as presented in this work. This is crucial in order to evaluate the status of alert to be considered by the competent authorities for legal infringements detection and potential environmental damage estimation. After a brief description of common methodologies applied to SAR based oil spill detection, the oil spill detection problem is introduced through the description of data quality analysis. This process aims at defining the suitability of the image data for the service application. The portions of the data considered “usable”, i.e. exploitable for the derivation of meaningful results, can be further analysed. As described in the following, the detected oil spill candidates can be cross checked with other ancillary data (metocean, contextual and maritime traffic data). This shall subsequently increase the reliability of the service by combining information on oil spill candidate location with the relevant degree of “risk” and “detection capability” properties of the area of interest. For instance a traffic lane shall increase the likelihood (“risk”) of having and oil spill, as opposed to low wind areas that reduce the performance of the SAR based algorithm (“detection capability”). Ultimately, this paper introduces a possible way of automatically fusing the mentioned heterogeneous information.
8.2 On the Use of SAR Imagery to Detect Oil Spills
Some oil on the sea surface dampens the short gravity-capillary waves generated by the wind (Alpers and Hühnerfuss, 1988), leading to reduced Bragg scattering in radar images. This results in a reduced radar backscatter to the sensor, thus creating a darker signature in the image over the area of interest. This can be observed if the local wind is greater than a threshold (typically 2–3 m/s) which, amongst other factors, is dependent on the water salinity and temperature. When the wind speed is too high, on the other hand, the short waves receive enough energy to counterbalance the damping effect of the oil film, and if the sea-state is fully developed, the turbulence of the upper sea layer may break and/or sink the spill or a part of it. As a result the oil spill is not detectable from the image.
The reliability of spill detection based on SAR data only is not fully robust to guarantee consistent and automatic satellite-based detection of oil spills. This is a consequence to the distinctive variability of radar based oil signatures, their spatial features, and the interaction with the local environment. Moreover, other than oil spills, a number of phenomena originate Bragg scattering reduction, making it difficult to discriminate between the so called “look-alikes”. Such phenomena can be grouped as follows:
-
Man-related (e.g. ship wakes, floating production facilities drain emissions);
-
Atmospheric (e.g. wind sheltering, rain cells, atmospheric instability areas);
-
Oceanographic (e.g. internal waves, coastal upwelling, eddies, current shears, bathymetry/currents interaction, grease ice);
-
Natural/Biological (e.g. natural seepage, fish oil in cold waters, algae blooms, pollen from plants and trees, coral spawn, natural surfactants).
Many of these false alarm sources become even more pronounced in low wind conditions, as a consequence of the reduced Bragg waves and therefore backscatter of the sea surface. Several research investigations on techniques and algorithms to detect oil spills from SAR data have been conducted in the last years (e.g. Solberg et al., 1999; Del Frate et al., 2000; Fiscella et al., 2000; Pavlakis et al., 2001; Karathanassi et al., 2006), as also recently reviewed by Topouzelis (2008). The typical functions implemented by SAR based oil spill detection are based on magnitude detected products and can be summarised as follows.
-
1.
Image pre-processing: the image is pre-processed through well known algorithms especially tailored on the particular application. For oil spill detection, the radiometric resolution of the image is a key parameter and often is advantaged against spatial resolution using 2-D edge preserving filters (e.g. Lee, Local Region, Frost etc). Such filters increase the Equivalent Number of Looks (ENL) with the effect of reducing the speckle noise and therefore enhancing the contrast of dark patches over the image. The image is commonly land-masked in order to reduce the number of processed pixels, thus decreasing the computational burden of the algorithm.
-
2.
Image segmentation: the pre-processed image is then segmented in order to extract the dark patches of interest. The segmentation process can be thought of as a Constant False Alarm Rate (CFAR) algorithm that, on the basis of the local sea backscattering statistics, applies a NRCS (Normalised Radar Cross Section) threshold below which the pixels are indicated. The pixels are then organised in adjacent sets commonly referred to as image objects.
-
3.
