
Abstract
A quasi-periodic orbit possesses the properties of both a periodic orbit and a chaotic orbit, which are almost periodic and aperiodic, respectively. Whereas the stabilization of a periodic orbit is widely discussed, that of a quasi-periodic orbit remains an enigma because of its aperiodicity. We focus on a quasi-periodic orbit on an invariant closed curve in discrete-time systems, which is the simplest case of dynamics on a high-dimensional invariant torus. In this case, a quasi-periodic orbit can be characterized by its rotation number, which is reflected in the design of control methods. We apply three control methods, the external force control, the delayed feedback control, and the pole assignment method, to stabilize an unstable quasi-periodic orbit. Although these control methods have been used to stabilize unstable periodic orbits, we show that they are also applicable to unstable quasi-periodic orbits.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
A quasi-periodic orbit possesses the properties of both a periodic orbit and a chaotic orbit. Let \({x}_n\) be a quasi-periodic orbit in a discrete-time system. The quasi-periodic orbit is aperiodic in the sense that we cannot choose a period \(d\) such that \({x}_{n+d}={x}_n\). Aperiodicity is the main property of a chaotic orbit. At the same time, the quasi-periodic orbit is almost periodic in the sense that we can choose a recurrence time \(d\) such that \(||{x}_{n+d}-{x}_n||<\varepsilon \) for a small positive \(\varepsilon \) and any \(n\). Since the definition of almost periodicity holds for a periodic orbit in which \({x}_{n+d}={x}_n\), a periodic orbit is a special case in almost periodicity.
In dynamical system theory, several control methods are available to stabilize an unstable periodic orbit, such as the OGY method [10] and the delayed feedback control [13]. In control theory, control methods to stabilize a fixed point (or an equilibrium) have been discussed from various viewpoints. Especially, in discrete-time systems, since a periodic orbit can be described by a fixed point by using a composition of a map, the stabilization is reducible to that of a fixed point. In this sense, the stabilization of a quasi-periodic orbit presents a challenging problem because the stabilization is not reducible to a fixed point due to the aperiodicity of the quasi-periodic orbit.
In general, quasi-periodic orbits are dynamics defined on a high-dimensional invariant torus [2]. In this chapter, we focus on the simplest case of dynamics defined on an invariant closed curve in discrete-time systems. In this case, a quasi-periodic orbit is characterized by its rotation number. We explain that a quasi-periodic orbit is associated with an irrational rotation via its rotation number, which is reflected in the design of control methods.
We apply the external force control, the delayed feedback control, and the pole assignment method, to stabilize an unstable quasi-periodic orbit. These control methods have been used to stabilize an unstable periodic orbit. We show that these control methods are also applicable to an unstable quasi-periodic orbit.
2 Properties of Quasi-periodic Orbit on Invariant Closed Curve
In this section, we summarize the properties of a quasi-periodic orbit on an invariant closed curve. The rotation number introduced by Poincaré is an important invariant in a quasi-periodic orbit on an invariant closed curve [14]. If a certain phase is determined in the quasi-periodic orbit, the rotation number is defined by the average phase difference for an iterate of a map. We consider a one-dimensional map:
where \(\theta _n\) is the phase and \(f:\mathbb {S}\rightarrow \mathbb {S}\) is the orientation preserving homeomorphism of the circle \(\mathbb {S}=\mathbb {R}/\mathbb {Z}\). The circle \(\mathbb {S}\) implies the set of real numbers modulo integers, i.e., only the fractional part of the phase \(\theta _n\) is considered. To calculate the phase difference, we lift \(f\) to a map \(F:\mathbb {R}\rightarrow \mathbb {R}\) such that \(f(\theta )=F(\theta )\) modulo integers and \(F(\theta +m)=F(\theta )+m\) for any integer \(m\). By considering the lifted dynamics \(\theta _{n+1}=F(\theta _n)\) and averaging the phase difference \((\theta _{n+1}-\theta _n)\), the rotation number \(\omega \in [0, 1]\) is calculated by:
It has been proved that the rotation number \(\omega \) is unique independently of the initial phase \(\theta _0\). Although this is the simplest case of a one-dimensional system, several numerical approximation methods of rotation numbers have been proposed [1, 11, 14] and we can obtain the rotation number from higher-dimensional systems.
