
Abstract
Tensors provide a mathematical language for the description of many physical phenomena. They appear everywhere where the dependence of multiple vector fields is approximated as linear. Due to this generality they occur in various application areas, either as result or intermediate product of simulations. As different as these applications, is the physical meaning and relevance of particular mathematical properties. In this context, domain specific tensor invariants that describe the entities of interest play a crucial role. Due to their importance, we propose to build any tensor visualization upon a set of carefully chosen tensor invariants. In this chapter we focus on glyph-based representations, which still belong to the most frequently used tensor visualization methods. For the effectiveness of such visualizations the right choice of glyphs is essential. This chapter summarizes some common glyphs, mostly with origin in mechanical engineering, and link their interpretation to specific tensor invariants.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
As multilinear mappings, tensors are an important tool in many physical and engineering disciplines. They appear everywhere, where a linear correspondence between vectorial entities is assumed. Thus, they play a large role for many simulations of physical phenomena either as the result or as an intermediate product. For an introduction to and an overview over recent work concerning the visualization of tensor fields we refer to [20]. Concerning the analysis of tensors, practical questions are, in general, related to a set of specific tensor invariants that describe key aspects of the application. Visualizations that build on these sets of invariants are close to the everyday language of engineers and thus capable of supporting the data analysis in an intuitive way. Central to our work is the finding that tensor visualization methods can be efficiently designed and parametrized by an appropriate choice of invariants.
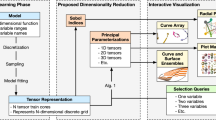
Due to its high information content, it is difficult to visualize the whole tensor information in a continuous way. Therefore tensor field visualization is always a compromise between a continuous, global representation of partial information or a discrete, local representation of the entire information. Local methods depict single tensors sampled at discrete positions across the field, where geometric objects (glyphs) are used to encode tensor properties in terms of shape, color and orientation. In this chapter we focus on such local glyph-based visualizations. In order to provide easy-to-read glyphs, it is crucial to decide, what information to choose, how to map the information onto glyph parameters [23] and where to place the glyph (see also Fig. 1). The goal of this chapter is to give an overview of commonly used glyphs in different mechanics applications and put them into context with relevant tensor invariants whenever possible. We also include some important sets of invariants, for which there are no appropriate glyphs encoding them directly yet.

Based on applications and their questions, meaningful invariant sets are extracted. Then selected sets are mapped to geometric shapes, which depict the tensor. Mathematically, the most efficient sets are complete and orthogonal. For the design of glyphs, however, other sets can be preferable
2 Basics and Notations
We restrict our considerations to second-order tensors given in three-dimensional space. A second-order tensor T is defined as a bilinear function from two copies of a vector space V into the space of real numbers, \(\mathbf{T}: V \otimes V \rightarrow \mathbb{R}\). Another but equivalent perspective defines a tensor T as linear operator that maps every vector onto a vector, i.e. a map from vector space V onto itself, T: V → V. Using a specific basis (e 1, e 2, e 3) of the vector space V, T can be represented as matrix. A tensor is uniquely determined by its 3 eigenvalues (principal values) λ i and corresponding eigenvectors (principal directions) e i . The eigenvalues are defined as the roots of the characteristic polynomial \(\det (\mathbf{T} -\lambda \mathbf{I}) = 0\).
Considering different application areas, tensors exhibit specific properties that have an impact on the choice of an appropriate visualization method. In the following, we summarize the most important tensor properties.
- Symmetry :
-
A tensor is called symmetric if its matrix representation is symmetric, this is m ij = m ji for all i, j. For symmetric tensors the eigenvalues are real and the eigenvectors mutually orthogonal. With respect to the basis spanned by the eigenvectors, the tensor matrix is diagonal. Physically, the eigenvectors describe the directions of extremal variations of the quantity that is encoded by the tensor. The sign of the eigenvalues often has a distinguished physical meaning.
- Definiteness :
-
We distinguish between positive (semi-) definite, negative (semi-) definite and indefinite tensors. A tensor is positive definite if the characteristic invariants of T are all positive, i.e. all eigenvalues of T are positive. It is positive semi-definite if all eigenvalues are larger than or equal to zero. The definition for negative (semi-) definite tensors is analogue. If the tensor’s eigenvalues are positive as well as negative, it is called indefinite.
- Traceless :
-
Considering the tensor T, represented by a matrix \(M \in \mathbb{R}^{3\times 3}\), the trace is defined as the sum of its diagonal components \(\mathit{tr}(M) =\sum _{ i=1}^{3}m_{\mathit{ii}}\). Tensors with trace zero are called traceless.
