
Abstract
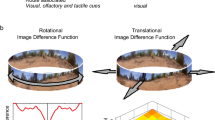
The ability of insects to visually navigate long routes to their nest has provided inspiration to engineers seeking to emulate their robust performance with limited resources [1-2]. Many models have been developed based on the elegant snapshot idea: remember what the world looks like from your goal and subsequently move to make your current view more like your memory [3]. In the majority of these models, a single view is stored at a goal location and acts as a form of visual attractor to that position (for review see [4]). Recently however, inspired by the behaviour of ants and the difficulties in extending traditional snapshot models to routes [5], we have proposed a new navigation model [6-7]. In this model, rather than using views to recall directions to the place that they were stored, views are used to recall the direction of facing or movement (identical for a forward-facing ant) at the place the view was stored. To navigate, the agent scans the world by rotating and thus actively finds the most familiar view, a behavior observed in Australian desert ants. Rather than recognise a place, the action to take at that place is specified by a familiar view.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Wehner, R.: Desert ant navigation: How miniature brains solve complex tasks. J. Comp. Physiol. A 189, 579–588 (2003)
Graham, P., Philippides, A.: Insect-Inspired Vision and Visually Guided Behavior. In: Bhushan, B., Winbigler, H.D. (eds.) Encyclopedia of Nanotechnology. Springer (2012)
Cartwright, B.A., Collett, T.S.: Landmark Learning in Bees - Experiments and Models. J. Comp. Physiol. A 151, 521–543 (1983)
Möller, R., Vardy, A.: Local visual homing by matched-filter descent in image distances. Biol. Cybern. 95, 413–430 (2006)
Smith, L., Philippides, A., Graham, P., Baddeley, B., Husbands, P.: Linked local navigation for visual route guidance. Adapt. Behav. 15, 257–271 (2007)
Baddeley, B., Graham, P., Philippides, A., Husbands, P.: Holistic visual encoding of antlike routes: Navigation without waypoints. Adapt. Behav. 19, 3–15 (2011)
Baddeley, B., Graham, P., Husbands, P., Philippides, A.: A Model of Ant Route Navigation driven by Scene Familiarity. PLoS Comput. Biol. 8(1), e1002336 (2012)
Graham, P., Philippides, A., Baddeley, B.: Animal cognition: Multi-modal interactions in ant learning. Curr. Biol. 20, R639–R640 (2010)
Wehner, R., Michel, B., Antonsen, P.: Visual navigation in insects: coupling of egocentric and geocentric information. J. Exp. Biol. 199, 129–140 (1996)
Wystrach, A., Mangan, M., Philippides, A., Graham, P.: Snapshots in ants? New interpretations of paradigmatic experiments. J. Exp. Biol. 216, 1766–1770 (2013)
Müller, M., Wehner, R.: Path integration provides a scaffold for landmark learning in desert ants. Curr. Biol. 20, 1368–1371 (2010)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Philippides, A., Dewar, A., Wystrach, A., Mangan, M., Graham, P. (2013). How Active Vision Facilitates Familiarity-Based Homing. In: Lepora, N.F., Mura, A., Krapp, H.G., Verschure, P.F.M.J., Prescott, T.J. (eds) Biomimetic and Biohybrid Systems. Living Machines 2013. Lecture Notes in Computer Science(), vol 8064. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-39802-5_56
Download citation
DOI: https://doi.org/10.1007/978-3-642-39802-5_56
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-39801-8
Online ISBN: 978-3-642-39802-5
eBook Packages: Computer ScienceComputer Science (R0)