We consider an \(M\)-dimensional discrete-time system having a quasi-periodic orbit on an invariant closed curve:
where \({x}_n\in \mathbb {R}^M\) is the \(M\)-dimensional state vector and \({F}:\mathbb {R}^M\rightarrow \mathbb {R}^M\) is the function representing the system. If the rotation number is irrational, the quasi-periodic orbit is topologically conjugate to the irrational rotation [9]:
where \(\theta _n\in \mathbb {S}\). If the state \({x}_n\) is in the quasi-periodic orbit, the following relation holds:
where \({\psi }:\mathbb {S}\rightarrow \mathbb {R}^M\) is the homeomorphism from the phase to the state.
Using the irrational rotation, we can understand that the quasi-periodic orbit is aperiodic. The irrational rotation (8.1) is solved as follows:
We first consider the case that \(\omega \) is rational, i.e., \(\omega =p/q\) for coprime integers \(p\) and \(q\). Then, \(\theta _q=\theta _0+p\). In the circle \(\mathbb {S}\), the integer \(p\) implies zero because the rotation returns to the same phase. Therefore, the dynamics are periodic (\(\theta _q=\theta _0\)). On the other hand, in the case of the irrational rotation number, \(n\omega \) is never an integer for any \(n\). Therefore, there is no period \(d\) such that \(\theta _d=\theta _0\) and \({x}_d={x}_{0}\) from the topological conjugacy (8.2).
We can also understand that the quasi-periodic orbit is almost periodic. The irrational rotation number \(\omega \) can be approximated by a rational number:
where \(p\) and \(q\) are coprime integers. If we consider the period \(q\), the following relation holds:
Since the integer \(p\) is regarded as zero in \(\mathbb {S}\), the difference between these phases is \(q|\varepsilon |\). In general, we can choose a specific \(q\) such that the order of \(|\varepsilon |\) is limited [8] by:
Since the difference \(q|\varepsilon |\) is less than \(1/(2q)\), we can obtain a smaller difference for a larger \(q\). From the topological conjugacy (8.2), we can choose a period \(q\) for a small \(\varepsilon '>0\) and any \(n\):
Therefore, the quasi-periodic orbit is almost periodic in the period \(q\).
The approximation theory of irrational numbers by rational numbers shows that a continued fraction gives us a good representation [8]. The irrational rotation number is represented by the infinite continued fraction:
where \(a_1,a_2,a_3,\ldots \) are positive integers. If we stop the continuation of fractions in a finite order, the resulting continued fraction is a rational number. This finite continued fraction is called a convergent. The convergent gives us a good approximation of the irrational rotation number. Actually, the rational number \(p/q\) in which (8.3) holds is a convergent [8]. Therefore, the almost periodicity of the quasi-periodic orbit is associated with the continued fraction expansion of its rotation number.
3 Unstable Quasi-periodic Orbit
As an example of systems, we use a coupled map lattice with asymmetric connections [7]:
where \(x_n,y_n,z_n\in \mathbb {R}\) are the states of the system and \(f\) is the logistic map \(f(x)=1-\alpha x^2\). In this section, we discuss the mechanism for the generation of unstable quasi-periodic orbits of the system.