Feature extraction: the image objects are analysed in detail, leading to the estimation of a set of features previously selected. Such features are related to shape, internal texture and neighbourhood contrast. The feature selection process is a key process for any classification algorithm. As regards oil spill classification, the problem is often reduced to the discrimination between “oil spill” and “look-alike”. Separating these two classes in feature space requires an accurate optimisation.
-
4.
Classification: for each object, the values related to the selected features are compared with a database of templates in order to evaluate the class to which the object belongs. A preliminary screen on size of the objects is commonly performed in order to exclude residual speckle objects that are of no interest to the analysis. The classification function has been approached using a variety of algorithms spanning from statistical, to associative mapping techniques. An overview, as well as a review of the oil spill classification literature, can be found in Brekke and Solberg (2008), and Topouzelis (2008).
The use of satellite based SAR oil spill detection has been considered taking into account operational sensors, e.g. Radarsat-1 and 2, ERS-2, Envisat, Alos, Terrasar-X and CosmoSkyMed. The primary products used are ScanSAR magnitude detected images. However, the advances made by polarimetric oil spill detection foresee the developing of relevant algorithms for operational use. Among them, fully polarimetric data have been demonstrated to be useful in discriminating look-alikes from oil spills using circular polarization coherence (CPC) and polarimetric anisotropy (Fortuny-Guash, 2003) based on Cloude and Pottier developed polarimetric decomposition (Cloude and Pottier, 1997). Nunziata et al (2008) propose the use of the Co-polarised Phase Difference (CPD) between HH and VV returns to discriminate biogenic from mineral oil because of the relevant different damping properties.
ScanSAR modes have been predominantly selected for oil spill detection because of the large covered swath and less stringent spatial resolution requirements. Nevertheless, there are issues related to residual scalloping and elevation beam boundary that often reduce the data “usability” for this application. Novel products shall be operationally available for this purpose. In particular, the TopSAR radar mode (Zan et al., 2006) has been recently implemented by TerraSAR-X by azimuth beam steering within the different sub-swaths. Differently from ScanSAR, TopSAR allows a wide swath coverage with nearly uniform signal to noise ratio, therefore reducing scalloping and range dependent radiometric errors (Meta et al., 2007).
8.3 From Research to Operational Services
In this section, a number of aspects related to operational oil spill detection are presented. The main parameters to be taken into account, when designing operational SAR based oil spill detection, are the following:
-
Minimum detectable dark feature contrast under variable wind speed conditions (which primarily translates to radiometric resolution but is influenced by noise level, incidence angle, polarisation, ENL);
-
Instantaneous swath (large swath is usually preferred for global routine monitoring);
-
Ability to describe geometric properties of the detected dark patch (shape structure and area features);
-
Ability to estimate the age of the spill (as derived from the shape);
-
Revisit frequency (no repeat-pass interferometry over the sea, so not necessarily with the same beam);
-
Tasking lead time (i.e., how fast can an acquisition be planned);
-
Delay in delivering the results (detected spills positions at the end user after overpass);
-
Ability to acquire imagery at any time of the day (and not just e.g. at dawn or dusk passes, because some activities at sea do not occur at those hours);
-
Availability (related to scheduling conflicts) and accessibility (how easy is for the End User to task satellites);
-
Reliability (primarily in the sense of reliability of detection, i.e. detection probability and false alarm rate).
Most of the above mentioned aspects are strictly related to the specific SAR instrument performance and cannot be varied from an application point of view. Nevertheless, the “reliability” of the oil spill detection service can be improved through (i) the accurate analysis of the delivered image, as described in the section on quality analysis, and (ii) the investigation of ancillary data describing the area of interest, as discussed in the section on the use of ancillary data.
8.3.1 Legal Framework
Scientific studies focusing on remote sensors capacities to detect oil spills generally do not take into consideration the legal framework. Marine oil pollution by vessels, termed “operational oil pollution”, includes various types of discharges of oil and oily mixtures, as a result of ships’ daily routine operations. Some of these, such as oily ballast water and tank washing residues, relate to tankers only. However, all types of ships may cause pollution discharging into the sea oil coming from engine room wastes, bilge waters and, only in rare cases, used oil.
