
Abstract
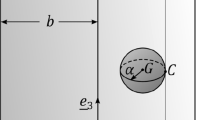
If a mechanical system with coordinates q = (q1...qn)t is subject to the unilateral constraint
then discontinuities can occur in the velocities (in contrast to systems with the classical bilateral constraint f (q,t) =0 which does not cause such discontinuities). For the velocity jumps algebraic equations are known (see refs.[1, 2]). When a system of differential equations of motion subject to the constraint (1) is solved numerically the usual procedure is as follows. First the impact time ti is determined iteratively. The numerical integration is then interrupted at t=ti and the velocity jumps are computed. With new initial conditions the numerical integration is then continued. The present paper describes a technique for computing highly accurate solutions without having to interrupt the numerical integration and without having to solve algebraic equations for velocity jumps. Any standard integration routine with stepsize control can be used.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others
References
Wittenburg, J., “Dynamics of Systems of Rigid Bodies”, BG Teubner (1977).
Baumgarte, J., “Analytische Mechanik der beschränkten Konfigurationsräume”, to appear.
Baumgarte, J., Ostermeyer, G.P., “Transformation der unabhängigen Variablen in einer verallgemeinerten Hamiltonschen Formulierung”, ZAMM 61, T16 - T18 (1981).
Ostermeyer, G.P., “Regularisation of Impulsive Motion, to appear.
Ostermeyer, G.P., “Mechanische Systeme mit beschränktem Konfigurationsraum”, Diss. TU Braunschweig (1983).
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1984 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ostermeyer, G.P. (1984). Numerical Integration of Systems with Unilateral Constraints. In: Haug, E.J. (eds) Computer Aided Analysis and Optimization of Mechanical System Dynamics. NATO ASI Series, vol 9. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-52465-3_18
Download citation
DOI: https://doi.org/10.1007/978-3-642-52465-3_18
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-52467-7
Online ISBN: 978-3-642-52465-3
eBook Packages: Springer Book Archive