
Abstract
High accuracy GNSS receivers generally eliminate ionospheric delay by adopting dual or multi frequency error correction model to obtain desirable positioning results. However, dual-frequency GNSS receivers also face with radio frequency interference (RFI) in actual application, especially in complicated electromagnetic environment. In this paper, the analysis of carrier to noise ratio (C/N0) and standard deviation of positioning in interference was introduced, and a test on the actual performance of a typical dual-frequency GPS receiver in interference at the two working frequencies was presented. The test results showed that: as the intensity of interference increased, the C/N0 of signal descends obviously, thereupon the pseudo-range measurement precision for viewed satellites declined, leading to the loss of positioning accuracy. DGPS carrier phase measurement was recommended under interference condition in this article. By the carrier phase differential approach, the measurement error caused in the course of RFI was eliminated, and better results can be achieved if the number of satellites viewed is favorable.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
High accuracy GNSS receivers generally eliminate ionospheric delay by adopting dual or multi frequency error correction model. A dual-frequency receiver could eliminate more than 90 % error caused by ionospheric delay [1], obtain desirable and required positioning results in accurate navigation, precision positioning, map surveying, etc. However, dual-frequency GNSS receivers also face radio frequency interference (RFI) during the application in complicated electromagnetic environment. Under the impact of deliberate or unintentional interference, the performance in signal acquisition and tracking degrades, or even worse, the receiver loses lock with carrier signals, leading to less reliable surveying results as a result.
There are a number of studies on the performance of GPS receivers, mostly single frequency receiver, in interference; many researches have presented mainly focus on the signal processing. For example, Su et al. testified the feasibility of deliberate interference on GPS, introduced the frequency characteristics of jamming signal. Results showed that GPS signal can be jammed by deliberate interference, even if the interference is sine wave signal [2]. Feng et al. [3] studied the jamming frequency characteristics of receiver further. Zhou et al. has analyzed pseudo-range measurement accuracy and performance of DLL/PLL in interference mainly focus on the receiver signal processing. Results showed that the influence of interference is to increase the internal noise, and to reduce the value of C/N0, eventually lead to the loss of accuracy [4, 5]. Jiao and Dou carried out studies mainly focused on the anti-jamming effectiveness evaluation of GPS receivers [6, 7].
In this paper, a test on the actual performance of a typical dual-frequency GPS receiver in RFI at two center frequencies was presented, the impact of interference on pseudo-range positioning accuracy and the causes of the error were analyzed.
2 Analysis of the Impact of Interference on Receiver
-
Carrier to Noise Ratio
In the signal processing, the signal quality of GNSS receivers was indicated as carrier to noise ratio (C/N0).The carrier to noise ratio density under the condition of jamming is as follow [8].
C/N 0 for the carrier to noise density without interference. J/S is a ratio for the jamming power. R C for basic code rate of pseudo random noise (PRN). Q for the adjustment coefficient of spread spectrum gain.
Formula (13.1) showed that the C/N 0 of signal will decline as the interference occurs, and signal acquisition, carrier tracking, data demodulation will deteriorate simultaneously.
-
The Standard Deviation
The standard deviation was used to depict the measurement precision of the receiver. According to Ref. [6], standard deviations of pseudo-range measurement and carrier phase measurement were functions of C/N0. Pseudo-range measurement deviation and carrier phase measurement deviation are as follows [6]:
\( \Delta \) for code length, B DLL for noise bandwidth of DLL; d for the distance between front correlator and the real-time correlator, B ID for the noise bandwidth of integrate and dump filter.
B PLL for noise bandwidth of PLL; B ID for noise bandwidth of integrate and dump filter. λ for the wavelength of the carrier.
In interference, the value of C/N 0 is much larger than B DLL , B ID and B DLL , thus formula (13.2) and (13.3) will be simplified as follows.
Interference will increase the thermal noise of the GPS receiver, making pseudo-range measurement error and carrier phase measurement error increased.
3 Test of the Impact of Interference on Pseudo-range Measurement
To study the variation of pseudo-range measurement accuracy in interference, a HP8642 signal generator was used as jamming resource, sending out sine wave signal, which arrived at the antenna of GPS receiver. Meanwhile we use a spectrum analyzer to monitor the intensity of interference.
Test object was a NovAtel RT2 dual-frequency GPS receiver, yields accuracies of 10 m (SEP).
3.1 Impact of Interference at L1 Frequency on Pseudo-range Measurement
Firstly, we send jamming signal at L1 frequency (1,575.42 MHz), increased jamming power 1 dB each time step-by-step until navigation signals were completely shielded, observed the positioning accuracy and stored satellites observation for data processing.
3.1.1 Pseudo-range Positioning Accuracy
Results showed that the serial of pseudo-range point positioning error can be divided into three stages (Fig. 13.1):