The International Convention for the Prevention of Pollution from Ships, 1973, as amended by the Protocol of 1978 thereto (MARPOL 73/78) is aimed at minimizing and eliminating pollution from ships. The Convention covers two main subjects:
-
(i)
the special construction and equipment rules for the prevention of accidental pollution;
-
(ii)
the circumstances in which discharges into the sea are authorized.
The general provision in art.6 of MARPOL 73/78 contains the obligation to co-operate in the detection of violations and the enforcement of the provisions of the Convention, using all appropriate and practicable measures of detection and environmental monitoring, adequate procedures for reporting and accumulation of evidence. Each Contracting Party to MARPOL 73/78 is obliged to incorporate the regulations in its national legislation, including provisions for prosecution of any discharge above legal limits.
The oil discharge regulations in the Convention apply differently depending on whether or not the sea area has been designated a “special area”. Almost all the seas around Europe have been designated Special Areas for oil pollution. Only the Norwegian Sea, the Bay of Biscay and the Atlantic Iberian Coast are not covered by the Special Area status.
The limit of 15 parts per million (ppm) is the key parameter to identify legal discharges of ballast and from machinery spaces, in special areas, and legal discharges from machinery spaces, outside special areas. Requirements to legally discharge from cargo tanks outside special areas are less strict. In this last case, oil discharges are allowed above the 15 ppm limit.
Following a detailed study, the International Maritime Organization (IMO) recognized that it is not possible to see oily mixtures at sea with oil content below 15 ppm (Resolution MEPC.61(34) of 9 July 1993 on Visibility Limits of Oil Discharges). Therefore, not all visible (by eye or by Remote Sensing) oil spills are necessarily illegal. But, visible and/or detectable oil discharges from ships, observed in a MARPOL special area, are illegal without any doubt.
Following the detection of a spill, the major issue is the prosecution of the polluter, but two main principles co-exist: the Nationality of the ship and the Geographical position of the ship. The principle of the Nationality of the ship is also defined as principle of jurisdiction of the Flag State. On the other hand, the possibility to apply the jurisdiction relevant for the position of the ship could concern: the jurisdiction of the State where the ship is sailing (principle of Coastal State) or the jurisdiction of the port where the ship is in (principle of Port State).
There are two fundamental instruments available to the international community for taking action against the perpetrators of illegal acts of marine pollution:
-
MARPOL 73/78 Convention;
-
1982 United Nations Convention on the Law of the Sea (UNCLOS).
MARPOL 73/78 does not deviate from the exclusive jurisdiction of the Flag State. On the other side, UNCLOS enlarges the jurisdiction of the Coastal States in the Exclusive Economic Zone (EEZ), in addition to the sovereign rights of the territorial sea. UNCLOS provisions break through the traditional supremacy of the jurisdiction of the Flag State in respect of discharge violations in areas outside the jurisdiction of a Coastal State: when a ship is voluntarily within a port, the Port State is granted extensive judicial powers in respect of a discharge violation committed by that ship outside its internal waters, territorial sea or EEZ. The provisions of UNCLOS concerning this universal Port State jurisdiction represent a key factor to the successful prosecution of the polluters.
Also, the European Union has taken specific actions to strongly combat ship-source pollution through a system of sanctions in case of intentional acts or serious negligence. Directive 2005/35/EC of 7 September 2005 on ship-source pollution and the introduction of penalties for infringements, recently amended by Directive 2009/123/EC of 21 October 2009, establishes that sanctions will be applicable to any person – including the master, the owner, the operator, the charterer of a ship or the classification society – who has been found to have caused or contributed to illegal pollution intentionally or by means of serious negligence. This Directive aims also to enhance cooperation among Member States to detect illegal discharges and to develop methods to identify a particular discharge as originating from a particular ship.
