
Abstract
This work presents a method to estimate and correct undesirable effects caused by troposphere propagation and non-perfect ground station synchronization, in the context of target tracking with a Wide Area Multilateration (WAM) system. Correlation of opportunity traffic emissions is used to overcome the difficulty of installing reference beacons simultaneously visible to all the base stations. The architecture of this method is based on the possibility of decoupling the target position determination problem and the systematic error estimation problem. On one hand, given the non-linearity of the signal measurement (Time Difference of Arrival) with respect to the target state vector, the target position is determined by using an Unscented Kalman Filter (UKF). On the other hand, an Extended Kalman Filter (EKF) is used to estimate the systematic error in time. The relationship between both filters is established at their respective update stages. Experiments using deliberately adverse scenarios have been performed to test the reliability of this method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Clock synchronization
- Opportunity traffic
- Target tracking
- Troposphere propagation
- Unscented Kalman Filter
- Wide Area Multilateration
1 Introduction
In order to further optimize the use of airspace [1, 2], stricter aircraft positioning requirements can be expected in the near future.
The trend in Air Traffic Management (ATM) is to rely on ADS-B as the main source of aircraft positioning. It is therefore necessary to have an independentcooperative surveillance system. The intention is to gradually migrate from Secondary Surveillance Radar (SSR) towards Wide Area Multilateration (WAM), to enhance surveillance integrity [3] for en-route applications.
Given the fast deployment of ADS-B, a promising solution is to reuse its ground stations as WAM base stations. Each base station will send the measured Time of Arrival (TOA) together with the ADS-B information to the Air Traffic Control (ATC) center. Multilateration is performed by processing the TOAs [3].
In a recent paper [4], authors have characterized two main issues affecting aircraft position estimation based on Time Difference of Arrival (TDOA): synchronization among ground stations and propagation errors. They have demonstrated that using opportunity traffic, accurate horizontal position estimates of aerostatic targets can be obtained.
This paper goes further in the use of opportunity traffic, presenting an aircraft tracking method that corrects the effect of systematic errors.
This method consists of two interdependent Kalman filters: one for the aircraft state vector estimate and the second one for the estimation of the parameters of the systematic error. This way, the effect of the systematic error is fed as a correction in order to provide a more accurate estimate of the aircraft position.
The paper is structured as follows: Sect. 2 states the problem of position determination with WAM, characterizing the effect of systematic errors. Section 3 presents the architecture of the system and its implementation. Section 4 analyzes the performance gain obtained with the use of the presented method.
2 Characterizations of Systematic Errors in WAM Systems
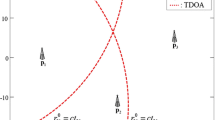
In WAM, the aircraft position is determined by means of the Time Difference of arrival (TDOA) of the signal at the different base stations. A method based on hyperbolic location as described in [5] can be used to obtain an initial solution.
Each base station measures the TOA of the same signal travelling from the target aircraft, as the time of reception (defined by the ground station clock).
The accuracy of the position estimate is therefore determined by the errors in the TOA estimates. From a data processing perspective, these errors can be grouped into three main categories [3]: white noise, propagation effects and synchronization issue among ground stations.
2.1 Impact on the TOA Measurement
The TOA of a signal travelling from aircraft j located at (x j , y j , z j ) to the base station i located at (x i , y i , z i ) can be represented by (1):
and can be rewritten as:
where R ij stands for the slant range separating beacon and aircraft, ΔP i j represents the effect of atmospheric propagation, T e represents the uncertainty affecting the signal emission time, ΔT i is the synchronism error, and n i the white noise random error. In order to eliminate the uncertainty in the signal emission time, the aircraft position will be assessed based on Time Difference of Arrival (TDOA). This means that all available TOAs for a single emission are referenced to the TOA measured by one of the base stations. Thus, the TOA equation system is now replaced by a TDOA equation-system, with one less unknown, as well as one less equation, as follows:
where the reference base station is the mth station.
For the following sections, it is interesting to bring up the concept of pseudorange, noted ρ ij , expressed as the product of the TOA multiplied by the speed of light in vacuum.
The effect of white noise is not critical for the typical S/N values in WAM. Propagation effects will be analyzed and modeled within this section. This is required in order to ensure that the accuracy does not suffer from degradation, especially in scenarios with poor Dilution of Precision. Finally, synchronism errors are considered to be approximately constant during an estimation interval, i.e. clock drift among beacons is out of scope.
2.2 Slant-Range Dependency of Propagation Effect
Let us characterize the propagation effect. The vertical gradient of the atmospheric refractive index “bends” the signal propagation trajectory and changes the velocity of light, thus delaying its arrival to the base station. Figure 1 represents this propagation error with respect to the slant range for aircraft flying at altitudes between 3,000 and 14,000 m AMSL, using path-integration with the ISA model. The base station is considered to be at sea level. Note that the obtained values are only applicable below the red dashed curve, representing the radio-wave Earth horizon.