If the three states synchronize, i.e., \(x_n=y_n=z_n\), the system (8.4) is reduced to the one-dimensional logistic map:
Therefore, the system (8.4) has all possible solutions of the logistic map as the synchronization solutions although those solutions may be unstable. Using the solutions of the logistic map, we represent a synchronization fixed point as follows:
The stability of the fixed point is determined by the eigenvalues of a Jacobian matrix of the system. The Jacobian matrix \(J^*\) at the fixed point is represented as follows:
where \(\gamma =f'(x^*)=1-\sqrt{4\alpha +1}\). The Jacobian matrix has a real eigenvalue and a conjugate pair of complex eigenvalues:
If the absolute values of all eigenvalues are less than one, the fixed point is stable.

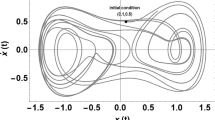
Stable and unstable quasi-periodic orbits of the coupled map lattice (8.4). a The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.7,0.02,0.5)\), in which the eigenvalues are \(|\mu _1|<1<|\mu _{2,3}|\). The solid circle shows the stable quasi-periodic orbit. The gray dot shows the unstable fixed point. The dashed line shows the synchronization set. b \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\), in which \(|\mu _1|,|\mu _{2,3}|>1\). The dotted circle shows the unstable quasi-periodic orbit. The period-2 points are stable in this case (shown as black dots)
We consider two cases in which the fixed point is destabilized by the distinct settings of the eigenvalues: (a) \(|\mu _1|<1<|\mu _{2,3}|\) and (b) \(|\mu _1|,|\mu _{2,3}|>1\). We show the dynamics of cases (a) and (b) in Fig. 8.1a and b, respectively. The dashed line shows the synchronization set (\(x_n=y_n=z_n\)) in which all synchronization solutions occur. The fixed point exists in the synchronization set (shown as the gray dot). In case (a), since the absolute value of the complex eigenvalue \(|\mu _{2,3}|\) is greater than one, the Neimark-Sacker bifurcation occurs. Then, the system is desynchronized and the stable quasi-periodic orbit emerges around the unstable fixed point (Fig. 8.1a).
In case (b), a quasi-periodic orbit exists similarly to case (a) because \(|\mu _{2,3}|>1\). However, since \(\mu _1\) is less than -1, the period-doubling bifurcation occurs at the same time. The quasi-periodic orbit is stable on its stable manifold as shown in Fig. 8.1b. However, the outer states except the stable manifold converge to the stable period-2 points. Therefore, this quasi-periodic orbit is unstable and has saddle-type instability. Using the control methods, we aim to stabilize this unstable quasi-periodic orbit.
4 External Force Control
The external force control was proposed by Pyragas to stabilize unstable periodic orbits [13]. The feedback input is defined by the difference between the current state and the external force that is the unstable periodic orbit itself. The control system is defined by:
where \(K\) is the matrix of the feedback coefficients, \({u}_n\) is the feedback input,
and \({y}_n\) is the external force. If the unstable periodic orbit is stabilized, the feedback input vanishes (i.e., \({y}_n-{x}_n=0\)). Therefore, only a small external force is used to stabilize the unstable periodic orbit [13].
To apply the external force control to stabilize the unstable quasi-periodic orbit, it is necessary to determine the orbit itself in advance. If we find the stable manifold, we would be able to determine the unstable quasi-periodic orbit because the orbit is stable on it. In general, however, it is difficult to determine the stable manifold analytically. Fortunately, a method that numerically estimates the orbit on the stable manifold has been proposed based on a bisection method [6].

Bisection method to find the stable manifold. The two initial points are given. When each point is mapped (shown as 0, 1, and 2), the midpoint and the initial point 2 approach each other. The initial point 1 and the midpoint are more proximately located on either side of the stable manifold than the two initial points
We consider two initial points on either side of the stable manifold and their midpoint (Fig. 8.2). When each point is mapped by the system equation, the midpoint and the initial point 2 approach each other, whereas the initial point 1 is separated from them. Therefore, by observing the dynamics, we can identify the side on which the midpoint is located relative to the stable manifold. We replace the initial points with the midpoint and the initial point 1, which are more proximately located on either side of the stable manifold than the two initial points. These two points approximate a point on the stable manifold with arbitrary precision by iterating this process. Furthermore, by mapping the approximated point, we can obtain the orbit on the stable manifold [6]. We use the unstable quasi-periodic orbit estimated numerically by this bisection method as the external force \({y}_n\).