8.3.2 Image Quality
In Europe, oil spill detection from satellite SAR has become fully operational with the CleanSeaNet service. The image analysis for slicks is carried out mostly by visual inspection. For ship detection, on the other hand, automatic detection software is used, still with a final visual verification. In recent years, Europe has seen a widespread build-up of close-to-operational ship detection capabilities. This increased (near-) operational use of SAR images for ship and oil spill detection is confronting service providers with several SAR image quality issues that impact on the final product quality. A number of these issues yield an increase of the false positives, others introduce “non-exploitable” areas within the image leading to potential false negatives in the detection process.
Some SAR image particularities, well known to SAR engineers but perhaps less so to the downstream service providers, can cause serious problems with the service product, such as azimuth and range ambiguities giving rise to false ship detections. In such cases, the SAR image may be in accordance with specifications, but the impact of some image artifacts on the final product is still problematic, e.g. when interference, or nadir ambiguities (Fig. 8.1) are present. In other cases, operationally delivered images are not in accordance with specifications, e.g. when processing errors occur due to wrong Doppler parameters estimation or when the radiometric instrument performance is degraded (e.g. scalloping effect, Fig. 8.2). This will obviously also lead to wrong outcomes, since the degree of reliable exploitation of SAR data is commensurate to the instrument performance compliance with the expected requirements. The distinction between specification compliance and application suitability can be defined when comparing the expected image quality with the specific sensor performance or the application requirements respectively. However, here below a brief list of parameters relevant to maritime applications is presented.


Nadir return partially covering an oil spill in a Radarsat-1 Wide Mode image © MDA/CSA 2008


Pronounced scalloping from Envisat ASAR Wide Swath Mode © ESA 2008
The detection of oil spills often prefers coverage extension over spatial resolution performance. This is mainly because of the large size of operational or accidental oil spills of interest. As a consequence, the fulfillment of radiometric indicators has a higher priority than geometric indicators. Nonetheless, geolocation accuracy has to be considered as crucial for operational oil spill detection services. Also the spatial resolution performance reduction might lower the capability to describe the shape of detected dark patches and small features useful to correctly classify oil spills from look-alikes.
Radiometric resolution and radiometric error deviations from the specifications may lead to missed oil spill detections. In particular, radiometric resolution degradation leads to reduced contrast between Bragg scattering and potential dark features. Moreover, the hydrophobic nature of mineral oil leads to specific backscattering textures undetectable with reduced radiometric resolution. Finally, reduced radiometric resolution performance decreases the potential age indications of the oil spill.
Image radiometric error degradation might bias the backscattering statistics of the area of interest, yielding either missed detections or false positives. The sensitivity degradation is also a general key issue that affects this application: a reduced sensitivity performance progressively decreases the backscattering transitions between Bragg scattering and potential oil spills with the result of reducing the detection capabilities.
Data integrity issues, other than affecting the backscatter statistics and therefore the detection process, may mask actual spills. For this reason they have to be taken into account in the image quality estimation process by identifying non exploitable areas.
All these parameters have to be properly checked before operating oil spill detection, as a component of the application quality assessment.
8.3.3 From Confidence Level to an Alert System
In order to make the SAR image analysis objective and to provide decision support to the user, the detected oil spills are usually classified according to confidence levels. Such levels are supposed to describe the probability that an observed dark feature in the satellite image is related to the presence of an oil spill. The SAR derived oil spill detection probability estimation has been mathematically explored as an intrinsic aspect of oil spill classification, which fundamentally computes the likelihood that the detected dark area and its extracted features are related to oil spill. In particular, Fiscella et al. (2000) introduced a nearest neighbours classifier based on the Mahalanobis metric applied to the feature vector, and compared its results to a statistical classifier. Nirchio et al. (2005) investigated a Fischer discriminant analysis approach applied to the selected features. Nevertheless, the SAR based probability estimation should be integrated with additional criteria in order to become a more effective tool for the End User. It is worth mentioning also that some of these criteria and their correspondent weight within the decision making process, are very National and Regional dependent.
