
Abstract
The traditional acquisition technology of low orbit GPS signal has been widely applied in the design of GPS navigation receiver. However, navigation receiver can only accept the navigation signal which comes from the other end of the earth when running above the navigation constellation, which results the decline of GPS navigation visibility and signal power, and the navigation signal power from high orbit navigation receiver will reduce 10 dB at least than low orbit navigation receiver and traditional fast acquisition design can not meet design requirements of high orbit navigation receiver. Therefore, this paper present a design which increase times of coherent integration to improve ratio of carrier and noise of received signal, at the same time, it uses full link simulation by simulink to verify feasibility of the design, the final design of weak signal acquisition, through the test of Xilink company Virtex4 series FPGA chip based on the weak signal acquisition sensitivity up to −176 dB. Because the GLONASS navigation system and BDS navigation and GPS navigation system using spread spectrum communication system, different with GPS navigation system in production of presucode ratio and presurange and the carrier frequence parameters. Therefore, this fast acquisition algorithm for GPS weak signal adapt to the design of GLONASS navigation receiver and BDS navigation receiver.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Preface
Satellites running in high orbit can only receive GPS signal from the other side of the earth. Because of the shield of earth and energy loss through free space field, the visibility and signal intensity of GPS satellites decline very much for user satellites. There may be zero to three visible GPS satellites under this circumstances, even the visible GPS signal can hardly be received [1]. There are several features of high orbit satellites as follow:
-
Weak visibility of GPS satellite:
-
Satellites running in high orbit can receive GPS signal. Because the GPS satellites antenna point to the earth, the GPS receiver fixed on high orbit satellites can only receive the signal from the other side of the earth, resulting the weak visibility of GPS signal.
-
Low signal power:
-
Long distance transmission with atmosphere damping and ionosphere delay give rise to low signal power to be received.
-
Difficulty of signal capture:
-
Low GPS signal power make the capture of visible satellite a troublesome. For this reason, the study of GPS weak signal capture contributes much to the independent positioning of high orbit satellites and has important engineering application value.
2 Code Phase Compensation
To improve the capture sensitivity of GPS signal, the pre-detection integral time must be extend (pre-detection integral time need to be less half of navigation message bit). But in this way, the main problem is that code phase drift caused by code Doppler result in the damping, shifting or widening of correlation peak, affecting the capture performance. Therefore it is necessary to make some compensation, namely code Doppler compensation [2]. Figures 17.1, 17.2 give the output of correlation with code Doppler compensation or not. It is obvious that the correlation become widening and the energy decline.

No using code Doppler compensation correlation peak

Using code Doppler compensation correlation peak
Code Doppler is caused by the relative movement between satellite and receiver. Its calculation formula is as follow:
where f c is code rate.
During the pre-detection integral time, relative phase drift between received code and local code is:
where \( T_{PIT} = N_{nc} T_{coh} \) is pre-detection integral time. Code phase drift lead to damping, shifting or widening of code self-correlation peak. GPS signal capture is three-dimensional search including C/A code number, C/A code phase and carrier frequency. Using time domain signal correlation capture GPS signals can not meet the requirements of real-time GPS capture. Taken parallel capture technology based on FFT (Fast Fourier Transform) can effectively improve the efficiency of capture.
3 Parallel Frequency Acquisition
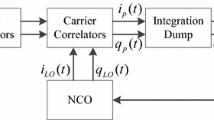
Parallel frequency search algorithms capture process goes as follows: first, the input digital IF signal and the internal copied carrier mix each other, then correlation operate with the copied C/A. So I and Q correlation results thus obtained is a matter of self-correlation function R(τ) and the residual carrier frequency loss factor functions in \( \sin c(f_{e} T_{coh} ) \) of the product; then, the correlation results \( i + jq \) in the time domain by the Fourier transform of the signal transformed to the frequency domain, which reflects the intensity of each frequency component of the correlation results \( i + jq \); finally, the frequency field amplitude of the signal is analyzed to find out the value of the residual frequency f e and a received signal corresponding to the carrier frequency. If the copied C/A code phase is different from the received signal C/A code phase, the low correlation between them will suppress the amplitude of the signal before the Fourier transform and transform such fourier leaves no change in the results of a large amplitude, so the receiver may conclude that the received signal is not located on this search code phases corresponding to the band. Only when the copying C/A code phase and the received C/A code phase are aligned, the amplitude of the output of the Fourier transform may be an obvious peak, and the peak corresponding to the frequency band of the Fourier transform is the estimated value of the frequency error, and the copied C/A code phase signal is naturally an estimate of the number of the received signal phase. Thus the two-dimensional search used Fourier transform converts to a one-dimensional code phase search, thus improving the signal acquisition time [3] (Fig. 17.3).