To understand the structure of the external force control, we assume that the external force \({y}_n\) is derived from a system identical to the control-free system:
Note that (8.6) holds for the orbit \({y}_n\), although it is unstable. We introduce the following transformation [4, 12]:
The control system represented by (8.5) and (8.6) is rewritten as follows:
If the stabilization is achieved, \({U}_n={y}_n\) and \({V}_n=0\).
This transformation has been discussed from the viewpoint of synchronization in dynamical systems [4, 12]. In synchronization theory, the manifold \({V}_n=0\) corresponds to a synchronization hyperplane on which the two systems (8.5) and (8.6) synchronize. If the origin of \({V}_n\) is stable, i.e., the transverse direction of the synchronization hyperplane is stable, the synchronization between the two systems is stable. Although the driving orbit is assumed to be an attractor in synchronization theory, this discussion holds even if it is an unstable orbit.
To evaluate the stability of the external force control, we calculate the Lyapunov exponents of the subsystem (8.7). Since we evaluate the stability on \({V}_n=0\), we linearize (8.7) at the origin of \({V}_n\):
where \({F}'\) is the Jacobian matrix of \({F}\). The largest Lyapunov exponent \(\lambda _1\) of (8.8) is defined by:
for almost any vector \({v}\) [3]. If the largest Lyapunov exponent is negative, the origin of \({V}_n\) is stable and hence the external force control stabilizes the unstable quasi-periodic orbit. These Lyapunov exponents are called conditional Lyapunov exponents because they are calculated for the subsystem driven by the external force [12].

Results of the external feedback control for the coupled map lattice (8.4). We show the average feedback input (top) and the largest Lyapunov exponent (bottom) as a function of the feedback coefficient \(k\). The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)
In Fig. 8.3, we show the results of the external feedback control for the coupled map lattice (8.4). We assume that the feedback input is given to only the state \(x_n\):
where \(k\) is the feedback coefficient. The average feedback input is defined by the average of the input strength \(||{u}_n||\). If the average feedback input is sufficiently small, the stabilization is achieved. In Fig. 8.3, the unstable quasi-periodic orbit is stabilized when the largest Lyapunov exponent is negative.
5 Delayed Feedback Control
The delayed feedback control was also proposed by Pyragas to stabilize unstable periodic orbits [13]. The feedback input \({u}_n\) is defined by the difference between the \(d\)-past state and the current state:
where \(d\) is equal to the period of the unstable periodic orbit. The control system is the same as (8.5). Similarly to the external force control, if the stabilization is achieved, the feedback input vanishes. However, whereas the external force control requires the target orbit itself, the delayed feedback control does not require any exact information of the unstable periodic orbit except its period.
Unfortunately, there is no delay \(d\) such that the feedback input vanishes in the unstable quasi-periodic orbit because of its aperiodicity. However, since the quasi-periodic orbit is almost periodic, we can choose a delay \(d\) in which the feedback input is always small. The delayed feedback control may be applicable to the unstable quasi-periodic orbit by using such a delay in the same way as the periodic case [5].

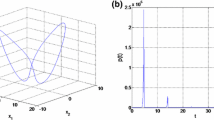
Average distance between \(d\)-past state and current state for the coupled map lattice (8.4). When \(d\le 200\), the delays giving the five smallest distances are 59, 118, 175, 177, and 116 (indicated by circles). The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)
Using the unstable quasi-periodic orbit \({y}_n\), we observe the average of the distance \(||{y}_{n-d}-{y}_n||\) between the \(d\)-past state and the current state. In Fig. 8.4, we show the average distance for the coupled map lattice (8.4). When \(d\le 200\), the delay that gives the smallest distance is \(d=59\), which corresponds to a denominator of a convergent explained in Sect. 8.2. In this sense, we can also choose such a delay by using only the rotation number that generates convergents. We use the delays giving the five smallest distances as the candidates for the feedback delay (circles in Fig. 8.4).

