
Abstract
Wind speed estimation and station-keeping control for stratospheric airship are studied. A mathematical model of the stratospheric airship flying against the wind is derived. Then using the position information of the airship, an extended Kalman filter (EKF) is designed to estimate the speeds of the airship and the wind. Numerical simulations show the filter is effective and robust so that it can be used in not only wind speed estimation but also station-keeping control of the stratospheric airship.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
17.1 Introduction
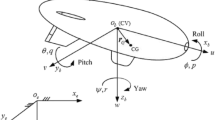
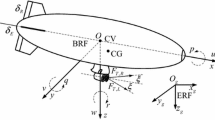
The stratosphere airship is an important floated platform which works in about 20 km altitude for a long time with a lot of payload. It can play a role similar to man-made satellite in the fields of communications relay, remote sensing to the ground, and air traffic control. Compared with the satellite, the stratosphere airship which can move in a broader range, without the limitation of the orbit, is helpful to observe more accurately, and has advantages in energy conservation and environmental protection [1–4]. At present many countries, such as the US, Russia, Germany, Britain, Japan, Korea, Israel, and China, are stepping up the research of the stratosphere airship [5–9].
Wind speed estimation is an important problem of the stratosphere airship. Due to the earth’s rotation, there is a strong west wind in mid-latitude stratosphere while the wind speed changes along with the height, the latitude and longitude, and the season. To work in a fixed-point, the airship must overcome the influence of the wind based on solar energy, which requires to measure wind speed near the airship in real time and accurately. Because the stratosphere airship moves slowly, the widely used air anemometer’s error is too large to meet the need of theoretical analysis and actual control of the airship. So, it is necessary to investigate a new method to measure of estimate the stratosphere wind speed.
In this paper, the real-time stratosphere wind speed is estimated based on the position information of the airship. As the airship always flies against the wind to reside in a fixed-point, its movement can be simplified to one-dimensional motion of the center of mass. This paper established the one-dimensional motion model of the stratosphere airship, in which the wind speed is a random input while the position of the airship which can be measured by GPS or ground station is the output. Then an extended Kalman filter (EKF), which is used to estimate the current wind speed and speed of the airship is designed. The effectiveness and robustness of the EKF method are validated by numerical simulation.
The structure of this paper is as follows. The airship one-dimensional motion model is established in the second section. In the third section, the current airspeed and wind speed are estimated by EKF. The effectiveness and parameter variation robustness of EKF are proved by numerical simulation in the fourth section. The fifth section presents the application of wind speed estimation in station-keeping control for stratospheric airship.
17.2 The One-Dimensional Motion Model of the Stratosphere Airship
Consider the problem to keep a stratosphere airship which uses the hard airbag structure at a fixed-point in a horizontal plane. Suppose the yawing moment is balanced by the lateral moment produced by the wing propulsion system and the vertical tail so that the airship’s head is always against the wind, while the thrust T balances with the wind resistance \( R \) and the additional inertia forces \( R_{a} \). In this case, the model of the airship can be simplified to the one-dimensional motion and the force analysis is shown in Fig. 17.1.