- Decompositions :
-
A decomposition into an isotropic and an anisotropic part is useful for many applications. Thereby, one has to distinguish the different classes of tensors: Positive-definite tensors with a character similar to deformation separate multiplicatively. This decomposition is also called dilation-distortion or volumetric-isochoric \(\mathbf{T} = \mathbf{T}^{\mathit{dil}} \cdot \mathbf{T}^{\mathit{dist}}\). The dilatation part is related to volume changes. It is given as \(\mathbf{T}^{\mathit{dil}}\! = J^{1/3}\mathbf{I}\), where J = det(T). The distortional or isochoric part accounts for shape changes given by \(\mathbf{T}^{\mathit{dist}}\! = J^{-1/3}\mathbf{T}\). Indefinite tensors as, e.g., natural strain or stress, with a deformation generating character, separate additively \(\mathbf{T} = \mathbf{T}^{\mathit{dev}}\! + \mathbf{T}^{\mathit{iso}}\). Where \(\mathbf{T}^{\mathit{dev}}\! = \mathbf{T}\! -\!\frac{1} {3}\mbox{ tr}(\mathbf{T})\:\mathbf{I}\) is called anisotropic part or deviator and \(\mathbf{T}^{\mathit{iso}}\! = \frac{1} {3}\mbox{ tr}(\mathbf{T})\:\mathbf{I}\) isotropic part. From a physical point of view, the isotropic part T iso represents a direction-independent transformation (e.g., a uniform scaling or uniform pressure) and the deviatoric part T dev represents the distortion. In context of stress, the deviatoric part is often analyzed to identify material failure.
3 Tensors in Mechanical Engineering
Among the most commonly used tensors of second order in mechanical engineering one can roughly distinguish three different classes. The first class are tensors that describe a change of a state, e.g., related to deformations; the second class are tensors generating a change of state, related to forces; the third class approximates distributions, e.g. of orientations. In the following we introduce some of the most relevant tensors in their physical context. A comprehensive introduction to this topic can be found in [6].
- Deformation gradient tensor :
-
Continuum mechanics deals with the analysis of deformable bodies. The deformation is described by the deformation gradient tensor F. It is defined as the gradient of displacements of material points. Since no cell inversions are allowed inside the material, the tensor is invertible and has a positive determinant. It quantifies shape changes and material rotation and, thus, is not symmetric. If (x 1, x 2, x 3) are the original coordinates and (X 1, X 2, X 3) the corresponding coordinates after deformation it is defined as \(\mathbf{F} = \left (\partial X_{i}/\partial x_{j}\right )\).
- Strain tensor :
-
The strain tensor can be derived from the deformation gradient tensor. Compared to the deformation gradient tensor it loses the information about rotation. It expresses the relative length and orientation changes during deformation. It is symmetric and indefinite. There are different ways to define strain explicitly. A common definition with respect to the original reference frame is given by \(\mathbf{E} = \frac{1} {k}((\mathbf{F} \cdot \mathbf{F}^{T})^{k} -\mathbf{I})\) with k ∈ N. F T is the matrix transposed to F and “⋅ ” the standard matrix multiplication. For k = 2 this is the Lagrangian strain, for k → 0 it becomes the natural strain. All of these strain definitions are equivalent if the deformations are infinitesimal small.
- Stress tensors :
-
The stress tensor describes internal forces or stresses that act on a material within a deformable body as reaction to external forces (Fig. 2a). If forces are balanced and there is no rotation (which is, in general, fulfilled for infinitesimally small volume elements), the stress tensor is symmetric. The sign of the eigenvalues differentiates compressive or tensile forces, whereby, there is no unique sign convention. Stress has the dimension of pressure, its unit is force per area. Considering cutting planes with normal n through the material, the forces acting on these planes are given by the traction vector t (Fig. 2b).
$$\displaystyle{ \mathbf{t} = \mathbf{T}\cdot \mathbf{n} = \left (\begin{array}{@{}ccc@{}} \sigma _{\mathit{xx}} & \tau _{\mathit{xy}} & \tau _{\mathit{xz}}\\ \tau _{ \mathit{yx}} & \sigma _{\mathit{yy}} & \tau _{\mathit{yz}}\\ \tau _{\mathit{zx } } & \tau _{\mathit{zy } } & \sigma _{\mathit{zz } } \end{array} \right )\cdot \mathbf{n} =\tau _{n}+\sigma _{n}. }$$(1)The traction vector can be decomposed into a part normal to the cutting plane \(\sigma _{n} = (\mathbf{n}^{T} \cdot T \cdot \mathbf{n}) \cdot \mathbf{n}\) representing normal forces (compressive or tensile), and a tangential part τ n representing shear forces. Cutting planes exhibiting maximum shear stress (difference of the major and minor eigenvalue), are of special interest. The directions as well as the magnitude of the maximum shear are important for many failure models. Depending on the considered material, the magnitude of the tensor’s deviator (Sect. 2) may be an additional indicator for the risk of failure. Together, stress and strain specify the behavior of a continuous medium under load, which allows to deduce information about a workpiece’s stability.