New trends in confidence level estimation involve different sources of data, linking the SAR derived information to ship traffic routes, metocean and other context-specific information. For this reason we are observing a progressive transition from a three-level SAR based Confidence output to a more articulated Alert System that includes additional criteria. This is summarised by Ferraro et al. (2009). The application output shall consist of a product that delivers additional information not only in terms of reliability but also concerning the related alarm extent of the detection (i.e. potential impact and polluter detection capability).
8.3.4 Ancillary Data
In order to increase the reliability of oil spill classification, environmental data have been used as additional help to the human operator (Tahvonen and Pyhalahti, 2006; Muellenhoff et al., 2007).
The ancillary data can be grouped into two main conceptual datasets, Risk of Pollution and Detection Capability. The former contains information about areas at risk due to its proximity to potential pollution sources. These data contain information about distance from main traffic lanes, world ports distribution, pipeline runs, wreckage risk, oil rig locations. Detection Capability Dataset holds information about specific ocean and atmospheric phenomena that decrease the detection capability of oil spills based on SAR imagery. This dataset includes among others: low wind conditions, Sea Surface Temperature (SST) derived cold water fronts, air-sea interactions, current shears, biogenic oily films, etc.
The generated maps of Risk of Pollution and Detection Capability degree could be used for cross checking with the automated detected outcomes, in order to effectively assign the correspondent level of reliability to oil spill candidates. The data described here are not related to the specific time of SAR image acquisition. On the contrary, such maps aim at describing monthly and seasonal trends in the areas of interest.
These maps could be considered a potential decision making support and validation tool that could be easily adapted to stakeholders requirements.
8.3.4.1 Contextual Data – Risk of Pollution
The contextual data are exploited to identify and properly map areas of influence of both ports and main ship corridors. Specifically, data sources used for the traffic density estimations are (i) ICOADS data for long term observational records, and (ii) Automated information System (AIS) for almost NRT and more accurate assessments. Whereas for port influence areas, the World Port Index data are injected, weighted on the basis of the availability of oil terminals. Once processed and identified the main areas at risk, both data sources are integrated and mapped into a GIS layer to present the risk information integrated output.
8.3.4.2 Metocean Data – Detection Capability
The information considered here is related to metocean data that directly or indirectly could be exploited to identify phenomena affecting SAR imagery, in particular the oil spill detection process. Specifically, the data sources used by the authors are described below:
-
Wind Data: can be thought of as the main driving force generating Bragg waves, therefore directly affecting the detection capabilities. The data are retrieved from SeaWinds on QuikSCAT monthly averaged products, containing information about wind speed and direction 10 m above the sea surface. The data are processed and parameterised then in two variables (1) wind speed range for mapping areas according to their suitability for oil spill detection, and (2) wind fronts for mapping wind masses interaction associated with potential decrease of wind velocity and thus yielding false positives.
-
Sea Surface Temperature (SST): variations on the SST may affect the stability of the atmosphere above. This effect may have an impact on the wind stress and indirectly modify the sea surface modulation. False alarms are likely to happen in the oil spill detection process under this specific circumstance. Water temperature strong gradients are therefore mapped over SST layer. The Data for the mapping of water fronts was retrieved from (1) AVHRR PathFinder V5 product providing temporal monthly averages as a result of the re-analysis of older AVHRR data, and (2) MODIS/AQUA: derived from the MODIS IR channels using two channels in either the thermal IR (11–12 μm) or channels in the mid-IR region (3.8–4.1 μm).
-
Chlorophyll-A: such information is injected as an indicator of biogenic activity that, under certain favourable circumstances of quantity of light energy and inorganic nutrients, may produce the release of biogenic oil films, i.e. look-alikes. The relevant data are retrieved from the JRC Mersea (Mersea website) monthly averaged regional products. The detection capability degree is derived using Chlorophyll-A concentration threshold. This threshold is set on the basis of the extensive analysis of ENVISAT SAR imagery over the Mediterranean Basins (oligothrophic environment) with synchronous Chlorophyll-A measurements from MERIS sensor.