Systematic error (range bias) due to radio wave propagation for a standard atmosphere
Two relevant characteristics can be observed concerning this propagation error. First, for a given aircraft altitude, a second-degree polynomial seems to be a good fit for modeling the range bias with respect to the slant-range. This is:
Second, although second-degree polynomials seem to be equally applicable to characterize the range bias for all aircraft altitudes, different coefficients are deemed necessary. This altitude dependency limits the applicability of the second-degree polynomial to a narrow layer (1–2 km) in height. This observation suggests an altitude dependency of the range bias, which will be analyzed in Sect. 2.3.
2.3 True Altitude Dependency
Section 2.2 has revealed the possibility of modeling the range bias through a family of second-degree polynomials using the slant-range as the independent variable, one per altitude layer. However, a relationship between these polynomials needs to be established in order to provide a general expression of the range bias.
Figure 2 shows the ratio between the range bias obtained when an aircraft is flying at a given altitude, compared to when flying at 14 km AMSL but at the same slant range from the beacon. Again, note that the obtained values are only applicable below the red dashed curve, representing the radio-wave Earth horizon.

Ratio between range biases for aircraft flying at a given altitude compared to at 14 km AMSL but equal slant-range

Ratio between range biases for aircraft flying at a given altitude compared to when flying at 14 km AMSL but equal slant-range
Observations made in Sect. 2.2 and this section lead to the following proposal to approximate the range bias as a combined function of the aircraft altitude and the slant-range between the aircraft and the beacon. This is obtained as the product of (4) and (5).
The three-parameter model of the range bias is therefore as follows:
It is assumed that variations in atmospheric propagation can be modeled with this expression. However, different values will apply with respect to the ones used in the case of the standard atmosphere.
This way, combining (3) and (6), a generic equation within the system is:
We are now in a position to establish a system of TDOA equations in order to determine the aircraft position. It is important to mention that the number of unknowns has increased due to the characterization of propagation effects and relative synchronization errors. Therefore, the solution of the system shall not only contain the aircraft coordinates, but also the parameters used to model the propagation effect and the clock synchronization errors.
In order to avoid an indeterminate system of non-linear equations, a set of new independent equations must be obtained with the use of opportunity traffic, as presented in [4].
3 Target Tracking with Correction of Systematic Errors
The simplest approach for estimating the systematic errors is to assume that the parameters characterizing them are constant in time. This would mean that their estimation could be performed offline. However, the systematic errors under study change in time: propagation effects due to the constant changes in the atmosphere and clock synchronization due to the existing drift among the base stations’ clocks. It is therefore required to perform a dynamic estimation of these errors, in parallel with the maintenance of target tracks.
This way, in theory, the filter equations of the systematic errors are coupled to the track maintenance equations for each target. However, an approach to decouple filter equations for systematic error estimation from the track maintenance filter equations is presented in [7]. This paper presents how this philosophy can be applied to a WAM target tracking system.
3.1 Design Architecture
In order to estimate the target position based on TDOA measurements, a system capable of correcting the systematic errors is required, as per in [7]. This way, it is not only needed to estimate the target state vector, but to estimate the effect of systematic errors (as characterized in Sect. 2) as well, in order to correct it. Figure 3 shows the design architecture aimed at performing this task. It consists of two Kalman filters that are interdependent in the update phase.

