
Abstract
This study evaluates the effects of taxation policies on promoting fuel-efficient vehicle ownership and use. Ownership is described as choice of vehicle type based on a paired combination logit (PCL) model and use is represented by a copula-based multivariate survival (CMS) model that includes both holding duration and annual distance traveled. To estimate the integrated model, the PCL model is first estimated and then incorporated into the CMS model. Policy effects are evaluated by calculating changes in CO2 emissions under different taxation policies. An empirical analysis was conducted of data from a questionnaire survey in the Chugoku region of Japan in 2006. Through the simulation analysis of vehicle-related taxes, it is found that increasing the fuel tax is the most effective means of reducing CO2 emissions, followed by the auto tax and weight tax collected at vehicle inspections. Moreover, it is further observed that, contrary to our expectation, increasing the acquisition tax actually leads to an increase in CO2 emissions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
8.1 Passenger Car Policies and Existing Studies of Behavior Models
The transport sector accounts for more than 20 % of total global emissions (Nurul Amin 2009). Although reducing emissions from the transport sector requires a reduction in vehicle ownership, this is more difficult than it appears because there is no competitive alternative travel mode that can replace private vehicles and meet people’s higher-order mobility needs. Probably because of the inconvenient service by other travel modes in many countries, including developed countries, vehicle ownership, especially of gasoline-powered vehicles, increases every year. Under the current growing trend, gasoline-powered vehicles are likely to remain the dominant form of mobility in the global market, especially in developing countries in the next 20 or 30 years. Therefore, it seems more realistic for policy makers to encourage people without sufficient support from public transportation systems to own and use more fuel-efficient vehicles instead of simply discouraging vehicle ownership and consequently making policies socially unacceptable.
Generally, policies concerning vehicle ownership and use can be grouped into four categories: enforcing regulations and institutional rules, pricing, technological development, and enlightenment. The success of enforcement is usually determined by the effectiveness of regulations and rules as well as the compliance of consumers. Innovative technological developments such as electric, plug-in hybrid or other low-emission vehicles could ultimately be one of the means of reducing emissions. The success of technological development requires seamless support from the other three categories of policies. Enlightened policy relies heavily on people’s voluntary cooperation, and success requires stakeholders to make enormous and continuous efforts to communicate with people, making cost effectiveness questionable. Compared with the other three policy categories, pricing is expected to play the most critical role in reducing emissions from vehicles, although this method is old-fashioned and usually involves difficult consensus building. Better pricing schemes should be proposed.
From the public policy-making perspective, taxation is the most relevant pricing tool. In most countries, new vehicle taxation systems have been introduced to reduce environmental loads from passenger vehicles. Household vehicle ownership consists of the three stages of “vehicle purchase,” “vehicle use,” and “duration of vehicle ownership” (de Jong 1996). Previous studies have attempted to describe complicated vehicle ownership behavior (Best and Lanzendorf 2005). For example, Bhat and Sen (2006) applied discrete–continuous models to describe choices of vehicle type and the use of vehicles, simultaneously. However, there have been no studies to incorporate the correlation between the stages of vehicle use and holding duration (i.e., duration of vehicle ownership). Recently, a rapid increase in fuel prices has caused an overall decrease in vehicle use and a shift to vehicles with more fuel-efficient engines. There is no doubt that change in the running costs of private vehicles affects choices of vehicle type, vehicle use, and holding duration. To reduce total emissions from passenger vehicles, promoting the ownership of low-emission vehicles, and reducing frequency of vehicle use and trip distance are important. Vehicle ownership behavior is affected by household and individual attributes as well as policy variables such as tax, service levels of transit systems and land use. When changing vehicle-related taxation, policy makers should take note of differences in those taxes collected at different stages. For example, vehicle purchasers in Japan must pay an acquisition tax, a consumption tax and an annual holding tax (i.e., auto tax) in addition to the weight tax at vehicle inspection every 2 years while they own the vehicle. Obviously, vehicle users also need to pay fuel taxes. If the above four types of taxes were paid at different stages, it may be expected that their influence on household vehicle ownership and use behavior would change. For more effective tax policies, vehicle ownership and use behavior should be integrated by explicitly incorporating their interdependence.
On this basis, this study evaluates the effects of taxation policies on the promotion of fuel-efficient vehicle ownership and use by developing an integrated model. The model simultaneously considers vehicle purchase, vehicle use, and duration of vehicle ownership by accommodating the correlations between these three aspects of vehicle use. To develop the integrated model, we first formulate a vehicle type choice model based on a paired combination logit (PCL) model. Then, in terms of the stages of vehicle use and duration of vehicle ownership, we build a further copula-based multivariate survival (CMS) model of annual traveling distance and holding duration, and finally combine the CMS and PCL models. A copula is a function that allows us to combine prespecified (univariate) marginal distributions to obtain a (multivariate) joint distribution with the help of a limited number of dependence parameters in a flexible way and at a low computational cost (Nelsen 2006). Of particular note is that the copula function is flexible to represent the correlated random variables that may follow different marginal distributions.