Fig. 2 
Stress tensor. External forces f are applied to a deformable body (a). The reacting forces are described by a three-dimensional stress tensor. The tensor is composed of three normal stresses σ and three shear stresses τ. (b) Given a surface normal n of some cutting plane, the stress tensor maps n to the traction vector t, which describes the forces that act on this plane (normal and shear forces)

4 Tensor Invariants
Tensor invariants are defined as scalar quantities that do not change under orthogonal coordinate transformation. In general, any scalar function of invariants will be an invariant itself. The most obvious example is the set of eigenvalues. Other common invariants are the determinant and trace or any other function that depends only on the eigenvalues.
4.1 Shape Space
The six degrees of freedom of a symmetric tensor are represented by three direction-related entities determining the principal directions and three eigenvalues. Following [10], we use the term shape space for the vector space spanned by the eigenvalues. A point in shape space is uniquely determined by the three eigenvalues. Equivalently, three coordinates according to any other reference frame (RF) of the shape-space can be used. We call these coordinates shape descriptors. Since a permutation of the eigenvalues describes the same tensor, it is sufficient to restrict the analysis to the ordered subspace where λ 1 ≥ λ 2 ≥ λ 3. See [1] for a closer discussion on the ordered eigenvalue space. Sometimes it is appropriate to consider further reductions of this space, e.g., if we deal with specific tensor properties, have incomplete information, or only partial interest. Depending on the property this either leads to a dimension reduction (e.g., subspace of traceless tensors) or to the definition of a subspace having the dimension of the full shape space (e.g., subset of positive-definite tensors).
An appropriate choice of RF is essential for the analysis and the understanding of a tensor in a given context. Thereby each RF provides its own view of the tensor. Characteristic tensor invariants can provide guidance for the RF specification. Considering a set of invariants as basis for the analysis of strain tensors has been proposed in the work of Criscione et al. [7]. For the analysis of diffusion tensor data, this concept has been transferred to the visualization of positive definite tensors [1, 10].
4.2 Basis Defined by Tensor Invariants
An invariant I = f(λ 1, λ 2, λ 3) defines a family of surfaces in shape space, which are specified by a certain scalar value for I. Each set of three invariants {I 1, I 2, I 3}, which are independent, i.e., \(\nabla _{\lambda }I_{1}(\nabla _{\lambda }I_{2} \times \nabla _{\lambda }I_{3})\neq 0\) with \(\nabla _{\lambda } = (\partial /\partial \lambda _{1},\partial /\partial \lambda _{2},\partial /\partial \lambda _{3})\), defines a local basis of the shape space, see Fig. 3a. A set of invariants qualifies as global basis if I i is defined everywhere and ∇ λ I i ≠ 0 for i = 1, 2, 3. From a mathematical point, of view a desirable property is orthogonality of the tensor invariants \(\nabla _{\lambda }I_{i} \cdot \nabla _{\lambda }I_{j} = 0\), for all i, j ∈ { 1, 2, 3}. In practice, however, the physical significance of tensor invariants can force us to use invariant sets that are not orthogonal. By choosing a certain basis for shape space via a set of invariants, we yield shape descriptors that provide a specific perspective onto the data.

(a) Each global invariant can be used to define 2-dimensional subspaces of the shape space. A set of three independent invariants defines a local reference frame. (b) Example for the parameterization of the (ordered) shape space using invariants, which are relevant for failure analysis based on the Coulomb-Mohr failure criterion
Common reference frames for the shape space can be classified according to type, scaling, and orientation. The most important (orthogonal) types are:
-
Cartesian: Full shape space.
-
Spherical: Full shape space excluding the origin, where \(\lambda _{1} =\lambda _{2} =\lambda _{3} = 0\).
-
Cylindrical: Full shape space excluding the symmetry axis of the cylinder.
The fundamental difference of these types lies in the nature of their coordinate types, meaning absolute (with units) respective relative (unit-free) coordinates. Relative coordinates or normalized quantities correspond to angular coordinates. They are not defined if the norm is equal to zero and, thus, are unstable for tensors with small norm. As a consequence, spherical and cylindrical coordinate systems are not optimal for indefinite tensors.
5 Glyphs in Tensor Visualization
Glyphs are iconic figures that encode multivariate information in terms of shape, size, color, transparency and texture. They are widely used to depict tensors. Schultz et al. [27] recently formulated the following application areas for glyphs:
-
Debugging: For example, during design of new visualization methods.
-
Evaluation of data quality: For example, when tensors appear as intermediate product during simulations.
-
Visualization overview: For example, to get a first clue of the data and reveal patterns in it.
We would like to add probing to this list.
-
Probing: Complex glyph geometries can be used for the detailed analysis of single tensors.
For these applications we can distinguish between dense and single-glyph visualizations (see Fig. 4). For dense glyph visualizations less complex geometries should be used. Furthermore, normalization and perceptional issues have to be considered [17, 27]. Besides the choice of an intuitive glyph the design a good placement is essential [11, 19, 21]. In the following, we concentrate on the visualization of single tensors. In order to provide easy-to-read glyphs, it is crucial to decide, which information to chose and how to map the information onto glyph parameters [23].

