
Abstract
The initial performance of the BeiDou single-epoch dual-frequency RTK is evaluated. The success rate and reliability of single-epoch dual-frequency ambiguity resolution (AR) by BeiDou or BeiDou/GPS are analyzed, which are also compared with those by GPS alone. The results show that the BeiDou-only dual-frequency RTK is already feasible, whose single-epoch AR performance and positioning accuracy are compared to those of GPS alone. Furthermore, the success rate and reliability of BeiDou/GPS single-epoch AR are improved when compared to GPS, in particular under high cut-off elevation situations. It is also observed that the improvement of positioning accuracy reach to 31 % for the very short baseline of 4.2 m and is 2.9 % for the short baseline of 8.2 km.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In early 1980s, China began to study the navigation satellite system consistent with China’s conditions. In 1994, China started the construction of BeiDou Navigation Satellite Demonstration System. In 2000, two BeiDou experimental satellites were launched, and the BeiDou Navigation Satellite Demonstration System was basically established. The third BeiDou experimental satellite was launched in 2003, further enhancing the performance of the BeiDou Navigation Satellite Demonstration System, and then it was officially brought into services [1]. In 2004 China started construction of BeiDou Navigation Satellite System (BDS) [2], and the first Medium Earth Orbit (MEO) satellite was launched in 2007. By the end of 2012, the BeiDou system will consist of 14 satellites, including 5 Geostationary Orbit (GEO) satellites, 5 Inclined Geosynchronous Orbit (IGSO) satellites (two in-orbit spares), and 4 MEO satellites. BeiDou Navigation Satellite System with global coverage will be completely established by 2020 [1]. BeiDou Navigation Satellite System retains the active positioning and short message services from BeiDou Navigation Satellite Demonstration System, and has provided initial operational services to China and most parts of its surrounding areas from December 27, 2011, including continuous passive positioning, navigation and timing services. Up to October 25, 2012, 16 BeiDou navigation satellites have been launched successfully, excepting that 3 satellites launched in September 19 and October 25, 2012 are testing in orbit, of which 11 satellites (4 GEO, 5 IGSO and 2 MEO) are in operation normally in the period considered for this paper (September 2012), which enables initial evaluation of the BeiDou-only RTK positioning. Shi et al. [3] assessed the accuracy of BeiDou/GPS dual-frequency precise relative positioning over very short baseline under the BeiDou “3 GEO + 3 IGSO” constellation. Montenbruck et al. [4] analyzed the success rate of BeiDou triple-frequency geometry-free AR and the accuracy of epoch-wise relative positioning by BeiDou carrier phase measurements over very short baseline. In this contribution, we evaluate the performance of the BeiDou single-epoch dual-frequency RTK over short baseline; the success rate and reliability of single-epoch AR and the accuracy of RTK positioning for BeiDou or BeiDou/GPS are demonstrated by BeiDou/GPS dual-frequency data collected in Beijing; the improvements of adding the BeiDou data to the GPS data in AR and positioning accuracy are also analyzed.
2 Short-Baseline BeiDou/GPS RTK Model
Because there are no common frequencies between BeiDou B1/B2 (1,561.098 MHz/1,207.14 MHz) and GPS L1/L2 carrier frequency, the respective reference satellites were selected for BeiDou and GPS system when constructing the Double-Differenced (DD) observation equation, in order to retain the integer property of the DD ambiguities [5, 6]. For simultaneous measurements over short baselines, the receiver and satellite related errors (the clock error, hardware delay and the initial phase offsets etc.) are completely eliminated, while the DD troposphere and ionosphere errors can also be neglected. As a result, the DD observation equation from the receivers r and b and the satellites s and k can be written as:
where the symbol \( \left( \cdot \right)_{br}^{ks} = \left( \cdot \right)_{r}^{s} - \left( \cdot \right)_{r}^{k} - \left( {\left( \cdot \right)_{b}^{s} - \left( \cdot \right)_{b}^{k} } \right) \) indicates the DD operator, P and L is the code and phase observations. The subscript j denotes B1, B2, L1 or L2, \( \rho \) the geometric distance between receiver and satellite, \( \lambda \) the wavelength, N the ambiguity, e and \( \varepsilon \) the code and phase measurement errors include unmodelled errors. It is well known that the satellites orbit errors and base receiver position errors will have no significant influence on the short baseline (<10 km) [7]. Thus, the linearized DD code and phase observation equations can be written as:
where the symbol \( \bar{\rho }_{br}^{ks} \) denotes the approximate geometric distance between receiver and satellite, \( {\mathbf{u}}_{r}^{s} = \left( {{\bar{\mathbf{r}}}^{s} - {\bar{\mathbf{r}}}_{r} } \right)\left\| {{\bar{\mathbf{r}}}^{s} - {\bar{\mathbf{r}}}_{r} } \right\|^{ - 1} \) is the unit line-of-sight vector from receiver to satellite. The baseline increment vector is \( \Updelta {\mathbf{r}}_{br} \), and the satellite and receiver approximate position vector are \( {\bar{\mathbf{r}}}^{s} \) and \( {\bar{\mathbf{r}}}_{r} \). As a result, the parameters to be estimated are the baseline increment vector and the DD integer ambiguities. After the real-valued ambiguities and its covariance matrix were obtained, the well-known LAMBDA algorithm [8] was applied to solve ambiguities to their integers, and the solved integer ambiguities were validated by the ratio test [9]. If the ratio test was passed, the corresponding integer ambiguities were fixed, and then the fixed solutions of the baseline vector were computed.