Curve variation of pseudo-range positioning error in the interference at L1 frequency
-
In the interval [−106 dBm, −97 dBm], the variation of pseudo-range point positioning error was kept within 10 m, the impact of jamming can be ignored.
-
In the interval [−96 dBm, −87 dBm], the serial of position error showed that the receiver was influenced by jamming for a certain extent, and there came out same outliers in pseudo-range positioning data.
-
Error became even larger as the increasing signal density. When the jamming power reached −82 dBm, the receiver was out of service.
3.1.2 Analysis
On the basis of formula (13.4) and (13.5), C/N0 and standard deviation were key indicators of GPS receivers; therefore they were extracted from observation data for analysis.
From Figs. 13.2 and 13.3 we can see that:

Curve variation of carrier to noise ratio (C/N0) of L1 and L2 carrier in the interference at L1 frequency

Curve variation of pseudo-range measurement standard deviation of L1 and L2 carrier in the interference at L1 frequency
-
The C/N0 of L1 signal declined relatively slowly and the C/N0 of L2 signal hardly decreased while jamming power was less than −97 dBm, the standard deviations were stable.
-
Then in the interval [−96 dBm, −82 dBm], the C/N0 of L1 signal showed an evident downward trend and the C/N0 of L2 signal began to fluctuate, the pseudo-range measurement standard deviations of both L1 and L2 signals became larger simultaneously. When the jamming power was larger than −82 dBm, the quality of two carrier signals deteriorate, and the standard deviations were out of normal range.
In the process of point positioning, firstly dual-frequency GPS receivers finish the acquisition of the coarse acquisition code (C/A), then C/A code will guide the acquisition of the precision code (P) to realize frame synchronization; the tracking of P code still need C/A code for synchronization. Therefore, when the impact on the receiver could not be eliminated, the L2 carrier signal would be affected evidently as the C/N0 of L1 carrier signal declined.
3.1.3 Pseudo-range Differential Measurement
According to spatial correlation of the error caused through signal propagation within short distance, pseudo-range differential measurement calculate position of the rover station on the principle of relative position by receiving pseudo-range correction (PRC) and range rate correction (RRC) given by the reference station. Figure 13.4 showed the variation of pseudo-range differential measurement accuracy in the interference at L1 frequency.

Curve variation of pseudo-range differential measurement error in the interference at L1 frequency
In the interval [−134 dBm, −90 dBm], pseudo-range differential position error was kept within 6.5 m. As interference power increased, observed satellites of the rover decreased thereupon, the pseudo-range differential measurement accuracy became deteriorated.
Interference was not the common source of error, it merely affected the rover station, and thus the correction for the interference was not given by the reference station. However, results showed the error was eliminated after data processing if observed satellites were enough for pseudo-range differential.
Analysis found that the Impact of interference is similarly to the effects of signal masking, will reduce the number of satellites, make the distribution of satellites worse and reduce the value of position dilution of precision (PDOP), lower measurement accuracy. Therefore, the conclusion is pseudo-range differential measurement approach will improve the quality of position if the number of viewed satellites is favorable, otherwise the error can not be eliminated.
3.2 Impact of Interference at L2 Frequency on Pseudo-range Measurement Accuracy
Then, we adjust the jamming signal frequency to 1,227.60 MHz, increased signal intensity step-by-step, the test results are as follows.
3.2.1 Pseudo-range Pointing Accuracy
-
In the interval [−85 dBm, −72 dBm], the variation of pseudo-range positioning accuracy kept within 20 m, the effects was relatively small.
-
The error increased rapidly as the increasing of jamming power, the maximum error was over 200 m. Nevertheless, the receiver was able to keep tracking satellites in the whole process. The receiver came back to normal soon after the jamming signal stopped (Fig. 13.5).
Fig. 13.5 
Curve variation of pseudo-range positioning error in the interference at L2 frequency

3.2.2 Analysis
-
The quality of L2 carrier signal deteriorated rapidly, the variation of its C/N0 showed an evident trend in the interval [−85 dBm, −72 dBm]; while L1 carrier signal was not affected from beginning to end (Fig. 13.6). The standard deviations were basically consistent with the C/N0 value.
Fig. 13.6 
Curve variation of carrier to noise ratio (C/N0) of L1 carrier and L2 carrier in the interference at L2 frequency
-
As the density of jamming signal continuously increased, the value of C/N0 and standard deviations of L2 signal became larger simultaneously (Fig. 13.7).
Fig. 13.7 
Curve variation of pseudo-range measurement standard deviation of L1 carrier and L2 carrier in the interference at L2 frequency


Dual-frequency receivers correct pseudo-range measurement error by using the following mathematical model [8]:
ρ0 for the real distance from satellite to the rover. ρ f1 and ρ f2 for pseudo-range measurement value of L1 and L2 carrier. δρf1 and δρf2 for pseudo-range measurement deviation of L1 and L2 carrier. f1 and f2 for the frequency of L1 and L2 carrier.
In the interference at L2 frequency, pseudo-range measurement by L1 signal was not affected, ρf1 and δρf1 were not affected by interference, so the loss of pseudo-range measurement accuracy was due to the variation of δρf2 in the interference at L2 frequency.
3.2.3 Pseudo-range Differential Measurement
After data processing, the error was eliminated with the correction given by the reference, while C/N0 of L1 carrier was not affected by the interference, its corresponding observations were normal, error can be eliminated in the process of differential, and therefore the measurement accuracy was actually improved. The conclusion is that we can get reliable measurement results by using pseudo-range differential in the case of less demanding precision (Fig. 13.8).