If the focus is on a specific location within the dataset, we can use complex geometries that encode as much information as possible (a). For a dense more continuous visualization, glyphs with simpler geometry and better perceptional properties (here ellipses) are better suited (b)
- Which information to chose :
-
From a purely theoretical perspective, a three-dimensional tensor is perfectly represented by an ellipsoid scaled by its eigenvalues and oriented along its eigenvectors. But the ellipsoid is not capable to meet the diverse requirements imposed by the various application fields. Many other glyph types have been presented, each with its strengths and limitations, see e.g. [13, 22, 27]. To succeed in designing glyphs that will be accepted by the domain scientist, it is important to link the question of “which information to use”, to the choice of appropriate shape descriptors and directions. Thereby, application-specific preferences should be placed before purely theoretical considerations.
- How to map the information onto geometry :
-
In general for this question there is no unique answer. Schultz et al. [27] have proposed the following general design guidelines for choosing geometries as glyphs:
-
Symmetry preservation: Glyphs exhibit the symmetries as the underlying tensor.
-
Continuity and disambiguity: Glyph geometries look similar for similar tensors; whereas different tensors should result in distinguishable glyphs.
-
Scale invariance: Uniform scaling of the tensor by changing its norm results in a uniform scaling of the glyph geometry.
-
Invariance under eigenplane projection: Projection of a tensor to a plane spanned by two eigenvectors results in a corresponding projection of the glyph.
The first two rules are very general, whereas the third rule (scale invariance) depends on the application. Especially if the tensor’s deviator is of interest, glyphs that are translation invariant may be more appropriate. Therefore, we suggest to replace this rule by “invariance according to relevant shape descriptors”.
-
6 Invariant Sets and Their Glyphs
Most common shape descriptors can be assigned to one of the coordinate-types and reference frames presented above, which represent complete, orthogonal frames. However, there are also invariant sets with high practical relevance, which are neither orthogonal nor complete. This section represents a collection of frequently used invariant sets and glyphs and their relation in different context.
6.1 Eigenvalues
- Ellipsoid :
-
The most obvious invariant set are the three eigenvalues themselves. Together with the three eigenvectors they are often represented using ellipsoids. In context with stress tensors, they are also called Lame’s stress ellipsoids or PNS-Glyph. In this context, the ellipsoid has an immediate physical meaning, because it displays all possible traction vectors (Eq. 1). It can be obtained by applying the tensor to the unit sphere \(\{T \cdot n\vert n \in \mathbb{R}^{3},\|n\| = 1\}\). With respect to the principal frame of reference it can also be defined as implicit surface by
$$\displaystyle{ \frac{x_{1}^{2}} {\lambda _{1}^{2}} + \frac{x_{2}^{2}} {\lambda _{2}^{2}} + \frac{x_{3}^{2}} {\lambda _{3}^{2}} = 1. }$$(2)Even though the ellipsoid represents positive-definite tensors completely, it is hard to derive any information besides the eigenvalues and eigendirections from the glyph. In addition for indefinite tensors the information about the sign of the eigenvalues is lost, see Fig. 5a. A further disadvantage of ellipsoids is visual ambiguity. Although they are of different shape, they may result in the same image after rendering, see discussion in [17].
Fig. 5 
Ellipse-glyphs for an indefinite 2D symmetric second-order tensor: (a) Applying a tensor to a unit circle results in the standard ellipse-definition, which cannot distinguish the sign of the eigenvalues. (b) Interpretation of the tensor as generator of a deformation of a unit sphere. The resulting glyph is the deformation ellipsoid
- Haber Glyph :
-
There are a variety of other glyphs focusing on the representation of the eigenvalues and principal directions. One example is the Haber glyph [12]. It clearly emphasizes a particular direction of interest, usually the one corresponding to the major eigenvalue. The two remaining directions are mapped to the shape of an elliptical disk with the size being controlled by the corresponding eigenvalues (see Fig. 6a).
Fig. 6 
(a) The Haber glyph, designed for stress tensors, emphasizes direction and magnitude of the major stress. (b) The major axes of the Westin glyph are aligned with the tensor’s eigenvectors, emphasizing the major eigendirection. It displays the tensor invariants: linearity, planarity and isotropy. (c) Beachballs are a common glyph used in for earthquake visualizations. It is an example for a glyph that focuses on the representation of directions and neglects the eigenvalues
- Deformation Glyph :
-
Another glyph with the shape of an ellipsoid is the deformation ellipsoid. This glyph is capable to represent positive as well as negative eigenvalues. It results from a deformation of the unit sphere due to the tensor, see Fig. 5b. This representation reflects the physical meaning of tensors belonging to the first class tensors, generating a change of state (Sect. 3). It can be obtained by applying the tensor to the unit sphere \(\{(1 + F(T)) \cdot n\vert n \in \mathbb{R}^{3},\|n\| = 1\}\). Thereby, F is an appropriate mapping technique, that is monotone in the eigenvalues and preserves their sign [15].