Unstable quasi-periodic orbit (solid circle) and orbit of the delayed feedback control (dashed circle) for the coupled map lattice (8.4). The orbits are projected onto the \(x\)–\(y\) plane. A partial area of the orbits is enlarged to indicate the difference between them. The delay is \(d=59\) and the feedback coefficient is \(k=-0.4\). The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)
In Fig. 8.5, we compare the unstable quasi-periodic orbit to an orbit of the delayed feedback control with the delay \(d=59\). The matrix of the feedback coefficients \(K\) is the same as (8.9). In this case, the stabilization is achieved in the sense that the orbit of the delayed feedback control lies in the neighborhood of the unstable quasi-periodic orbit. However, since the feedback input does not vanish, the difference between the two orbits does not disappear.

Average feedback input of the delayed feedback control for the coupled map lattice (8.4). We use the delays \(d=59,175,\) and 177. The profiles of \(d=175\) and 177 almost overlap with each other. The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)
In Fig. 8.6, we show the average feedback input for \(d=59,175,\) and 177. The other candidates \(d=118\) and 116 are even numbers and the system has stable period-2 points. Since the feedback input vanishes for the period-2 points in these cases, we exclude them. Whereas the average feedback input of \(d=59\) is sufficiently small, the stabilization is not achieved for \(d=175\) and 177.
From the viewpoint of the stabilization of the unstable quasi-periodic orbit, a smaller feedback input is required. We here attempt to realize a small feedback input by using multiple feedback delays. As mentioned in Sect. 8.2, the quasi-periodic orbit is topologically conjugate to the irrational rotation. We consider a delayed phase \(\theta _{n-d}\) in the phase domain. Using the irrational rotation, we can represent the current phase by the delayed phase:
where \(\omega \) is the rotation number. Let \(\langle d\omega \rangle \) be the fractional part of \(d\omega \). Intuitively, the phase difference between \(\theta _n\) and \(\theta _{n-d}\) is defined by \(\langle d\omega \rangle \) from (8.10). However, we require that the phase difference represents the lead and lag of the delayed phase for the current phase. Therefore, we define the phase difference by:
We consider two delays, \(d_1\) and \(d_2\), and their phase differences from the current phase:
From the definition of the phase difference (8.11), \(D_1\) and \(D_2\) are constant and independent of time \(n\). If both delays give small feedback inputs, \(D_1\) and \(D_2\) are also small.

Linear interpolation of current state. Although the homeomorphism \({\psi }\) is a vector function, we show only a component in it. The phase domain is enlarged at the current phase \(\theta _n\). The interpolated state is closer to the current state than either of the delayed states
The state of the quasi-periodic orbit is represented by the phase via the homeomorphism \({\psi }\). Thus, we represent the current state \({y}_n\) by using a linear interpolation of the delayed phases:
Equation (8.12) can be rewritten by using the phase differences \(D_1\) and \(D_2\) (Fig. 8.7):
where \({y}_{n-d_1}={\psi }(\theta _{n-d_1})\) and \({y}_{n-d_2}={\psi }(\theta _{n-d_2})\). As shown in Fig. 8.7, the interpolated state is closer to the current state \({y}_n\) than either of the delayed states \({y}_{n-d_1}\) and \({y}_{n-d_2}\) if \(D_1\) and \(D_2\) are sufficiently small. Therefore, by using two delays, we can obtain a smaller feedback input than that of a single delay.