8.2 The Japanese Automobile Tax System
Taxes on passenger cars include an acquisition tax, an auto tax and a light car tax (collected by local governments), and a weight tax (collected by central government). These taxes are briefly summarized below. In addition, there is a fuel tax.
-
Acquisition Tax
When a car is purchased, an acquisition tax is charged. The tax rate is 5 % for passenger cars, except for light cars, and 3 % for other types.
-
Auto Tax
The auto tax is a kind of property tax charged for the possession of a car. Auto tax for a passenger car with an engine capacity of less than 1,000 cc is 29,500 yen/year. For passenger cars with an engine capacity of less than 3,000 cc, an extra tax of 5,000 yen per 500 cc must be paid. If the displacement is larger than 3,000 cc, the tax rises sharply, and the amount reaches 111,000 yen/year for a car with an engine capacity of more than 6,000 cc.
-
Light Car Tax
This tax is a kind of priority tax that is charged for the possession of a light car (with engine displacement of 550 cc or less). The tax rate is 7,200 yen/year for a light passenger car, and 4,000 yen/year for a light truck. One can see that there is a large gap between the auto tax and the light car tax.
-
Weight Tax
The weight tax is collected to fund the construction of road infrastructure. This tax is included as a source of general revenue for the central government. The tax rate is 6,300 yen/year for each half tonne. It is paid at the time of vehicle inspection (usually every 2 years).
8.3 Model of Vehicle Ownership and Use
8.3.1 Modeling Framework
In this study, we develop an integrated model simultaneously including “vehicle purchase,” “vehicle use,” and “duration of vehicle ownership.” The stage of “vehicle purchase” consists of two choices: (1) number of vehicles, and (2) vehicle type. However, the private vehicle market is already saturated in Japan. Therefore, there has been no significant increase in number of vehicles over recent decades, because households already own a sufficient number of vehicles. Therefore, this study only models vehicle type choice in the vehicle purchase stage and applies a disaggregate choice model to describe choice behavior.
Vehicle use and the duration of vehicle ownership can be decomposed into decisions such as the purpose of vehicle use, destination choice, travel mode choice, and timing. However, no action related to vehicle use and duration of vehicle ownership can be modeled without detailed data, but these models are beyond the scope of this study. This study focuses on annual traveling distance and holding duration, and applies the survival model to analyze these. Although the survival model is not behaviorially-oriented, it can appropriately describe the probability density of these continuous variables, and the model frame can be flexibly designed. The remaining subsections discuss the characteristics of the models at each stage of vehicle ownership and use.
8.3.2 Vehicle Type Choice Modeling
Disaggregate choice models are generally used to describe the choice of vehicle type. Household characteristics and vehicle attributes are used as explanatory variables (Adler et al. 2003; Potoglou and Kanaroglou 2007). Moreover, it is expected that vehicle use preference significantly influences choice of vehicle type. And, the detailed individual characteristics of factors such as vehicle purpose and frequency are not modeled in this study. Therefore, these unobserved factors of vehicle use are considered to be latent characteristics in our model. Therefore, we introduce annual traveling distance in the previous year as a proxy variable for vehicle use preference.
From the perspective of modeling vehicle type choice, it is recognized that the unobserved correlations between the alternatives should be considered, in case ignoring the correlations leads to biased estimates (Brownstone et al. 2000). This study applies the Paired Combination Logit (PCL) model to represent the correlations. The PCL model was proposed by Chu (1989), and Koppelman and Wen (2000) studied the theoretical aspects in terms of the model structure, properties, and estimation. The model allows correlation between any pair of alternatives. Joint partial dependence among the alternatives is added as similarity coefficients \( {\sigma }_{j{j}^{\prime }}\in (0,1)\) where the alternatives j and j' are identical if \( {s}_{j{j}^{\prime }}\) takes a value of 1, while the alternatives j and j' are independent if \( {s}_{j{j}^{\prime }}\) takes a value of 0.
The choice probability is described as follows:
where \( {\sigma }_{j{j}^{\prime }}\) is the similarity coefficient between alternatives j and j', \( {V}_{j}\) is the nonstochastic term of the utility for alternative j, \( P(j{j}^{\prime })\) is the marginal probability of the alternative pair j and j', and \( P(j|(j{j}^{\prime })\) is the conditional probability of choosing alternative j given that the alternative pair jj' has been chosen.