-
Geostrophic Currents: sea currents alter short waves patterns mainly in areas where currents interact (e.g. gyres, current shears, eddies, etc.) by accumulating surfactants on certain areas of the converging/diverging waters. The approach intends to identify sea currents fronts where their interaction may yield the generation of dark/bright patches. Geostrophic velocity anomalies derived from AVISO altimeter information are used, specifically Absolute Dynamic Topography products both for Mediterranean region and Global extent.
Once all relevant ancillary sources are processed and potential affecting phenomena isolated, the outcome is integrated into a single map. Given the ocean-atmosphere interface interactions complexity and the interrelation between measurable variables, a superposition effect was approached for the detection capability derivation. The more affecting undesired phenomena occur over an area at the same time, the lower the detection capability. Figure 8.3 depicts the results of the methodology used when mapping the detection capability degrees over EU Areas.


Integrated Detection Capability map for the month of July
8.3.4.3 Joint Ship-Oil Spill Detection
Ship detection is considered a key asset for oil spill detection. This is because it can allow the derivation of the potential polluter position within the illuminated area if the acquisition is close in time with the actual discharge. Satellites SAR images are in fact unable to identify the pollution culprit (i.e. the name of the ship that polluted). At best, satellite can detect the position of the probable pollution culprit. Nonetheless, by using back-propagation techniques, the SAR detected ship can be also identified by correlating other maritime surveillance sensors, e.g. Automatic Identification System (AIS), Long-Range Identification and Tracking (LRIT), Vessel Monitoring System (VMS), Satellite-AIS and coastal radar tracks. Such techniques are based on oil spill dispersion and drift models (Ferraro et al., 2007). The degree of confidence of such identification is proportional to the time lag between the relevant information and the sensors intrinsic uncertainties. Ship detection is sometimes used (Solberg et al., 1999) as additional information to increase the likelihood of the detection being an oil spill, although this does not increase the probability of true positive. Conversely, connected ship and oil spill events shall raise the alert level of the detection since it can be thought of as a relevant factor for follow-up activities concerning the prosecution of potential polluters.
8.3.5 Data Fusion
The oil spill features extracted from SAR images can be combined with the ancillary data described in the previous section using data fusion algorithms. This process is expected to augment the “reliability” of the detection simply by adding into the automatic application the information related to the likelihood of the specific context to present oil spills and look-alikes. In this section, a possible way to approach data fusion of SAR and ancillary data for oil spill detection is presented focussing on the detection of operational oil spills, i.e. oily bilge water, deliberate tank washing residues, and unsegregated ballast water discharge.
The ancillary dataset can be organised into homogeneous tiles presenting a certain degree of spatial uniformity in terms of information content. Artificial Neural Networks can then be used to ultimately link the SAR data to the ancillary data, ultimately leading to the estimation of a reliability index of the oil spill classification. This is based on the vector X whose elements X i are in the range [0,1] and represent the different levels of information related to the area of interest. Specifically, X 1 is the oil spill classification level derived from SAR image processing only. The particular classification algorithm implemented follows a fuzzy logic approach, where the set of fuzzy rules correspond to each detected feature. The next element of the information vector, X 2, is based on the homogeneity of the backscattering surrounding the dark area, measured by the standard deviation of the NRCS data. Reduced backscatter homogeneity would increase the likelihood of observing look-alikes. However, high data homogeneity, in conjunction with low wind conditions, still decreases the detection capabilities. This shows the non-linear relationship between the elements of the vector X in the evaluation of the final output, motivating the selection of associative mapping methodology for the data fusion algorithm.
The ancillary data information content (X 3, X 4 and X 5) is then mapped using empirical functions. For instance, the wind intensity information is retrieved from QuikSCAT data and processed according to an empirical function taking into account that:
-
A threshold at 2 m/s is set since it is the minimum wind speed to generate gravity-capillary waves,
-
15 m/s can be thought of as the wind speed upper bound for oil spill detectability,
-
At moderate to high wind speed conditions, the probability of observing look-alike decreases (Pavlakis et al., 2001).