Since \(D_1\) and \(D_2\) are constant, we introduce a constant parameter \(\tau \):
Using (8.13), we construct the feedback input:
Note that we require no information of the homeomorphism \({\psi }\) in the feedback input. The parameter \(\tau \) can be determined if the rotation number \(\omega \) is given.
In the unstable quasi-periodic orbit of Fig. 8.5, the rotation number is estimated to be \(\omega \approx 2622/5335=0.491\ldots \). Using (8.11), we calculate the phase differences of the delayed states from the current state (Table 8.1). To apply the linear interpolation method to the delayed states, it is necessary that the phase differences of the two delays have different signs. Therefore, we use pairs of the delays \((d_1,d_2)=(59,175)\), (59, 116), (118, 175), (175, 177), and (177, 116). Although the above condition holds for the pair \((d_1,d_2)=(118,116)\), we exclude this pair because the feedback input vanishes for the stable period-2 points. The parameter \(\tau \) is calculated for each pair by using (8.14).

Average feedback input of the delayed feedback control with two delays for the coupled map lattice (8.4). The pairs of numbers show the delays \((d_1,d_2)\). For comparison, we show the profile of the single delay \(d=59\) (dashed curve). The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)
In Fig. 8.8, we show the results of the delayed feedback control with the two delays. Since the feedback input is sufficiently small except that for the case of \((d_1,d_2)=(175,177)\), the stabilization is achieved. In the delays except (175, 177) and (177, 116), we obtain a smaller feedback input than that of the single delay.
6 Pole Assignment Method
As mentioned in Sect. 8.3, in the coupled map lattice, if the absolute value of the complex eigenvalue \(|\mu _{2,3}|\) at the fixed point is greater than one, the quasi-periodic orbit occurs. At the same time, if the absolute value of the real eigenvalue \(|\mu _1|\) is greater than one, the period-2 points are stable and the quasi-periodic orbit is unstable. Therefore, if we can stabilize only the real eigenvalue \(\mu _1\), a stable quasi-periodic orbit is realized. This type of control method is known as the pole assignment method and is widely used in control theory [15].
The eigenvalues of the Jacobian matrix \(J^*\) at the fixed point are given by solutions of \(s\) in the following equation:
where \(I\) is the identity matrix, \(\det (\cdot )\) implies the determinant of a matrix, and the left side of the equation corresponds to the characteristic polynomial of \(J^*\). Thus, if \(\mu _1,\mu _2,\ldots ,\mu _M\) are the eigenvalues of \(J^*\), the characteristic polynomial is given by:
Since a quasi-periodic orbit is assumed to exist, there is at least a conjugate pair of complex eigenvalues whose absolute values are greater than one. We here assume that only \(\mu _1\) is an unstable real eigenvalue (\(|\mu _1|>1\)). The aim of the control is to replace \(\mu _1\) with a stable real eigenvalue \(\hat{\mu }\) where \(|\hat{\mu }|<1\). If such a fixed point is realized, its characteristic polynomial is expressed by:
The feedback input is defined by the difference between the fixed point and the current state:
where \({x}^*\) is the fixed point. The control system is the same as (8.5). Then, the characteristic polynomial of the control system is given by:
If we can design the feedback coefficients \(K\) such that \(r_K(s)=q(s)\), the fixed point of the control system (equivalent to \({x}^*\)) has the objective eigenvalues. It is necessary that all coefficients of \(r_K(s)\) and \(q(s)\) are equivalent. Since we do not change the eigenvalues except \(\mu _1\), the quasi-periodic orbit can be stabilized.
Strictly speaking, this control method does not imply the stabilization of the unstable quasi-periodic orbit itself. Since \({x}^*\) is a constant and \({x}_n\) is a quasi-periodic orbit, the feedback input is large and hence the controlled quasi-periodic orbit is obviously distinct from the unstable quasi-periodic orbit. However, since the control can be carried out by using only the information of the fixed point, the design of the control system is markedly simple in comparison with the previous control methods.