8.3.3 Joint Modeling of Holding Duration and Annual Traveling Distance
Survival analysis has been extensively used to model the probability density function (PDF) of a continuous variable before the event that it concerns. In the area of transportation, there are studies applying it to the analysis of duration of a vehicle holding (Hensher 1985; Gilbert 1992), the duration of activities (Mannering and Hamed 1990), and the length of time between vehicle accidents (Mannering et al. 1994). In this study, vehicle annual traveling distance (d) and vehicle holding duration (t) are examined using survival models.
The annual traveling distance is usually influenced by a number of factors. In this study, we introduce household attributes, main-user attributes, and vehicle attributes as the covariates in our model. These covariates are also used in the model of vehicle holding duration. In addition, the logsum variable estimated in the vehicle type choice models is introduced as a covariate, because it can be an index of the price and quality of vehicles available in the current market. The coefficient of the vehicle type logsum would be negative, because the higher the expected utility of vehicle choice alternatives, the shorter the duration of vehicle holding.
In 2009, a rapid increase in fuel price caused a decrease in vehicle kilometers traveled and an increase of vehicle replacement with smaller ones. There is no doubt that the change in vehicle running cost affects both vehicle use and holding duration. In other words, annual travel distance and holding duration are dependent. This study proposes a Copula-based Multivariate Survival (CMS) model to capture the interdependence between these two factors. In the next section, we first formulate a univariate survival model to analyze annual traveling distance and vehicle holding duration, and we then develop a multivariate survival model with copula functions.
8.3.3.1 A Univariate Survival Model
In a survival model, time \( T\) is considered to be a continuous random variable. It measures the time elapsed before an event occurs. In this study, it is used to represent the duration of ownership of a vehicle and annual traveling distance. Suppose that \( T\) has a continuous PDF \( f(t)\), where t is a sample of T. The distribution function (\( F(t)\)) shows the probability that the failure time is less than or equal to t:
Then the hazard function can be written as a function of the distribution function \( (F(t))\) and the corresponding density function \( (f(t))\) of the random variable t:
Another important construct in hazard-based models is the survival function \( (S(t))\), which gives the probability of duration t before the focal event occurs. This is related to the distribution function as follows:
Because \( f(t)=-dS(t)/dt\), the hazard can also be written as:
If the hazard is known, the survival function can be found through:
Then, the density function of t is expressed by:
As shown in Eqs. (8.2)–(8.7), \( f(t)\), \( S(t)\) and \( h(t)\) are mathematically identical. If the distribution \( f(t)\) is known, then \( S(t)\) and \( h(t)\) can be uniquely derived. A number of PDFs for \( f(t)\) have been proposed and examined in previous studies. This study examines three PDFs for the vehicle holding duration model; these are: (1) Weibull, (2) log-logistic, and (3) log-normal.
In our model, some covariates may change over time. For example, household characteristics could change before a vehicle is replaced. Pendyala et al. (1995) showed that the relationship between vehicle ownership and income is not constant. In such a case, to incorporate the changes of the covariate into the model, time-varying covariates should be introduced. Let the interval “0 to t” be divided into N nonoverlapping intervals, \( {t}_{0}<{t}_{1}<\dots <{t}_{N}\), where \( {t}_{0}=0\) and \( {t}_{N}=t\). The covariates are assumed to be invariant within each interval, but they may vary from one interval to another. The survival function is rewritten as follows:
where \( X(t)\) denotes a time-varying covariate at time t. The time-varying covariates are modeled as a step function, with different values through several intervals between t = 0 and t = t N :
The survival function with the time-varying covariate \( X(t)\) is expressed as follows:
In this study, the vehicle holding duration model is constructed using survey data on household vehicle ownership from 1996 to 2006. The exact holding durations of previous cars purchased and disposed of from 1996 to 2006 were observed. When a vehicle is observed at the start and end of a holding period, there is no problem. However, if the vehicle was bought before the survey, the sample cannot be used because we do not have the characteristics of the household and main user before 1996. Furthermore, if the vehicle is in use during the survey period, the exact holding duration cannot be observed. It is already known that estimating a model without these censored observations leads to self-selection bias (1995). Therefore, in this study, we incorporate left- and right-censored periods to avoid selection bias. The following log-likelihood function for the survival function model incorporates the censoring observation:
where NC, RC, LC, and LRC are the numbers of noncensored, right-censored, left-censored, and left-and-right-censored observations, respectively.
8.3.3.2 Copula-Based Multivariate Survival Models
A bidimensional copula is a function \( {C}_{q}:{[0,1]}^{2}\to [0,1]\) with the following properties:
-
1.