Frequency parallel capture diagram
4 Parallel Code Phase Acquisition
Similar to the way of the parallel search for frequency, when the frequency is be searched by sliding, the parallel search of code can be achieved. The algorithm for parallel search and capture of code is as follows: when the digital IF signals were respectively mixed with the carrier signal for the copy of sinusoidal and cosine which respectively belong to I branch and Q branch, parallel code phase search algorithm is not these results are correlated with C/A by digital correlator directly, but doing fourier transform for the plural mixing results \( {i} + {jq} \), and then the transform results are multiplied with the conjugate value of fourier transform for copy C/A code. Then, the multiplication results input the module of Inverse Fourier transform obtained in the time dimensions of correlation results. Finally, the correlation value is detected by analyzing the result of the determination signal is being or not. When completed the currently of band search and detection. The receiver then let the carrier numerically controlled oscillator copied to another sin and cos values with carrier frequency. Next, a similar frequency band to complete the search and detection (Fig. 17.4).

Code parallel capture diagram
Compared parallel frequency acquisition and parallel code phase acquisition: for example, for the same two-dimensional search range, 41 search bands and 2,046 search code with a total of 83,886 (41 × 2,046) search unit. Two-dimensional search need to search for 83,886 times, parallel frequency search needs to search 2,046 times, parallel code phase search just search 41 times, but search speed is consumed by costs in exchange for a share of hardware resources required the large amount of RAM storage resources when achieved parallel code phase acquisition algorithm. This is also the reasons of parallel code phase search algorithm does not being widely used, however, the high-capacity FPGA chip is introduced, Parallel code phase acquisition algorithm has the effective realization of the hardware platform.
5 System Design for GPS Signal Capture Algorithm
To achieve high sensitivity to capture fast, so use the parallel code phase search acquisition mode for fast capture, combined with the carrier phase compensation and code Doppler compensation technique to achieve weak GPS signal capture algorithm [4]. Weak signal capture baseband processing module (circuit) structure chart as follows: signal capture circuit consists of preprocess, the relevant calculation mode, non-coherent accumulation and peak search and so on (Fig. 17.5).

Code parallel signal capture processing flow diagram
5.1 AD Sampling Data Preprocess
Finished the AD sampling after data entering signal capture channels, in order to be able to adapt to the requirements of the signal capture algorithm, the ADC sample preprocess data will be into data preprocessing module. In addition, to avoid data bit flip, using 10 ms coherent accumulation, this module mainly to complete: In AD signal mixed to the baseband signal, a low pass filter, down sampling and 10 ms data buffer (Fig. 17.6).

AD sampling data pre-processing flow diagram
5.2 Doppler Filtering and Removing Modules
Filter select comb filter, the 10 ms data was accumulated by the adder 1 ms data for increase signal fast capture sensitivity. Due to the Doppler frequency, leading to phase of the carrier was changed in the time of 1 ms, then need carrier phase compensation during the signal processing. After the carrier phase compensation, according to the stepping frequency to remove the carrier Doppler frequency operation. Then performed of Down-sampling operation as in Fig. 17.7.