In the coupled map lattice, we consider a restricted matrix of feedback coefficients:
We find the feedback coefficient \(k\) such that \(r_K(s)=q(s)\) holds. For example, the coefficients of \(s^2\) in \(r_K(s)\) and \(q(s)\) are respectively given by:
Since these coefficients are equivalent to each other, we obtain the feedback coefficient \(k\):
This relationship holds for the other coefficients of the characteristic polynomials. Although this is a restricted case, the necessary and sufficient conditions for the existence of \(K\) and the efficient design methods in general cases have been discussed in control theory [15].

Unstable quasi-periodic orbit (solid circle) and orbit of the pole assignment method (dashed circle) for the coupled map lattice (8.4). The orbits are projected onto the \(x\)–\(y\) plane. The controlled eigenvalue is assigned to \(\hat{\mu }=-0.9\) and the feedback coefficient is calculated to be \(k=-0.0465\). The parameters are fixed at \((\alpha ,\beta ,\delta )=(0.79,0.02,0.06)\)

Bifurcation diagrams of control-free system (top) and control system by the pole assignment method (bottom). We use \(\alpha \) as the bifurcation parameter. Boxes show orbits on the \(x\)–\(y\) plane for corresponding \(\alpha \) shown by vertical dashed lines. The controlled eigenvalue is \(\hat{\mu }=-0.9\). The other parameters are fixed at \((\beta ,\delta )=(0.02,0.06)\)
In Fig. 8.9, we show an orbit of the pole assignment method. Although a difference from the unstable quasi-periodic orbit is noticeable, a stable quasi-periodic orbit can be observed by using the pole assignment method. Since the feedback coefficient is determined directly from the system parameters, the control method can be applied to a variety of parameter values more easily than the previous methods. In Fig. 8.10, we compare the bifurcation diagram of the control system to that of the control-free system. In the control-free system, the period-doubling bifurcation to chaotic orbits is observed. In the control system, a quasi-periodic orbit on an invariant closed curve, which is the target orbit, can be observed for a wide range of parameter values. However, besides the invariant closed curve, we observe a period-2 quasi-periodic orbit (double closed curves) and a chaotic orbit. Since this control method does not stabilize the quasi-periodic orbit directly, nor does it prevent the orbit from changing its stability, the orbit stabilization is not always guaranteed. In general, this control method is applicable to only parameter values in neighborhood of the Neimark-Sacker bifurcation in which the unstable quasi-periodic orbit does not disappear.
7 Conclusions
We have applied three control methods, the external force control, the delayed feedback control, and the pole assignment method, to stabilize an unstable quasi-periodic orbit. From the viewpoint of stabilization control, the reproducibility of the unstable quasi-periodic orbit is an important factor. In the delayed feedback control, however, there is an inevitable difference between the controlled and unstable quasi-periodic orbits because a quasi-periodic orbit is almost periodic and there is a delay mismatch between the delayed state and the current state. In the pole assignment method, since the control is applied to a fixed point, the stabilization of the unstable quasi-periodic orbit is indirect and an intrinsically distinct quasi-periodic orbit is stabilized.
On the other hand, prior knowledge required to stabilize the unstable quasi-periodic orbit is also an important factor. The external force control is the most direct method for the stabilization. However, this method requires the unstable quasi-periodic orbit itself as the external force constructed in advance. In the delayed feedback control, although calculation of the rotation number from the unstable quasi-periodic orbit is required, suitable delays may be found by applying the delayed feedback control exhaustively to many delays. On the other hand, since the pole assignment method involves the control to a fixed point, we can apply advanced control theory in which the control is feasible even if there is no adequate knowledge of the system. In Table 8.2, we summarize the three control methods from the viewpoint of the reproducibility of the unstable quasi-periodic orbit and the prior knowledge to control it. Since these factors have a trade-off relationship, it is necessary to choose a method by considering the required reproducibility.