\( {C}_{q}(0,u)={C}_{q}(u,0)=0\) and \( {C}_{q}(1,u)={C}_{q}(u,1)=u\), for all \( u\in [0,1]\), and
-
2.
\( {C}_{q}(·,·)\) is bi-increasing; that is, for all \( {u}^{\prime }>u\) and \( {v}^{\prime }>v\):
Let T and D be two random variables with \( {F}^{T}(t)\), \( {F}^{D}(d)\) as marginal distribution functions, and let \( {C}_{q}\) be a bidimensional copula. Then the function \( {C}_{q}({F}^{T}(t),{F}^{D}(d))\) is a cumulative distribution function. Thus, copula functions are used to redefine joint distributions using the given margins. For any pair of scalar random variables (T, D) with distribution function F, there exists a copula function \( {C}_{q}\) such that:
The copula function \( {C}_{q}\) is unique if the marginal distribution functions \( {F}^{T}(t)\), \( {F}^{D}(d)\) are continuous. Here, \( q\) is a dependence parameter, which simultaneously characterizes the dependence between \( {F}^{T}(t)\) and \( {F}^{D}(d)\).
One can also define copula densities in the same way as one defines probability densities. Let the distribution of (T, D) be continuous. The differentiated form of Sklar’s theorem splits the joint density of T and D, \( f(t,d)\), into the product of marginal densities \( {f}^{T}(t)\) and \( {f}^{D}(d)\), and the copula density, \( {c}_{q}(u,v)\equiv {\partial }^{2}{C}_{q}(u,v)/\partial u\partial v\), becomes:
Because \( {F}^{T}(t)\) and \( {F}^{D}(d)\) have uniform distributions, \( {c}_{q}(u,v)\) is the density of \( ({F}^{T}(t),{F}^{D}(d))\) at \( (u,v)\) and is also the conditional density of \( {F}^{D}(d)\) at point \( v\) given \( {F}^{t}(T)=u\).
To estimate unknown parameters, the following log-likelihood function is adopted:
Copulas themselves can be generated in different ways, including the method of inversion, the geometric method, and the algebraic method. A rich set of copula functions have been generated using these methods. In this paper, we consider one of the simplest forms of these copulas: the Archimedean copulas, which are useful for bivariate data. Archimedean copulas have been widely used because of their mathematical tractability. The Archimedean class is rich, and as a result, it does not seem to be very restrictive. A detailed description of copula models is given by Nelsen (2006). From the Archimedean class, we will consider the Gumbel, Clayton, and Frank copulas, which present several desired properties, and select the best copula based on the goodness-of-fit index.
In this paper, copula-based models are used to capture and explore the dependence relations between vehicle holding duration and annual traveling distance. For a pair (T, D) (T: vehicle holding duration; D: annual traveling distance) with a joint distribution function F, the joint survival function is given by \( S(t,d)=P[T>t,D>d]\). The margins of S are the functions \( S(t,-\infty )\) and \( S(-\infty,d)\), which are the univariate survival functions \( {S}^{T}(t)\) and \( {S}^{D}(d)\), respectively.
Let X and Y be continuous random variables with copula C TD . Let \( a\) and \( b\) both be strictly decreasing on Ran T and Ran D, respectively. Then:
Using Eq. (8.15) and the copula function (8.12), the joint survival function \( S(t,d)\) is given as follows:
where function \( {\widehat{C}}_{q}\) is the survival copula of T and D.
8.4 Revealed Preference Survey
Data used in this study were obtained from a revealed preference survey of household vehicle ownership and use behavior. The data were collected in October 2006 from households living in the Chugoku area of Japan. All the householders were asked to answer questions about their households and individual attributes, and the attributes of passenger vehicles owned in the past 11 years (i.e., from 1996 to 2006). As a result, questionnaires from 500 households with vehicles were collected. The sample used in this study includes 757 vehicles, among which 372 (49.1 % of the sample) were replaced or disposed of between 1996 and 2006, and 101 (13.3 % of the sample) were purchased before 1996 (left-censored data). The remaining 284 vehicles (37.5 % of the sample) were purchased after 1996 but were still used by households at the time of survey (right-censored data).
In Japan, vehicle type is usually classified based on engine displacement. This classification is well known to vehicle users. Because tax systems vary according to engine displacement, vehicle users in Japan are very sensitive to this when purchasing vehicles. Therefore, this study defines the alternatives to passenger vehicles based on engine displacement, considering that this category is directly related to evaluation of fuel consumption, emissions and effects of vehicle taxes. Exploring the choice behavior of passenger vehicle types is important for both marketers and public policy makers, especially considering that an increasing number of people are expressing concern about environmental issues. For the purposes of estimating the choice models presented in this paper, the following three choice alternatives are adopted.