Doppler filtering and removing structural diagram
Assuming during a starting position in the n-th sampling point during 1 ms. Removed if carrier phase after removal of:
so the k-th sample point in the m-th of 1 ms, after removal of the carrier frequency carrier phase is:
Removed Carrier Doppler and the results of the carrier Doppler compensation is:
Therefore, construct the following correction:
The carrier Doppler remove and compensation results is:
Next, the value of study formula \( {\Delta} \theta \left( {m, k, n} \right) \):
Can be obtained:
Can be obtained:
Therefore, can be obtained:
Local estimated Doppler frequency shift \( \hat{f}_{d} \). The phase correction amount is:
Elimination of the carrier and the carrier Doppler compensation results is:
5.3 Non-coherent Accumulation Module
In order to achieve the capture of weak signals, by increasing the non-coherent accumulate times, to obtain high signal gain. Local C/A code generator by a fixed code rate code phase offset in 10 ms coherent accumulate is smaller, impact can be negligible for the coherent integration [5, 6], multiple non-coherent accumulation times due to the code phase offset is relatively large. Therefore, the code phase offset must be compensated, assuming the correlation function is:
Within the \( nN_{coherent} T_{p} \) seconds, correlation function of the sequence of the formula is obtained by FFT operation:
Clearly visible:
In the above formula:
Assume:
Then:
Or:
6 Link Simulation and Hardware Implementation
After Simulink simulation link verification, the link including an analog signal source GPS signal pre-processing, the carrier Doppler removed, the carrier phase offset, the code phase offset, non-coherent accumulation module, through this link simulation, the simulation output results meet design requirements.
Significant correlation peak, Amplitude without attenuation, Width done not extended; Signal is achieved captured. When the antenna signal power of −185 dBW (Figs. 17.8, 17.9).

SimulinkFull link simulation diagram

Matlab simulation results of the analysis of the correlation peak
Ultimately based on Xilinx’s FPGA chip of Virtex4 series for verify weak signal capture designs. Use Spirent simulator source, run static satellite navigation orbit, signal Doppler is 0, the satellite number is 1, the signal power is −176 dBW (without antenna gain), you can see the correlation peak is obvious. And satisfies the sinc envelope waveform, the largest correlation peak when the Doppler frequency search is 0 Hz, Doppler search frequency offset 50 Hz (10 ms coherent accumulation), the second largest correlation peak; 100 Hz Doppler shift frequency search (10 ms coherent accumulation), correlation peak was drowned in the noise, the results meet the theoretical sinc envelope waveform.
In order to facilitate seen in weak signal conditions correlation peak, use FPGA debugging tools (Chip scope) to view accumulator, the results as shown (Figs. 17.10, 17.11, 17.12, 17.13).

Signal power −166 dBW (without antenna gain) to capture the peak

Signal power −172 dBW (without antenna gain) to capture the peak

Signal power −169 dBW (without antenna gain) to capture the peak

Signal power −176 dBW (without antenna gain) to capture the peak
7 Conclusion
This paper analyzes two kinds of GPS signal quickly capture technology and GPS weak signal acquisition code Doppler compensation, Application of Matlab Simulink simulation tool to build full link verify code parallel fast capture algorithm and code Doppler compensation algorithm can be realized. By this method can improve the acquisition sensitivity of the GPS signal. The signal power of the antenna can be effective capture when GPS signals power is −185 dBW.
References
Hou W, Chou P, Zhao M (2010) The research of high sensitivity GNSS capture technology. The paper of Zhejiang University Degree, pp 49–53
Zhang L, Li H, Cui X, Lu M (2013) Doppler code compensation and local clock biased with weak GNSS signal acquisition. Simul Comput 8
Xie G (2009) GPS principle and receiver design. Electronic Industry Press, Beijing, pp 366–374
Wang S, Mao Z, Xie C (2009) Base on GPS signal research and pre-capture hardware implementation research: microelectronics and computer
Fast fourier transform v3.2, Xilinx logicore data sheet, 2005.09
GP2015 GPS Receiver RF Front End.Zarlink semiconductor data sheet, 2005.05
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Wang, Y., Gao, Y., Wang, M. (2014). The Implementation of Rapid Acquisition Algorithm for GPS Weak Signal by Using FPGA. In: Sun, J., Jiao, W., Wu, H., Lu, M. (eds) China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume I. Lecture Notes in Electrical Engineering, vol 303. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-54737-9_17
Download citation
DOI: https://doi.org/10.1007/978-3-642-54737-9_17
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-54736-2
Online ISBN: 978-3-642-54737-9
eBook Packages: EngineeringEngineering (R0)