6.2 Principal Invariants and Trace Invariants
The principal or characteristic invariants can be found in every textbook, since they appear as coefficients of the characteristic polynomial (Sect. 2). However, they neither exhibit strong physical relevance nor nice mathematical properties. For second-order tensors, they are I 1 = tr(T), \(I_{2} = 1/2(\mathit{tr}(\mathbf{T})^{2} -\mathit{tr}^{\prime}(\mathbf{T}^{2}))\), and I 3 = det(T). Another set of invariants, which is related and also often considered in continuum mechanics, is the trace invariants defined as I = tr(T), II = tr(T 2), and III = tr(T 3). We are not aware of any common glyph that represents these invariants.
6.3 Tensor-Norm and Shape
To define scale invariant glyphs, the tensor norm is an appropriate invariant. It is often complemented by different anisotropy measures. Note, that one has to be careful when using the norm as central invariant when dealing with indefinite tensors. In general, the corresponding invariant set is not defined for the zero tensor and is often not continuously extendable to the complete shape space.
A set of complementing invariants differentiate the tensor in terms of isotropic, linear or planar anisotropic behavior [29].
These values are unit-free measures and scale invariant. They can take values from 0 to 1 and sum up to one. Thus, they are not independent and can be interpreted as barycentric coordinates, see Fig. 7. This set is especially popular for the analysis of diffusion tensors. For diffusion tensors these coordinates represent central physiological properties, which help to find regions of interest. For negative-definite tensors they are not suitable, since positive and negative eigenvalues cannot be distinguished. Different glyphs have been proposed on the basis of this set of invariants. Often, they are normalized in size and, thus, do not represent the entire tensor information.
- Westin glyph :
-
This glyph directly displays these shape measures using a composite shape, whose linear, planar, and spherical components are scaled accordingly [28]. Its major axes are aligned with the tensor’s eigenvectors.
Fig. 7 
Superquadrics (a) combine cylinders, cuboids and ellipsoids in a continuum that spans the entire range normalized tensor shapes [17]. The three extremes of linear, planar and spherical shape build the corners of a triangular barycentric space. Tensor splats (b) build on the same invariants equipping the ellipsoids with a texturing to enhance linearity and assigning opacity values to isotropy, assuming that isotropic tensor are of less interest (Image courtesy to Benger [3])
- Superquadrics :
-
Superquadrics [2] were introduced as an extension of quadrics in order to produce a continuum of new forms by simple parameterization. Kindlmann [17] uses these superquadrics to combine base geometries in the barycentric space, spanned by the three anisotropy measures defined in Eq. 3. The base geometries for perfectly planar (a flat disk), perfectly linear (a thin cylinder) and isotropic tensors (a sphere). Recently, the superquadric shape space has been extended for indefinite tensors [27].
- Tensor Splats :
-
Tensor splats build on the same invariants. The basic shape is an ellipsoid, which is equipped with a texture to enhance linearity. In addition opacity is assigned to isotropy, assuming that isotropic tensors are of less interest. The idea of tensor splats [3, 4] is to splat the glyphs onto the image plane, where they are composited in front-to-back order. For example, tensor splats can be used for DTI: Isotropic tensors are mapped to low opacity values and anisotropic tensors to high opacity values, resulting in reduced visual clutter and an emphasis on interesting regions.
- Anisotropy and mode :
-
Two sets of orthogonal reference frames have been proposed and discussed in [10, 18]. The cylindrical system is an adoption of the natural strain invariants [7] into the language of DTI. It also builds on the decomposition of the tensor into its isotropic and anisotropic part. The spherical basis uses the tensor’s norm (magnitude of isotropy) as radial coordinate, mode as azimuth angle and fractional anisotropy (FA, magnitude of anisotropy) as polar angle.
$$\displaystyle{ \begin{array}{lll} \mbox{ Frobenius norm} &\qquad R_{1} =\| \mathbf{T}\| & \in [0,\infty ) \\ \mbox{ Fractional anisotropy}&\qquad R_{2} = \sqrt{\frac{3} {2}}\:\:\frac{\|\mathbf{T}^{\mathit{dev}}\|} {\|\mathbf{T}\|} & \in [0,1] \\ \mbox{ Mode} &\qquad R_{3} =\det (\mathbf{T}^{\mathit{dev}}/\|\mathbf{T}^{\mathit{dev}}\|)& \in [-1,1]\end{array} }$$(4)T dev is the deviator of T and \(\|.\|\) is the Frobenius norm. In this context, mode is used to distinguish the three basis shapes of diffusion tensors (Eq. 3): linear (mode(T) = 1), planar (\(\mbox{ mode}(\mathbf{T}) = -1\)) and spherical (mode(T) = 0). These sets have the nice property of providing an orthogonal basis of the positive definite shape-space. To our knowledge, there is no common glyph directly encoding theses measures.