-
Small vehicles: passenger vehicles with engine displacement smaller than or equal to 660 cc
-
Medium-sized vehicles: passenger vehicles with engine displacement greater than 660 cc and smaller than or equal to 2,000 cc
-
Large vehicles: passenger vehicles with engine displacement greater than 2,000 cc
In the sample, medium-sized vehicles comprise the majority of vehicle types (54.7 %), and the shares of small and large vehicles are 27.3 % and 18.0 %, respectively.
Figure 8.1 shows the annual vehicle traveling distance, calculated from vehicle holding duration and total traveling distance. The average distance traveled is 10,015 km/year. Figure 8.2 shows the vehicle holding duration for those replaced or disposed of from 1996 to 2006. The average vehicle holding duration was 4.48 years.

Distribution of annual vehicle traveling distance

Distribution of vehicle holding duration
8.5 Analysis of Model Estimation Results
8.5.1 Vehicle Ownership: Vehicle Type Choice
Estimation results for the vehicle type choice model are shown in Table 8.1. The adjusted McFadden’s Rho-squared is 0.236, suggesting that the model is an acceptable representation of household vehicle type choice in this study. Although fuel efficiency of the vehicle and taxes are used as explanatory variables in previous studies, this study does not consider them because the alternatives are defined according to engine displacement, which is strongly related to these variables.
Concerning the influence of household attributes, the coefficient of the average age of husband and wife has a positive sign and is statistically significant. This implies that older people prefer to own larger vehicles. For vehicle attributes, the composite variable “price/household income” and number of passenger seats have negative values and are statistically significant. These mean that inexpensive and smaller vehicles are preferred. The coefficient of annual traveling distance in the previous year has a positive sign and is statistically significant, which means that households traveling large distances prefer to have medium-sized or large vehicles.
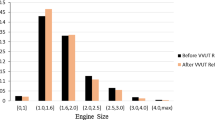
For dependence among the alternatives, the similarity coefficient between medium-sized and large vehicles is statistically significant, but the others are not. These results indicate an unobserved correlation between medium-sized and large vehicles, and the PCL model is validated. One of the supposed reasons for the correlation between medium-sized and large vehicles is the difference in tax systems. The taxes on passenger vehicles include an acquisition tax, an auto tax, a light car tax, a weight tax, and a fuel tax. These tax systems are divided into two main classes: (1) tax systems for light vehicles, and (2) tax systems for medium-sized and large vehicles. As can be seen in Sect. 8.2, there is a large gap between the tax systems for medium-sized and large vehicles and that for light vehicles.
8.5.2 Vehicle Use: Annual Traveling Distance and Holding Duration
8.5.2.1 Selection of Baseline Hazard
In this section, we compare several candidates for underlying baseline hazard to discover which best predicts annual traveling distance and holding duration based on the Bayesian Information Criterion (BIC) value. We examined three distributions: (1) Weibull, (2) log-normal, and (3) log-logistic distributions with respect to annual traveling distance and holding duration. The candidate models are estimated for each dependent variable. Table 8.2 shows the baseline hazards for annual traveling distance and holding duration. It is clear that the log-logistic distribution provides the best goodness of fit. The hazard model of holding duration with a Weibull distribution has the highest model accuracy. Therefore, this study adopts the log-logistic distribution of baseline hazard of annual traveling distance, and the Weibull distribution for that of holding duration.
8.5.2.2 Selection of Copula Function
Having selected the baseline hazards, we examined which type of copula was the most suitable for capturing the interdependence between annual traveling distance and vehicle holding duration. Here, four copulas were considered candidates: (1) normal, (2) Gumbel, (3) Clayton, and (4) Frank. Table 8.3 reports the BIC values for the CMS models. Comparison of the BIC values indicates that the CMS model with a Clayton copula provides the best goodness of fit. Moreover, fit of the CMS model with a Clayton copula is better than that of the conventional model assuming no interdependence between annual traveling distance and vehicle holding duration. Thus, the proposed CMS model outperforms the conventional model.
8.5.2.3 Analysis of Model Estimation Results
The estimation results of the CMS model with the Clayton copula, which has the highest goodness-of-fit index, are shown in Table 8.4. The coefficient of copula is statistically significant and has a negative sign, which indicates negative interdependence between annual traveling distance and holding duration. Therefore, the holding duration decreases as the annual traveling distance increases.