Joint target tracking and systematic error correction for WAM
An UKF [8] is used for target tracking, given the non-linearity of TDOA measurements with respect to the target position. The prediction step of the UKF uses the previous combination of target state vector (position, velocity and acceleration) and its associated covariance matrix in conjunction with a Singer acceleration model [6]. The update step combines this prediction with the obtained TDOA measurements and the systematic error estimate.
On the other hand, the tracking of the systematic error model is performed via EKF. The estimation phase of EKF uses the previous combination of state vector and its associated covariance matrix. In this case, the state vector contains the clock synchronization errors and the three parameters of the propagation error model described in Sect. 2 (α 1, α 2 and α 3).
It should be noted that the initialization phase of this system requires a set of observations based on TDOA measurement and hyperbolic location [5]. A second degree polynomial fit of the position estimate is performed for each target, in order to feed the tracking system with an initial set of state vectors.
3.2 Implementation
In this paper, all positions are defined as relative ranges to a fixed point in the centre of the WAM constellation. The target state vector X is therefore composed by the combination of range, velocity and acceleration (in all three axes) of each aircraft (M in total). The target covariance matrix P X will initially be a block diagonal matrix. These are respectively:
where:
Likewise, the systematic error state vector E is composed by the three parameters used in the range bias model (Sect. 2) and the N − 1 clock synchronization errors, where N is the number of WAM stations. Thus, the systematic error state vector and its associated covariance matrix P E are defined as follow:
3.2.1 Prediction Step (Target)
The prediction step for the target is performed in three stages (Fig. 4): the first stage consists of generating the augmented state vector. The second stage performs the prediction of the state vector associated to each sigma point, based on the Singer acceleration model. The last stage consists of generating the state vector and the covariance matrix associated to the prediction step.

Block diagram of the target prediction step
In this paper, since the state vector of each aircraft is composed by nine elements, the amount of sigma points is 18M + 1.
These sigma points χ are obtained as follow:
where:
The tuning parameter α determines the spread of the sigma points around the mean value and is usually set to a small positive value (10−3 in this paper). κ is a secondary scaling parameter which is usually set to 0.
The second stage consists of obtaining the predicted target vector associated to each sigma point \( {\overline{\chi}}^q\left(\left.k\right|k-1\right) \), based on the maneuvering model. The experiment presented in this paper uses the Singer acceleration model, thoroughly explained in [6].
The third stage computes the predicted mean and the predicted covariance as follow:
where
and
The tuning parameter β is used to incorporate prior knowledge of the distribution of X. A value of 2 is optimal for Gaussian distributions.
3.2.2 Prediction Step (Systematic Error)
Due to changes in the atmospheric conditions, as well as in the synchronization errors, the systematic errors may certainly vary in time. In this paper, we assume the linear Gaussian system presented in [7] to be an appropriate dynamic error model. This way, the prediction equations are:
The setting of E(0) and P E (0) follows from off-line systematic error evaluations. Based on the typical values of α 1, α 2, as well as the synchronization errors obtained during the experiments performed in [4], the values of E(0) and P E (0) have been chosen as follow:
-
E(0) is set to a null vector
-
P E (0) is such that each diagonal value is two orders of magnitude greater than the square of its associated parameter
It is to be noted that based on the results in Fig. 5, the value of 10−3 has been chosen as typical for α 3. The weight matrix A is used to tune the sensitivity of the prediction step.
At this stage, we have obtained the predictions for target and systematic error.
3.2.3 Update Step (Target)
The update step for the target is performed in two phases. Phase one consists of obtaining the TDOA estimate using the philosophy depicted in Fig. 4. This way, the augmentation process described in (11) is applied to X(k│k − 1), yielding χ q(k│k − 1). The observation model described in (7) is then applied to χ q(k│k − 1), q ranging from 0 to 18M. We will note the result of this process as \( {\overline{\Delta \tau}}^q\left(\left.k\right|k-1\right) \), in order to highlight that the result for each sigma point is a vector of TDOA estimates. Please note that the values associated to this observation model are included in E(k|k − 1). Finally, \( {\overline{\Delta \tau}}^q\left(\left.k\right|k-1\right) \) is averaged as per (14) in order to obtain the vector of TDOA estimates \( \overline{\Delta T}\left(\left.k\right|k-1\right) \).
The second stage consists of updating the target state using the TDOA measurements, as defined in the expression below:
where:
3.2.4 Update Step (Systematic Error)
Finally, the update step of the systematic error is performed following the process described in [9]. Hence, the update equations are:
Vector v is the “row-wise” sum of matrix v m . v m , in its turn, is obtained as follows:
with
where R is the diagonal matrix containing the covariance of the TDOA measurement errors. P S is the sub-matrix composed by the elements of P x (k│k) associated to the target positions.
On the other hand, matrix V is obtained as follows:
4 Assessment of the Proposed Method
4.1 Experiment
In order to assess the technique presented in this paper, Monte Carlo experiments involving a hypothetical WAM scenario with eight aircraft and six base stations have been performed. The performance of the technique is measured through the accuracy and precision of the target position estimates along the experiment run time.
4.2 Assumptions
The following assumptions have been made:
-
All aircraft have constant groundspeed along a specified bearing and a specified height AMSL. Due to the Earth curvature, this does not mean that the velocity vector remains constant.
-
The range bias due to propagation effects has been modeled following the path integration method presented in [9].
-
Clock synchronization errors and white noise have been modeled via zero-mean Gaussian distributions.
4.3 Settings
The aircraft motion settings are compiled in Table 1, whereas the base station coordinates are compiled in Table 2. Each aircraft emits its signal every 4 s. The receiver noise has been modeled through a Gaussian distribution with zero mean and a standard deviation of 3 m. The run time of the experiment is 15 min.
5 Results
5.1 Legend
Figure 6 displays the mean error of the position estimate, whereas Fig. 7 displays the standard deviation. In both figures, the red plots show the minimum, median and maximum values of the respective magnitudes achieved when using the hyperbolic method. On the other hand, the blue plots display the achieved performance using the method presented in this paper.