Force analysis of the airship
Let \( m \) be the mass of airship, \( x \) and \( \nu_{g} \) be the airship displacement and the airship speed respectively. According to Newton’s second law, the kinematics equations are
The resistance and the added mass inertia force are expressed as
where \( \nu_{w} \),\( \rho \),\( C_{x} \) and \( S \) are the wind speed, air density, aerodynamic coefficient, and the airship’s reference area. Let \( m_{0} \) be the add mass which can be calculated as
Let \( V \) be the airship volume and \( k \) be the inertia factor.
Suppose the stratosphere wind field is composed of constant wind \( V_{a} \) and gust \( \omega (t) \). The expression of wind speed is to add these two together [10]
Suppose \( \omega (t) \) is a color noise produced by a zero mean white noise source \( \eta (t)\sim N(0,Q) \) through the shaping filter [11]
in which \( L_{\it{H}} \) is the longitudinal integral scale of lever wind, \( \sigma_{\it{H}}^{2} \) is the variance of wind speed.
Substituting (17.2), (17.3) and (17.4) into (17.1), we have
And with (17.5), we get
Let the state variables be
and
Based on the formulas (17.1), (17.5) and (17.7), the system-state equation can be obtained as
On the other hand, the airship position can be measured by GPS or ground station, and the output equation of the system is
where \( d(t)\sim N(0,R) \) is the measurement error.
17.3 Wind Speed Estimation Based on EKF
17.3.1 Algorithm of EKF
EKF is an effective filter method for nonlinear system [11, 12]. Consider the nonlinear system
where \( \eta (t) \) and \( d(t) \) are the system model noise and measurement noise. Discretizing the system (17.13) and assuming the sampling period is \( \Delta t \), we get
where
In formula (17.14), \( {\it{\nu}}_{{{\text{k - }}1}} \) and \( d_{k} \) not only contain the model noise and measurement noise, but also an approximation discrete error. The EKF algorithm includes prediction equations and filtering equations [11], the rediction equations are
while the filtering equations are
where, \( \boldsymbol{\hat{x}}_{\boldsymbol{k}} \) is the estimation of \( \boldsymbol{x}_{k} \) and
with the initial values
the state \(\boldsymbol{ x} \) can be estimated through the extended filter equations.
17.3.2 The Wind Speed Estimation by EKF
Plugging (17.10) into (17.15), we have
in which
Comparing (17.12) with (17.14), we obtain
And \(\boldsymbol{Q_{k}} \) and \( \boldsymbol{R_{k}} \) can be calculated based on (17.9) and (17.18) according to the literature [12]
Finally, substitute (17.9), (17.21), (17.22) and (17.23) into (17.16) and (17.17), and then carry out iterative operation under the initial condition.
17.4 Numerical Simulations of Wind Speed Estimation
The numerical simulation is adopted to prove the effectiveness of EKF in this section. First, the accuracy of the method is proved by supposing that the model parameters are known accurately. Then the situation of the error model parameters verifies the robustness of this method.
17.4.1 The Situation of Accurate Model Parameters
The model parameters are taken as Table 17.1. The initial condition is \( \varvec{x}_{0} = [0,0,5,0]^{T} \), \( \varvec{P}_{0} = {\text{diag}}\left( {\left[ {\begin{array}{*{20}c} 1 & 1 & 1 & 1 \\ \end{array} } \right]} \right) \). The actual values of airship displacement, velocity, and wind speed can be calculated by the airship movement model and the wind speed model, which are shown in Figs. 17.2 and 17.3, while their estimation values can be obtained through the EKF algorithm. The deviation between the estimations and the actual values is shown in Fig. 17.4. As can be seen, the error is almost zero after 50 s, which shows that the EKF filter is effective.

The displacement of airship

The airship speed and the wind speed

The estimation error of EKF
17.4.2 The Error of Model Parameters
First, consider that the structural parameters of the airship error exists. The other airship parameters are accurate except the add mass. Its true value is \( m_{0} = 3.000 \times 10^{3} ({\text{kg}}) \). The estimation errors of the airship speed and wind speed are shown in Fig. 17.5, which indicates that EKF is robust to the add mass error.

\( m_{0} = 3.000 \times 10^{3} \left( {\text{kg}} \right) \) estimation error
Second, assume that the wind speed model parameters, such as the wind speed variance and the wind speed longitudinal integration scale, are not accurate. Their true values are \( \sigma_{H} = 8.000 \times 10^{ - 1} ,L_{H} = 6.000 \times 10^{2} \). The estimation errors of the airship speed and wind speed are shown in Fig. 17.6, which shows that the measurement method of EKF is robust to these two parameters.

\( \sigma_{H} = 8.000 \times 10^{ - 1} ,L_{H} = 6.000 \times 10^{2} \) estimation error
Finally, consider the aerodynamic parameter \( C_{x} \) exists error and its real value is \( C_{x} = 6.500 \times 10^{{{ - }3}} \). The measurement errors of the wind speed and the airship speed are shown in Fig. 17.7. From the figure, the airship speed can be still estimated accurately by the filter, but there exists error to estimate the wind speed. It indicates that the EKF is sensitive to the aerodynamic parameter error. To measure the wind speed accurately, we need more in-depth study of the aerodynamics to calculate \( C_{x} \) precisely.

\( C_{x} = 6.500 \times 10^{ - 3} \) estimation error
17.5 The Station-Keeping Control with Wind Speed Estimation
The method of wind speed estimation based on EKF is applied to the station-keeping control for stratospheric airship in this section. Assume that the airship is located at −2 km at initial moment and is expected to be controlled and resided near the origin. In this case, a saturated PD wind speed controller is adopted
in which \( K_{p} \) is the proportionality factor, \( K_{d} \) is the differential coefficient, \( r \) is the target position.
A saturated unit
is following the PID controller. Let
where \( \hat{x}_{1} \), \( \hat{x}_{2} \), \( \hat{x}_{3} \), \( \hat{x}_{4} \) are the outputs of the filter. \( \dot{\hat{x}}_{2} \) and \( \dot{\hat{x}}_{4} \) are obtained from \( \hat{x}_{2} \) and \( \hat{x}_{4} \) through the finite difference. The control structure of the whole closed-loop simulation system is shown in Fig. 17.8.