- Traceless tensors :
-
For symmetric traceless tensors a special variant of superquadric glyphs have been introduced in [16] to visualize the orientation of liquid crystals.

6.4 Invariant Sets for Stress Tensors
Stability and failure analysis are in the center of many questions related to stress tensors. Depending on the respective materials, considering elastic or plastic deformation, different failure models exist. For each failure model there is a specific set of invariants corresponding to the material properties. Stress-glyphs that are successfully used by domain-experts often encode exactly these sets. In the following, we give an overview over the most frequently used glyphs in this context.
- Mohr’s circle :
-
Many failure models build on the analysis of the maximum shear stress. It represents the maximum shear forces that occur on any cutting plane (Eq. 1). Shear forces are especially important when analyzing the failure of ductile materials. An example is the Coulomb-Mohr failure criterion. Its most important invariants are [24]:
$$\displaystyle{ \begin{array}{lll} \mbox{ Maximum shear stress}&\qquad \tau = \frac{\lambda _{1}-\lambda _{3}} {2} & \qquad \in [0,\infty ) \\ \mbox{ Mohr center} &\qquad c = \frac{\lambda _{1}+\lambda _{3}} {2} & \qquad \in (-\infty,\infty ) \\ \mbox{ Shape factor} &\qquad R = \frac{\lambda _{1}-\lambda _{2}} {\lambda _{1}-\lambda _{3}} & \qquad \in [0,1]\end{array} }$$(5)
This set does not define an orthogonal coordinate frame but it represents important physical quantities. τ is an anisotropy measure, which has the unit of pressure. R is a relative entity and is not defined for isotropic tensors.
A typical glyph that encodes these invariants is Mohr’s circle, which can be found in many textbooks of continuum mechanics. For visualization purposes, it has been used for stress tensors [8] as well as for diffusion tensors [5]. Mohr’s circle is a two-dimensional representation of a stress tensor, which consists of three circles, see Fig. 8. It displays all possible (σ n , τ n )-combinations of normal σ n and shear stresses τ n . The radius of the largest circle displays the maximum possible shear stress. Circles that degenerate to single points represent isotropic pressure.

Representation of the deformation ellipsoid (first row) of the deviator in comparison with Mohr’s circle (second row). The horizontal axis depicts the normal stress and the vertical axis the shear stress. The blue shaded area represents all possible combinations of normal and shear forces for a given cutting plane. Each point within this region then corresponds to one orientation of the plane’s normal. Adding a uniform pressure changes the position of Mohr’s circle on the horizontal axis. Its shape remains unchanged (translation-invariance)
Mohr’s circle does not encode any directional information. The glyph is translation invariant: when adding a constant multiple of the unit tensor the shape does not change. It just moves the Mohr’s center along the τ n -axis.
Note that some failure models do not consider isotropic pressure, then it is sufficient to display the Mohr’s circle without specifying its center. The remaining two-dimensional shape space only considers the tensor’s deviator, see Fig. 9.

Different glyphs only representing the shape factor (Eq. 5). The columns use from left to right: HWY + Reynolds, Reynolds, HWY, deformation, Mohr Glyphs. The Reynolds glyphs show directions of maximum normal forces, while the HWY glyphs highlight directions of maximum shear. For the values of R = 0 and R = 1, these directions span a cone. For all other values of R there are exactly two distinguished directions, which exhibit maximum shear
- Beachball :
-
In contrast, beach balls focus on directional information, which have an immediate physical interpretation, see Fig. 6c. They are used in geology to visualize the moment tensor describing sources of earthquakes. This application is an example where generally the entire tensor information is not available. It is often not possible to extract the part related to volume changes from the measurement data. For the definition of the beach ball it is assumed that the intermediate eigenvalue equals zero and the major and minor eigenvalue sum up to zero. The directions of interest are the tensional (positive) T- and compressional (negative) P-axis, which are represented by the orientation of the beach ball.
- Reynolds glyph :
-
The Reynolds glyph highlights the distribution of normal stresses σ n depending on the normal of the cutting plane (Eq. 1). This distribution is not given by one specific invariant. The basic shape of the glyph allows to distinguish definite and indefinite tensors [22, 25] (Fig. 10, second row). The glyph is defined as the set of all normal directions scaled by the magnitude of the normal stresses in that direction \(\{\sigma _{n} \cdot \mathbf{n}\vert \mathbf{n} \in \mathbb{R}^{3},\|\mathbf{n}\| = 1\}\). The principal directions can be depicted as directions of maximum respective minimum extension of the glyph.