The estimated coefficients related to annual traveling distance, and all the coefficient estimates for household attributes, main-user attributes, and vehicle attributes have the expected signs. The coefficients of distances to the nearest railway station and supermarket have positive signs and are significant. These results seem reasonable because households with low accessibility to stations and supermarkets tend to depend on vehicle mobility. Moreover, vehicles mainly used for commuting tend to travel greater distances annually because the coefficient of commuting distance has a positive sign and is significant. The coefficient of the wife dummy is negative, indicating that wives drive shorter distances than other respondents. The signs of the coefficients for medium-sized and large vehicles indicate that they drive longer distances than do small vehicles. The coefficient of running cost, which is a policy variable, has a negative sign and is significant. This result indicates that annual vehicle kilometers traveled decreases as fuel tax and gasoline price increase.
Observing the estimation results related to holding duration, we find that all coefficient estimates have the expected signs. The coefficient of number of household vehicles has a positive sign and is statistically significant, implying that a household with multiple vehicles holds each vehicle for a longer period. The negative coefficient of income suggests that households with high incomes tend to replace their vehicles much earlier than others. With regard to the coefficients of main-user attributes, that of the commuting vehicle dummy indicates that vehicles used for commuting are held for shorter periods than other vehicles. The coefficient of main-user age has a significant and positive value. Older main users tend to hold their vehicles for longer periods. The coefficient of the logsum variable, which is calculated according to the vehicle type choice model, has a significantly negative sign. The logsum variable is a measure of the price and quality of vehicle available on the market. The negative impact of logsum variable on duration indicates that holding duration decreases as the expected utility of an alternative to the vehicle increases. Therefore, an attractive vehicle alternative would shorten the holding duration.
8.6 Differentiated Effects of Taxation Policies: A Simulation Analysis
Using the estimated models, we simulate scenarios of possible policy measures. The simulations yield the number of replacements, changes in vehicle share, expected annual traveling distance, and amount of CO2 emissions under the different scenarios. First, the “business as usual (BAU)” scenario describes a situation without a policy (Case 0: BAU). The other scenarios with policies are as follows.
Case 1: A 10 % increase in running costs from 117 to 129 Japanese yen per liter of gasoline.
Case 2: An increase in the holding cost. The increase in holding costs HC j for vehicle type j are calculated by Eq. (8.17):
where MVKM indicates mean annual traveling distance (i.e., 10,015 km/year), and FE j stands for the mean fuel efficiency of vehicle type j.
Case 3: An increase in the purchase costs. The cost is adjusted to be identical to that in Case 1. The increase in purchase costs PC j for vehicle type j are calculated by Eq. (8.18):
where MHD represents mean holding duration (i.e., 4.48 years).
The variables related to household and main-user attributes are assumed to remain unchanged, except the age of the main user. Moreover, we assumed that the dependence structure between annual traveling distance and holding duration remains unchanged (i.e., the copula parameter is fixed).
For the simulations, we first calculate the logsum value from the vehicle type choice model, which gives the attractiveness of vehicles available on the market. Second, the joint model of annual traveling distance and holding duration is estimated using this logsum value, and the expected annual traveling distance and survival probability of holding duration for each sample are calculated. For the households predicted to replace their vehicles (i.e., mean survival probability in the holding duration is less than 0.5), the vehicle type choice model is used to calculate the probability of replacement. These probabilities are summarized and combined with those of households that do not replace their vehicles, and the distribution of vehicle type share is calculated. Third, the mean fuel efficiency of the whole sample is estimated using the distribution of vehicle type share. Finally, the CO2 emissions are calculated by multiplying the mean fuel efficiency by the mean annual distance traveled.
The simulation results are shown in Table 8.5. The results are summarized in terms of relative change to the BAU scenario (Case 0). These results therefore predict the impacts of the respective policy measures only. The first row of Table 8.5 shows that an increase in running costs leads to a decrease in annual traveling distance, which seems logical. However, the rate of decrease in annual traveling distance is only 2.5 %. Increasing running costs influences holding duration in two ways. First, running cost has a direct negative impact on the duration of vehicle holding. Second, increases in running cost decrease traveling distance, which increases vehicle holding duration because these variables have negative interdependence. The direct effect dominates the indirect effect as shown in Table 8.5. Holding durations also decrease with an increase in running cost, and more vehicles are replaced by increasing running cost. This is attributed to the fact that the data in this study were collected in rural areas. Compared with large metropolitan areas, people’s mobility in rural areas depends greatly on private vehicles because of the lower level of public transportation services, and it is consequently difficult to reduce annual traveling distance. Therefore, the rate of decrease in the annual traveling distance is small, but the frequency of purchasing new vehicles with high fuel efficiency increases. In case 2, with increased holding cost, the annual traveling distance is decreased, and the number of replacements is increased. The simulation results are similar to those of case 1. Moreover, from the comparison between cases 1 and 2, the change in share of vehicles is caused by changes in the vehicle replacement rate. If the vehicle replacement rate is increased, the number of smaller vehicles is increased. Focusing on the results of case 3, we find that the annual traveling distance and vehicle share are not significantly changed.