Closed-loop simulation system of the airship station-keeping control
Let \( K_{p} = 300 \), \( K_{d} = 20{,}000 \) and other accurate model parameters are known. A numerical simulation is employed to the station-keeping control.
The displacement of airship and the controller output are shown in Fig. 17.9. Figure 17.10 is the magnification of displacement when the airship arrives at the origin. The red curve represents the actual displacement while the green curve represents the filter estimated value. It can be seen that the error is almost zero. There is a small deviation between the actual value and the estimated value. Besides, the airship can be controlled and resided near the origin by using PD controller with the estimated wind speed. The deviation between the airship displacement and origin is within 5 m. The controller is a simple saturated PD controller without adding the estimated wind speed as follows:

The airship displacement and the controller output (The controller with wind speed estimation)

The enlarge of the real and estimated displacement (The controller with wind speed estimation)
\( K_{p} \), \( K_{d} \) are known. The airship displacement and the controller output shown in Fig. 17.11. Figure 17.12 is a partial amplification of the airship displacement near the origin. As can be seen from the figure, the deviation between the airship position and the origin is within 10–15 m, which is significantly greater than the control results of the PD controller with wind speed estimation. Therefore, it is necessary to estimate the wind speed and apply it to the station-keeping control of stratospheric airship.

The airship displacement and the controller output (The controller without wind speed estimation)

The enlarge of the real and estimated displacement (The controller without wind speed estimation)
17.6 Conclusion
This paper proposes to estimate the stratospheric wind speed and the airship speed with the position information of the airship. The EKF is designed based on the one-dimensional motion model of the airship. Numerical simulations show that EKF is accurate in estimating wind speed, has robustness against some model parameters’ uncertainty, and can be used in the station-keeping control of the airship. These results provide a foundation for further studies of wind speed estimation and station-keeping control of stratospheric airship.
References
Li Z, Wu L, Zhang J (2012) Review of dynamics and control of stratospheric airships. Mech Prog 42(4):482–493 (in Chinese)
Fan C (2005) A new develop mobile communication—the research of stratospheric communications. Mod Electron Technol 210(19):1–3 (in Chinese)
Khoury GA, Gillett JD (1999) Airship technology. Cambridge University Press, London
Toshitaka T, Takashi A (2001) Effects of meteorological condition the operation of a stratospheric platform. In: The 3 rd Stratospheric Platform System Workshop, Tokyo, Japan
Nayler A (2003) Airship activity and development world-wide. AIAA 2003–6727
Sano M, Komatsu K, Kimura J et al (2003) Airship shaped balloon test flights to the stratosphere. AIAA 2003–6798
Harada K, Eguchi K, Sano M et al (2003) Experimental study of thermal modeling for stratospheric platform airships. AIAA 2003–6833
Lin X, Hong L, Lan W (2013) One dimensional trajectory optimization for stratospheric airship with varying thruster efficiency. In: 10th IEEE International Conference on. IEEE, pp 378–383
Hong L, Lin X, Lan W (2014) Mode switch sequence analysis on one-dimensional trajectory optimization of stratospheric airships. Control Int Syst 42(2):151–158
Nichita C, Luca D, Dakyo B et al (2002) Large band simulation of the wind speed for real time wind turbine simulators. IEEE Trans Energy Convers 17(4):523–529
Xu M, Ding S (2003) Flight Dynamics. Science Press. Beijing, China, pp 14–26 (in Chinese)
Qin Y, Zhang H, Wang S (2012) Kalman filter and the principle of integrated navigation (the second edition). Northwestern Polytechnic University Press, Xi’an (in Chinese)
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Shen, S., Liu, L., Huang, B., Lin, X., Lan, W., Jin, H. (2015). Wind Speed Estimation and Station-Keeping Control for Stratospheric Airships with Extended Kalman Filter. In: Deng, Z., Li, H. (eds) Proceedings of the 2015 Chinese Intelligent Automation Conference. Lecture Notes in Electrical Engineering, vol 337. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-46463-2_17
Download citation
DOI: https://doi.org/10.1007/978-3-662-46463-2_17
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-46462-5
Online ISBN: 978-3-662-46463-2
eBook Packages: EngineeringEngineering (R0)