Fig. 10 
Overview of basic stress glyph shapes. From top to bottom: ellipsoid (Lamé’s stress ellipsoid), Reynold’s glyph displaying the normal forces, HWY glyph displaying the magnitude of shear forces, and quadric surfaces. Whenever it is meaningful to distinguish compressive (red) and tensile (green) force they are colored respectively. The right column illustrates the interpretation of the various glyph types for the two-dimensional case
- HWY glyph :
-
The HWY glyph focuses on the magnitude of shear stress and can be interpreted as a counterpart to the Reynolds glyph [13]. Its displays all possible shear forces τ n . The glyph is defined as the set of all normal directions scaled by the magnitude of the shear stresses acting in the plane perpendicular to the normal n \(\{\tau _{n} \cdot \mathbf{n}\vert \mathbf{n} \in \mathbb{R}^{3},\|\mathbf{n}\| = 1\}\) (Fig. 10, third row). The direction of the shear stress in that plane is not represented by the HWY glyph.
- Quadric surface :
-
A quadric surface represents the tensor completely. It is defined as \(\mathbf{T}(\underline{x},\underline{x}) = \pm 1\), which is in terms of the eigenvalues \(\lambda _{1}x^{2} +\lambda _{2}y^{2} +\lambda _{3}z^{2} \pm 1 = 0,\) (Fig. 10, forth row). It constitutes a surface of constant distance to the center and, thus, provides a natural visualization of the metric tensor. Quadric surfaces can also be used to depict the force directions on a cutting plane and to distinguish between positive and negative eigenvalues. However, they are more complex and, hence, more difficult to comprehend. Note that the resulting surfaces are not bounded for the case of indefinite tensors, which limits their applicability. In context with the curvature tensor of a surface there is a close correspondence to the Dupin indicatrix characterizing the local shape of a surface. It is defined as the intersection of the surface with a plane parallel to the tangent plane in a small distance away, see e.g. [9].

6.5 Invariant Set of the Natural Strain
A physically expressive cylindrical orthogonal set of invariants of the natural strain tensor was introduced by Criscione et al. [7]. The work aimed to simplify the constitutive equations, which relate stress and strain. The invariant set that is presented in their work relates to the decomposition of the tensor into its isotropic and anisotropic part. The resulting invariants then are the norm of the tensor’s isotropic part as Cartesian coordinate, the norm of the deviator (measure for the degree of anisotropy) as cylindrical radius and the type of distortion, introduced as mode, as azimuthal angle.
D dev is the deviator of T and \(\|.\|\) is the Frobenius norm. Here, mode can be interpreted as uniaxial extension for K 3 = 1, uniaxial contraction for \(K_{3} = -1\) and pure shear for K 3 = 0. It is not defined for K 2 = 0.
7 Summary
With this chapter we provide an overview of a collection of glyphs that are used to display tensors to convey domain-specific information. In many cases, these represent a distinguished set of tensor invariants. The relation between tensor invariants and glyphs can be helpful in both directions. If there are glyphs commonly used in an application, they can point to a set of invariants, which is of special interest. In a next step, these can be used as basis for other visualization methods. On the other hand, if one is given a set of invariants new glyphs could be designed around this set.
While this chapter is restricted to symmetric second-order tensors, there are also glyphs defined for higher-order tensors, see e.g. [14, 26]. A further interesting question would be the investigation of glyphs for asymmetric tensor fields.
References
Bahn, M.M.: Invariant and orthonormal scalar measures derived from magnetic resonance diffusion tensor imaging. J. Magn. Reson. 141(1), 68–77 (1999)
Barr, A.H.: Superquadrics and angle-preserving transformations. IEEE Comput. Graph. Appl. 1(1), 11–23 (1981)
Benger, W., Hege, H.-C.: Tensor splats. In: Proceedings of Visualization and Data Analysis, San Jose, pp. 151–162 (2004)
Bhalerao, A., Westin, C.-F.: Tensor splats: visualising tensor fields by texture mapped volume rendering. In: Proceedings of MICCAI’03, Montréal, pp. 294–901 (2003)
Bilgen, M., Narayana, P.A.: Mohr diagram interpretation of anisotropic diffusion indices in MRI. Magn. Reson. Imaging 21(5), 567–572 (2003)
Brannon, R.M.: Kinematics: the mathematics of deformation. http://www.mech.utah.edu/~brannon/public/Deformation.pdf (2008). Accessed 24 Feb 2014