From the perspective of environmental impact, increases in running cost have a considerable impact on reduction of CO2 emissions, followed by holding cost. However, increase in purchase cost contributes to a slight increase in CO2 emissions. This result indicates that the tax on vehicle use (i.e., an increase in fuel tax) is the most effective way to reduce CO2 emissions.
8.7 Conclusions
Calculations of fuel consumption and the resulting CO2 emissions from passenger vehicles need to take into account how cars are purchased and used. Accordingly, policies to reduce fuel consumption and CO2 emissions should be evaluated in a way that properly reflects buyers’ and users’ decisions. There are various interdependences related to decisions on household vehicle ownership and use. Classifying these decisions into the three aspects of choice of vehicle type, annual traveling distance, and holding duration, this study first developed an integrated model of these aspects in combination. Annual traveling distance and holding duration are jointly modeled based on a CMS model. In addition, a PCL model was adopted to represent vehicle type choice, and the expected maximum utility of vehicle type choices from the PCL model is introduced into the CMS model to describe the dependence of annual traveling distance and holding duration on choice of vehicle type. As a case study, questionnaire survey data on household vehicle ownership and use behavior between 1996 and 2006 were collected in the Chugoku region of Japan in 2006 and used to confirm the effectiveness of the integrated model. In this study, four common copula functions were compared empirically. As a result, the Clayton copula was found to be most suitable for the marginal function to describe both annual traveling distance and holding duration. The proposed CMS model with a Clayton copula is superior to the conventional model without considering interdependence between the two aspects of vehicle ownership. The estimated coefficients showed that annual traveling distance and holding duration are significantly correlated. It is also found that holding duration decreases as annual traveling distance increases because of the negative interdependence between the two variables. Moreover, the coefficient of the logsum variable in the vehicle holding duration was negative and significant. The negative impact on the vehicle holding duration indicates that it decreases as the expected utility in vehicle replacement increases.
Using the proposed model, a simulation analysis was conducted to examine the effects of vehicle-related taxes on household vehicle ownership and use as well as CO2 emissions. It was observed that taxation in the vehicle use stage has the strongest influence on reduction of CO2 emissions, and an increase in tax in that stage can significantly encourage people to purchase a vehicle with smaller engine displacement. It is difficult to prevent people purchasing vehicles because of their door-to-door convenience and private space, so taxation policies can balance people’s mobility needs and the negative impacts of using cars. Furthermore, increases in running costs tend not only to reduce annual traveling distance but also to increase the frequency of replacement of vehicles with those of smaller engine displacement. The frequent turnover of smaller vehicles may also be influenced by car users’ variety-seeking behavior and/or adaptation to changes of life stage. Fortunately, it is expected that such a shift will lead to a reduction of CO2 emissions from the improved energy efficiency of newly replaced vehicles.
From the above analysis, taxation policies could encourage people to own and use smaller vehicles, which usually have better energy efficiency than other types of vehicles. Under the influence of improved energy efficiency, however, there may be an energy rebound effect that decreases the expected energy saving or conversely increases energy consumption (i.e., the efficiency measures may backfire) (Greening et al. 2000; Sorrell et al. 2007; Vera and Denise 2009). Because analysis of such rebound effects is beyond the scope of this study, refer to Yu et al. (2013) in this book for a detailed discussion of rebound effects. Recently, in the area of CO2 emissions, carbon emission-differentiated vehicle taxes and carbon taxes as instruments of internalization have attracted increasing attention (OECD 2009; Giblin and McNabola 2009). Carbon taxes are charged directly based on the amount of carbon emissions during use, whereas carbon-differentiated vehicle taxes are charged when a vehicle is purchased. Carbon taxes are intended to reduce carbon emissions directly, and carbon-differentiated vehicle taxes are an attempt to influence vehicle ownership rather than use. To reduce CO2 emissions from passenger vehicles, other effective measures should be taken in combination depending on the local context. CO2 emissions can also be reduced by other strategies, such as enforcing regulations and institutional rules (e.g., setting standards for CO2 emissions), technological development (e.g., EV/PHEV, ITS), and education (e.g., motivating travel behavior change by providing travel-related and non-travel-related information as well as effective incentives). From a much broader perspective, technological development could include the transformation of urban structures (e.g., compact cities, transit-oriented urban structures, polycentric urban structures, and walkable and bikable cities) and the introduction of comprehensive transportation networks with better connectivity and accessibility. All these measures are expected to influence vehicle ownership and use behavior in different ways and are worth examination in future. To examine the effects of the above measures comprehensively, changes in behavior should be clarified systematically, and behavior models should be further improved by reflecting the decision-making mechanisms in the behaviors concerned.