In similar ways, it is possible to derive the oil spill high risk probability areas (X 4) and reduced oil spill detectability areas (X 5). Specifically, X 4 is generated from contextual (distance from traffic lanes and world ports distribution) and from the fusion of different levels of metocean information (SST gradient, wind turbulences, Chlorophyll-a concentration). Low values of X 5 represent a high probability of the detection being a look-alike, whereas high X 4 values identify areas with high probability of having an oil spill.
The SAR detected dark patches labelled by X 1 and the relevant surrounding homogeneity X 2 are then fused with the set of described ancillary data X 3, X 4 and X 5, forming the heterogeneous information vector X that represents the input for the data fusion engine as illustrated in Fig. 8.4. The probability P(H|X) estimation of the events H 1 “oil-spill” or H 2 “look-alike” given the input vector X is performed using supervised Feed-forward Artificial Neural Networks (FANNs) approach, whose output can be interpreted as the posterior probability P(Event|input). The training phase of the FANN is achieved using a set of positive association examples obtained from validated spills.


Associative mapping, the network learns to associate a new input layer vector X to a reliability R through positive and negative examples
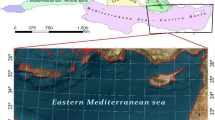
The performance of the algorithm is illustrated for the Radarsat-1 image in Fig. 8.5. The image has been previously pre-processed (i.e. de-speckled, radiometrically normalised in order to equalise the incidence angle sea backscatter influence, and land masked).


Oil spill detections (red) having \(P\left( {H_1 |X} \right) > 0.85\), and false alarms (pink) discriminated as output of the Feed Forward Artificial Neural Network (Radarsat-1 image © CSA/MDA/EMSA 2007)
The oil spill detection based on SAR data only exhibits a number of look-alikes related to low wind and atmospheric instability. Such phenomena can be in this case automatically resolved with the aid of ancillary data and the data fusion approach described. The classification reliability \(P\left( {H_1 |X} \right) = 0.96\) for oil spills is increased with respect to the SAR based performance only \(X_1 = 0.94\), while the false positive classification output level \(\left[ {1 - P\left( {H_2 |X} \right)} \right] = P\left( {H_1 |X} \right) = 0.62\) for look-alikes is decreased in relation to \(X_1 = 0.62\).
8.4 Conclusion
The evolution of SAR based oil spill detection towards integrated information systems has been presented. Starting from the data quality issue, and based on a consolidated legal framework, it is possible to increase the “reliability” of currently operational services with the aid of ancillary data. The composite output, which takes into account risk of pollution and detection capability maps, can eventually lead to the generation of higher level alarms. An example of SAR image analysis using ancillary information has also been illustrated showing how the system separation capabilities can increase in the feature space, improving the performance over the classic SAR based detection. This shall provide in the future more effective decision making tools for End Users supporting the formulation of follow-up strategies after detections.
One of the major limitations of SAR based oil spill detection is the poor quantity and typology estimation of the detection. This is a consequence of the impossibility of determining the film thickness and class from the SAR image in an accurate way. The amount and type of spilled oil is essential information in order to accurately quantify the nature of the pollution. Further investigation on additional technologies should be conducted in order to improve operational services in the future.
Notes
- 1.
See CLEANSEANET website http://cleanseanet.emsa.europa.eu (accessed 01.12.2009).