References
Bruin, H.: Numerical determination of the continued fraction expansion of the rotation number. Physica D: Nonlinear Phenomena 59(1–3), 158–168 (1992). http://dx.doi.org/10.1016/0167-2789(92)90211-5
Ciocci, M.C., Litvak-Hinenzon, A., Broer, H.: Survey on dissipative KAM theory including quasi-periodic bifurcation theory based on lectures by Henk Broer. In: Montaldi, J., Ratiu, T. (eds.) Peyresq Lectures in Geometric Mechanics and Symmetry. Cambridge University Press, Cambridge (2005)
Eckmann, J.P., Ruelle, D.: Ergodic theory of chaos and strange attractors. Rev. Mod. Phys. 57, 617–656 (1985). doi:10.1103/RevModPhys.57.617
Fujisaka, H., Yamada, T.: Stability theory of synchronized motion in coupled-oscillator systems. Prog. Theor. Phys. 69(1), 32–47 (1983). doi:10.1143/PTP.69.32
Ichinose, N., Komuro, M.: Delayed feedback control and phase reduction of unstable quasi-periodic orbits. Chaos: Interdisc. J. Nonlinear Sci. 24, 033137 (2014). http://dx.doi.org/10.1063/1.4896219
Kamiyama, K., Komuro, M., Endo, T.: Algorithms for obtaining a saddle torus between two attractors. I. J. Bifurcat. Chaos 23(9), 1330032 (2013). http://dx.doi.org/10.1142/S0218127413300322
Kaneko, K.: Overview of coupled map lattices. Chaos: Interdisc. J. Nonlinear Sci. 2(3), 279–282 (1992). http://dx.doi.org/10.1063/1.165869
Khinchin, A., Eagle, H.: Continued Fractions. Dover Books on Mathematics. Dover Publications, New York (1997)
MacKay, R.: A simple proof of Denjoy’s theorem. Math. Proc. Cambridge Philos. Soc. 103(2), 299–303 (1988)
Ott, E., Grebogi, C., Yorke, J.A.: Controlling Chaos. Phys. Rev. Lett. 64, 1196–1199 (1990). doi:10.1103/PhysRevLett.64.1196
Pavani, R.: The numerical approximation of the rotation number of planar maps. Comput. Math. Appl. 33(5), 103–110 (1997). http://dx.doi.org/10.1016/S0898-1221(97)00023-0
Pecora, L.M., Carroll, T.L., Johnson, G.A., Mar, D.J., Heagy, J.F.: Fundamentals of synchronization in chaotic systems, concepts, and applications. Chaos: Interdisc. J. Nonlinear Sci. 7(4), 520–543 (1997). http://dx.doi.org/10.1063/1.166278
Pyragas, K.: Continuous control of chaos by self-controlling feedback. Phys. Lett. A 170(6), 421–428 (1992). http://dx.doi.org/10.1016/0375-9601(92)90745-8
Veldhuizen, M.V.: On the numerical approximation of the rotation number. J. Comput. Appl. Math. 21(2), 203–212 (1988). http://dx.doi.org/10.1016/0377-0427(88)90268-3
Wonham, W.: On pole assignment in multi-input controllable linear systems. IEEE Trans. Autom. Control 12(6), 660–665 (1967). doi:10.1109/TAC.1967.1098739
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer Japan
About this chapter
Cite this chapter
Ichinose, N., Komuro, M. (2015). Stabilization Control of Quasi-periodic Orbits. In: Aihara, K., Imura, Ji., Ueta, T. (eds) Analysis and Control of Complex Dynamical Systems. Mathematics for Industry, vol 7. Springer, Tokyo. https://doi.org/10.1007/978-4-431-55013-6_8
Download citation
DOI: https://doi.org/10.1007/978-4-431-55013-6_8
Published:
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-55012-9
Online ISBN: 978-4-431-55013-6
eBook Packages: EngineeringEngineering (R0)