References
Adler T, Wargelin L, Kostyniuk L, Kalavec C, Occiuzzo G (2003) Incentives for alternate fuel vehicles: a large-scale stated preference experiment. Paper presented at the 10th international conference on Travel Behavior Research, Luzem, August 10–15 (CD-ROM)
Best H, Lanzendorf M (2005) Division of labour and gender differences in metropolitan car use – an empirical study in Cologne, Germany. J Transp Geogr 13:109–121
Bhat CR, Sen S (2006) Household vehicle type holdings and usage: an application of the multiple discrete-continuous extreme value (MDCEV) model. Transp Res B 40:35–53
Brownstone D, Bunch DS, Train K (2000) Joint mixed logit models of stated and revealed preferences for alternative-fuel vehicles. Transp Res B 34:315–338
Chu C (1989) A paired combinatorial logit model for travel demand analysis. In: Proceedings of the fifth world conference on transportation research, vol 4, Ventura, CA, pp 295–309
De Jong G (1996) A disaggregate model system of vehicle holding duration type choice and use. Transp Res B 30:263–276
Giblin S, McNabola A (2009) Modelling the impacts of a carbon emission-differentiated vehicle tax system on CO2 emissions intensity from new vehicle purchases in Ireland. Energy Pol 37:1404–1411
Gilbert CCS (1992) A duration model of automobile ownership. Transp Res B 26:97–114
Greening L, Greene D, Difiglio C (2000) Energy efficiency and consumption – the rebound effect – A survey. Energy Policy 28(6–7):389–401
Hensher DA (1985) An econometric model of vehicle use in the household sector. Transp Res B 19:303–313
Koppelman FS, Wen CH (2000) The paired combinatorial logit model: properties, estimation and application. Transp Res B 34:75–89
Mannering F, Hamed M (1990) Occurrence, frequency and duration of commuter's work-to-home departure delay. Transp Res B 24:99–109
Mannering F, Kim S, Barfield W, Linda N (1994) Statistical analysis of commuters route, mode and departure time flexibility. Compendium of papers CD-ROM, the 73rd annual meeting of the Transportation Research Board, Washington, DC, January 9–13
Marubini E, Valsecchi MG (1995) Analysing survival data from clinical trials and observational studies. Wiley, New York
Nelsen RB (2006) An introduction to copulas, 2nd edn. Springer, New York
Nurul Amin ATM (2009) Reducing emissions from private cars: incentive measures for behavioural change. UNEP – Green Economy Initiative
OECD (2009) The scope for CO2-based differentiation in motor vehicle taxes: in equilibrium and in the context of the current global recession. ENV/EPOC/WPNEP/t(2009)1/Final, OECD, Paris.
Pendyala RM, Kostyniuk LP, Goulias KG (1995) A repeated cross-sectional evaluation of car ownership. Transportation 22:165–184
Potoglou D, Kanaroglou P (2007) Household demand and willingness to pay for clean vehicles. Transp Res D 12:264–274
Sorrell S (2007) The Rebound effect: An assessment of the evidence for economy-wide energy savings from improved energy efficiency. UK Energy Research Centre, London
Vera B, Denise Y (2009) Time-saving innovations, time allocation, and energy use: Evidence from Canadian households. Ecolog Econo 68:2859–2867
Yu B (2012) Integrated analysis on household energy consumption behavior across residential and transport sectors: model development and applications. Doctoral Dissertation, Hiroshima University
Yu B, Zhang J, Fujiwara A (2013) Integrated household energy consumption behavior analysis across the residential and transport sectors. In: Fujiwara A, Zhang J (eds) Sustainable transport studies in Asia, Chap. 9. Springer, Japan
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Japan
About this chapter
Cite this chapter
Kuwano, M., Fujiwara, A., Zhang, J., Tsukai, M. (2013). Taxation Policies for Promoting Fuel-Efficient Vehicle Ownership and Use. In: Fujiwara, A., Zhang, J. (eds) Sustainable Transport Studies in Asia. Lecture Notes in Mobility. Springer, Tokyo. https://doi.org/10.1007/978-4-431-54379-4_8
Download citation
DOI: https://doi.org/10.1007/978-4-431-54379-4_8
Published:
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-54378-7
Online ISBN: 978-4-431-54379-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)