Mean values of horizontal and vertical positioning error

Standard deviation of horizontal and vertical positioning error
5.2 Discussion
Concerning the accuracy of the position estimates (Fig. 6), the mean value of the error is reduced down to one fourth of the error obtained when using the hyperbolic location alone. The most significant improvements can be seen in the worst case scenario (maximum error curve).
The precision of the position estimates (Fig. 7) can be improved up to one order of magnitude, limiting the standard deviation of both horizontal and vertical positioning errors to 100 m during the entire run.
Figures 8 and 9 display respectively the HDOP and VDOP derived from the constellation defined in Table 2, for aircraft flying at a true altitude of 7 km AMSL. Note that the calculations have been performed assuming hyperbolic location in an error-free environment, following the method described in [10].

HDOP for the constellation used in the experiment (an aircraft altitude of 7 km AMSL is used)

VDOP for the constellation used in the experiment (an aircraft altitude of 7 km AMSL is used)
The algorithm used in this paper ensures that the horizontal precision of the position estimate does not exceed the predictable standard deviation based on the product of GDOP (without systematic error) and sensor error. The tracking filter ensures a vertical precision better than the GDOP-based expectation.
6 Conclusions
The method presented in this paper takes advantage of opportunity traffic to correct the systematic errors affecting WAM performance. Significant gains in both accuracy and precision are obtained for target tracking, especially in scenarios with poor GDOP.
References
EUROCONTROL (2010) Introduction to the mission trajectory, ed. 1.0, May 2010
EUROCONTROL (2009) EUROCONTROL specification for the application of the Flexible Use of Airspace (FUA), ed. 1.1, October 2009
SESAR Consortium (2007) SESAR definition phase – deliverable 3: the ATM target concept, September 2007
Abbud J, De Miguel G, Besada JA (2011) Correction of systematic errors in wide area multilateration. In: Proceedings of the enhanced surveillance of aircraft and vehicles, Capri, September 2011
Chan YT, Ho KC (1994) A simple and efficient estimator for hyperbolic location. IEEE Trans Signal Process 42(8):1905–1915
Li XR, Jilkov VP (2003) Survey of maneuvering target tracking. Part I: Dynamic models. IEEE Trans Aerosp Electron Syst 39(4):1333–1364
Bar-Shalom Y (ed) (1992) Multitarget–multisensor tracking: applications and advances, vol II. Artech House Inc., Norwood
Simon JJ, Uhlmann JK (2004) Unscented filtering and nonlinear estimation. Proc IEEE 92(3)
Barton DK (2005) Radar system analysis and modeling. Artech House Inc., Norwood
Torrieri DJ (1984) Statistical theory of passive location systems. IEEE Trans Aerosp Electron Syst 20(2):183–198
Acknowledgment
This work has been financed by the Spanish Science and Technology Office under projects TEC-2011-28626.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Japan
About this paper
Cite this paper
Abbud, J., De Miguel, G. (2014). Joint Target Tracking and Systematic Error Correction for Wide Area Multilateration. In: Air Traffic Management and Systems. Lecture Notes in Electrical Engineering, vol 290. Springer, Tokyo. https://doi.org/10.1007/978-4-431-54475-3_10
Download citation
DOI: https://doi.org/10.1007/978-4-431-54475-3_10
Published:
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-54474-6
Online ISBN: 978-4-431-54475-3
eBook Packages: EngineeringEngineering (R0)