Criscione, J.C., Humphrey, J.D., Douglas, A.S., Hunter, W.C.: An invariant basis for natural strain which yields orthogonal stress response terms in isotropic hyperelasticity. J. Mech. Phys. Solids 48, 2445–2465 (2000)
Crossno, P., Rogers, D.H., Brannon, R.M., Coblentz, D., Fredrich, J.T.: Visualization of geologic stress perturbations using Mohr diagrams. IEEE Trans. Vis. Comput. Graph. 11(5), 508–518 (2005)
DoCarmo, M.P.: Differential Geometry of Curves and Surfaces. Prentice Hall, Upper Saddle River (1976)
Ennis, D.B., Kindlmann, G.: Orthogonal tensor invariants and the analysis of diffusion tensor magnetic resonance images. Magn. Reson. Med. 55(1), 136–146 (2006)
Feng, L., Hotz, I., Hamann, B., Joy, K.: Anisotropic noise samples. IEEE Trans. Vis. Comput. Graph. 14(2), 342–354 (2008)
Haber, R.B.: Visualization techniques for engineering mechanics. Comput. Syst. Eng. 1(1), 37–50 (1990)
Hashash, Y.M.A., Yao, J.I.-C., Wotring, D.C.: Glyph and hyperstreamline representation of stress and strain tensors and material constitutive response. Int. J. Numer. Anal. Methods Geomech. 27(7), 603–626 (2003)
Hlawitschka, M., Scheuermann, G.: Hot-lines – tracking lines in higher order tensor fields. In: Proceedings of IEEE Visualization (Vis’05), Minneapolis, pp. 27–34 (2005)
Hotz, I., Feng, L., Hagen, H., Hamann, B., Jeremic, B., Joy, K.I.: Physically based methods for tensor field visualization. In: Proceedings of IEEE Visualization (Vis’04), Austin, pp. 123–130 (2004)
Jankun-Kelly, T., Mehta, K.: Superellipsoid-based, real symmetric traceless tensor glyphs motivated by nematic liquid crystal alignment visualizations. IEEE Trans. Vis. Comput. Graph. (Proceedings Visualization ’06) 12, 1197–1204 (2006)
Kindlmann, G.: Superquadric tensor glyphs. In: Proceeding of the Joint Eurographics – IEEE TCVG Symposium on Visualization, Konstanz, pp. 147–154 (2004)
Kindlmann, G., Ennis, D.B., Whitaker, R.T., Westin, C.-F.: Diffusion tensor analysis with invariant gradients and rotation tangents. IEEE Trans. Med. Imaging 26, 1483–1499 (2007)
Kindlmann, G., Westin, C.-F.: Diffusion tensor visualization with glyph packing. IEEE Trans. Vis. Comput. Graph. (Vis ’06) 12(5), 1329–1336 (2006)
Kratz, A., Auer, C., Stommel, M., Hotz, I.: Visualization and analysis of second-order tensors: moving beyond the symmetric positive-definite case. Comput. Graph. Forum – State of the Art Reports 32(1), 49–74 (2013)
Kratz, A., Baum, D., Hotz, I.: Anisotropic sampling of planar and two-manifold domains for texture generation and glyph distribution. Trans. Vis. Comput. Graph. (TVCG) 19, 1782–1794 (2013)
Kriz, R., Yaman, M., Harting, M., Ray, A.: Visualization of zeroth, second, fourth, higher order tensors, and invariance of tensor equations. Summer Research Project 2003, 2005. University Visualization and Animation Group, Virginia Tech, Blacksburg
Lie, A.E., Kehrer, J., Hauser, H.: Critical design and realization aspects of glyph-based 3d data visualization. In: Proceedings of the Spring Conference on Computer Graphics (SCCG ’09), Budmerice, pp. 27–34 (2009)
Lund, B.: Crustal stress studies using microearthquakes and boreholes. PhD thesis, Department of Earth Sciences, Uppsala University (2000)
Moore, J.G., Schorn, S.A., Moore, J.: Methods of classical mechanics applied to turbulence stresses in a tip leakage vortex. J. Turbonmachinery 118(4), 622–630 (1996)
Schultz, T., Kindlmann, G.: A maximum enhancing higher-order tensor glyph. Comput. Graph. Forum (EuroVis’10) 29(3), 1143–1152 (2010)
Schultz, T., Kindlmann, G.L.: Superquadric glyphs for symmetric second-order tensors. IEEE Trans. Vis. Comput. Graph. (Vis’10) 16(6), 1595–1604 (2010)
Westin, C.-F., Maier, S.E., Khidhir, B., Everett, P., Jolesz, F.A., Kikinis, R.: Image processing for diffusion tensor magnetic resonance imaging. In: Proceedings of MICCAI’99, Cambridge, pp. 441–452 (1999)
Westin, C.-F., Peled, S., Gudbjartsson, H., Kikinis, R., Jolesz, F.A.: Geometrical diffusion measures for MRI from tensor basis analysis. In: Proceedings of the International Society for Magnetic Resonance Medicine (ISMRM), Vancouver, pp. 1742 (1997)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Kratz, A., Auer, C., Hotz, I. (2014). Tensor Invariants and Glyph Design. In: Westin, CF., Vilanova, A., Burgeth, B. (eds) Visualization and Processing of Tensors and Higher Order Descriptors for Multi-Valued Data. Mathematics and Visualization. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-54301-2_2
Download citation
DOI: https://doi.org/10.1007/978-3-642-54301-2_2
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-54300-5
Online ISBN: 978-3-642-54301-2
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)