Curve variation of pseudo-range differential measurement error in the interference at L2 frequency
4 The Verification of the Phase Differential Scheme on Error Elimination in Interference
There are two types of differential positioning algorithms: pseudo-range and carrier phase. Under the conditions of short baseline, the results based on the double difference of the carrier phase are two grades higher than those based on pseudo-range differential, therefore the carrier phase differential scheme plays a dominant role in higher accuracy applications.
On the analysis hereinabove, the influence of interference is to increase the internal noise, and to enlarge measurement error; however the error caused by thermal noise in phase-locked loop is much smaller than that in the code tracking loop. Thus error caused in the interference can be eliminated based on the double difference of the carrier phase.
4.1 Carrier Phase Differential Measurement in the Interference at L1 Frequency
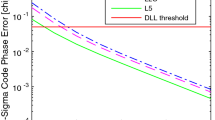
The variation of phase differential measurement showed that when jamming power was less than −86 dBm, the position derivation was within 5 cm. As the intensity of interference increased, satellites which can be observed by the rover reduced, and precision of measurement deteriorated (Fig. 13.9). It is concluded that the quality of the differential positioning solution generally decreases with the number of satellites which can be simultaneously viewed by both the reference and remote station receivers. As well, the quality of the positioning solution decreases if the distribution of satellites in the sky is not favorable.

Curve variation of carrier phase differential error in the interference at L1 frequency (left) and number of satellites participated in differential (right)
4.2 Carrier Phase Differential Measurement in the Interference at L2 Frequency
By Using carrier phase scheme, the error caused in interference was eliminated effectively, the overall position deviation kept within 3 cm in interval [−85 dBm, −72 dBm]. As the intensity of interference increased, there appeared several outliers, who can be identified through comparison and statistic. Therefore the phase differential scheme is helpful to improve the accuracy in interference (Fig. 13.10).

Curve variation of carrier phase differential error in the interference at L2 frequency
5 Conclusion
Test showed that when the interference is at two working frequencies of dual-frequency GPS receivers, it may affect the performance of receivers, make the noise of signal, which was amplified after received, increased, lower the accuracy of delay lock loops (DLL) and Phrase Locked Loops (PLL).
When the L1 carrier was jammed, the carrier to noise ratio (C/N0) of both L1 and L2 carrier signals declined simultaneously, the deviation of pseudo-range measurement for satellites increased, and the number of satellite viewed decreased, the accuracy of pseudo-range positioning and pseudo-range differential measurement would be affected eventually. By the carrier phase differential scheme, the impact of RFI was eliminated for a certain extent; yet, the reduction of viewed satellites would lead to the loss of measurement accuracy.
In the interference at L2 frequency, the receiver was able to keep tracking L1 signals, its pseudo-range differential measurement results were not influenced, however the pseudo-range pointing error increased obviously. With the help of carrier phase differential algorithms, we can eliminate error in the interference at L2 carrier frequency.
In practical application, it is recommended that the monitoring of RF signals in GNSS frequency domain should be enhanced, and frequency protection in application area be implemented if possible. Measurement in the complex electromagnetic environment should be avoided; or anti-interference means be adopted if required in jamming. In interference environment, make sure enough observation data was stored, and process data by using DGPS carrier phase differential approach to acquire desirable measurement results.
References
Tan SS (2010) The engineering of satellite navigation and positioning. National Defense Industry Press, Beijing
Su JJ, Li ZH (2002) Study of deliberate interference on GPS. Space Electron Coun 4:17–20
Feng Q, Lu B, Chang Zhu et al (2009) Study on the jamming frequency characteristics to GPS receiver. Space Electron Coun 25(3):4–6
Zhou KF, Yang Y et al (2005) Influence of jamming to pseudo-range measurement precision of GPS receiver. Electron Coun Tech 20(3):25–28
Zhou KF, Zhou XR, Yu JH (2006) Analysis of DLL/PLL of GPS receiver and its anti-jamming capability. Electron War Tech 21(2):36–39
Jiao X et al (2003) Effectiveness evaluation of the implementation of the GPS receiver to suppress interference. Space Electron Coun 3:11–14
Dou Y, Zhang WM, Chen J (2006) Analysis of Anti-interference performance of GPS receiver. Ordnance Ind Autom 25(11):50–52
Elliott D (2012) Understanding GPS: principles and applications. Publishing house of Electronic Industry, Beijing
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Li, F., Huang, H., Yang, H., Liu, H., Liu, M., Jiao, H. (2014). Test and Analysis of Interference Effects on Dual Frequency GNSS Receiver. In: Sun, J., Jiao, W., Wu, H., Lu, M. (eds) China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume I. Lecture Notes in Electrical Engineering, vol 303. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-54737-9_13
Download citation
DOI: https://doi.org/10.1007/978-3-642-54737-9_13
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-54736-2
Online ISBN: 978-3-642-54737-9
eBook Packages: EngineeringEngineering (R0)