References
Alpers W, Hühnerfuss H (1988) Radar signatures of oil films floating on the sea and the Marangoni effect. J Geophys Res 93:3642–3648
Brekke C, Solberg A (2008) Classifiers and confidence estimation for oil spill detection in ENVISAT ASAR images. Geosci Rem Sens Lett IEEE 5(1):65–69
Cloude SR, Pottier E (1997) An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans Geosci Rem Sens 35(1):68–78
Del Frate F, Petrocchi A, Lichtenegger J, Calabresi G (2000) Neural networks for oil spill detection using ERS-SAR data. IEEE Trans Geosci Rem Sens 38:2282–2287
Ferraro G, Baschek B, de Montpellier G, Njoten O, Perkovic M, Vespe M (2009) On the SAR derived alert in the detection of oil spills according to the analysis of the EGEMP. Mar Pollut Bull 60(1):91–102
Ferraro G, Bernardini A, David M, Meyer-Roux S, Muellenhoff O, Perkovic M, Tarchi D, Topouzelis K (2007) Towards an operational use of space imagery for oil pollution monitoring in the Mediterranean Basin: a demonstration in the Adriatic Sea. Mar Pollut Bull 54:403–422
Fiscella B, Giancaspro A, Nirchio F, Pavese P, Trivero P (2000) Oil spill monitoring in the Mediterranean sea using ERS SAR data ERS-Envisat Symposium, Göteborg, 16–20 October
Fortuny-Guasch J (2003) Improved oil slick detection and classification with polarimetric SAR, Proceedings of the POLinSAR 2003, ESA-ESRIN, Frascati, Italy, 14–16 January
Karathanassi V, Topouzelis K, Pavlakis P, Rokos D (2006) An object-oriented methodology to detect oil spills. Int J Rem Sens 27(23):5235–5251
Mersea Ocean Colour Portal, http://mersea.jrc.ec.europa.eu/ (accessed 01.12.2009)
Meta A, Mittermayer J, Steinbrecher U, Prats P (2007) Investigations on the TOPSAR acquisition mode with TerraSAR-X. IEEE IGARSS’07, Barcelona (E)
Muellenhoff O, Bulgarelli B, Ferraro G, Topouzelis K (2007) The use of ancillary metocean data for the oil spill probability assessment in SAR images. 14th Symposium on Environmental Pollution and Its Impact on Life in the Mediterranean Region, Seville (E)
Nirchio F, Sorgente M, Giancaspro A, Biamino W, Parisato E, Ravera R, Trivero P (2005) Automatic detection of oil spills from SAR images. Int J Rem Sens 26(6):1157–1174
Nunziata F, Gambardella A, Migliaccio M (2008) On the use of dual-polarized sar data for oil spill observation, IEEE IGARSS’08, Boston, MA
Pavlakis P, Tarchi D, Sieber A, Ferraro G, Vincent G (2001) On the monitoring of illicit discharges – a reconnaissance study in the Mediterranean sea. European Commission, EUR 19906 EN. Available on: http://serac.jrc.it/midiv/pub/jrc_illicit_study.pdf
Solberg A, Storvik G, Solberg R, Volden E (1999) Automatic detection of oil spills in ERS SAR images. IEEE Trans Geosci Rem Sens 37:1916–1924
Tahvonen K, Pyhalahti T (2006) The use of environmental data in reliability assessment of oil spill detection by SAR imagery. IEEE IGARSS’06 3688–3691
Topouzelis KN (2008) Oil spill detection by SAR images: dark formation detection, feature extraction and classification algorithms. Sensors 8(10):6642–6659
Vespe M, Posada M, Ferraro G, Bulgarelli B, Greidanus H, Djavidnia S (2009) Oil spill detection based on SAR and Metocean/Contextual Data Fusion. 33rd International Symposium on Remote Sensing of Environment, Stresa (I), 4–8 May
Zan FD, Monti Guarnieri A (2006) Topsar: terrain observation by progressive scan. IEEE Trans Geosci Rem Sens 44(9):2352–2360
Acknowledgements
This work has been partly funded within the scope of the European Maritime Safety Agency – EC Joint Research Centre collaboration for the development and support of satellite monitoring techniques for oil spill detection.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer Science+Business Media B.V.
About this chapter
Cite this chapter
Vespe, M., Posada, M., Ferraro, G., Greidanus, H. (2010). Perspectives on Oil Spill Detection Using Synthetic Aperture Radar. In: Barale, V., Gower, J., Alberotanza, L. (eds) Oceanography from Space. Springer, Dordrecht. https://doi.org/10.1007/978-90-481-8681-5_8
Download citation
DOI: https://doi.org/10.1007/978-90-481-8681-5_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-90-481-8680-8
Online ISBN: 978-90-481-8681-5
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)