3 Inter-System Time and Coordinate System Differences
BeiDou and GPS both use their own time scales, in addition, which are connected to different realizations of UTC. The BeiDou system time is the BeiDou Time (BDT), which is connected to the UTC maintained by Nation Time Service Center (UTCNTSC), Chinese Academy of Sciences. The GPS system Time (GPST) is connected to the UTC kept by the US Naval Observatory (UTCUSNO). Both GPST and BDT are continuous uniform time scale, which differ from UTC by leap seconds. GPST was started on January 6, 1980 UTC, and BDT was started on January 1, 2006 UTC [1], when the number of leap seconds is 14 s. As a result, the difference between GPST and BDT is 14 s, and further difference \( \tau \) (modulo one second) arises from the fact that GPST and BDT are kept by different master clocks, namely, BDT = GPST – 14 s + \( \tau \). From the Eqs. (12.3) and (12.4), it is known that the clock errors related to difference time system are eliminated, and thus the inter-system time system difference has no influence on the DD observations. The main influence of the time system difference reflects on the determination of the signal transmission time which will be used for satellite position calculation by using the navigation message. The time in the GPS and BeiDou navigation message belongs to their own time system respectively. Assuming that the receiver time of reception of the signal is in GPST, the signal transmission time \( t_{\text{s}} \) (in GPST for GPS satellites or BDT for BeiDou satellites) can be computed by the following formulas:
where the symbol \( t_{\text{r}} \) denotes the reception time at receiver (in GPS Time), and BDS denotes BeiDou system, dt satellite clock error. It should be pointed out that the difference between the GPST and BDT (modulo one second) is included in the code observations.
The coordinate reference system of the BeiDou system is China Geodetic Coordinate System 2000 (CGCS2000) [2], and that of GPS is World Geodetic System 1984 (WGS84). The definitions of the origin, scale, orientation and time evolution of the orientation for CGCS2000 and WGS84 are identical [10, 11]. Their realization is also consistent, and they can be treated as the same coordinate system at the level of a few centimeters. It should be pointed out that the baseline increment vector \( \Updelta {\mathbf{r}}_{br} \) in the Eqs. (12.3) and (12.4) respectively belong to CGCS2000 for BeiDou observations and WGS84 for GPS observations, namely, in nature that it is different in BeiDou and GPS satellite observation equations. However, the influence of the cm-level inter-coordinate system difference on the calculation of the baseline vector can be neglected for the short baseline. Namely, it can be treated as the common parameter of GPS and BeiDou observations, while the BeiDou and GPS DD observations are related to each other just by the common parameter.
4 Computations and Analysis
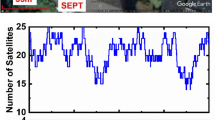
Three static stations (zz03, zz01 and gs01) data in Beijing were collected on September 5, 2012 by the UB240-CORS-II BD2/GPS dual-system quad-frequency (B1/B2 + L1/L2) receivers produced by Beijing Unicore Communications Incorporation. The time span is 24 h, and the sampling rate is 1 s. All data have been processed in a simulated single-epoch RTK mode and the success rate and failure rate of single-epoch AR and the positioning accuracy were analyzed. The success rate of AR was determined as the proportion between the ambiguity-fixed epochs and the total epochs, which denoted the availability of the RTK positioning, and the failure rate of AR was the proportion between the epochs that the integer ambiguity was fixed incorrectly and the ambiguity-fixed epochs, which denoted the reliability of the RTK positioning. The sky plot of BeiDou satellites in Beijing is shown in Fig. 12.1 (left).

Sky plot of BeiDou satellites in Beijing (left) and the number of visible satellites (right)
The number of visible satellites, EDOP, NDOP and UDOP of BeiDou, GPS and BeiDou/GPS with the cut-off elevation of 10° are depicted in Figs. 12.1 (right) and 12.2. In the following text, we name BeiDou/GPS as BGS in the figures and tables for brevity.

DOP values (left EDOP; middle NDOP; right UDOP)
From Fig. 12.1 (right), it is known that the number of visible satellites is 6–10 for GPS, 7–11 for BeiDou, and 14–20 for BeiDou/GPS. The number of visible satellites for BeiDou/GPS is about the double of that for GPS. It is can be clearly seen in Fig. 12.2 that the EDOP of BeiDou is almost comparable to that of GPS and even it is smoother, while the NDOP and UDOP of BeiDou are larger than those of GPS. The averaged EDOP, NDOP and UDOP are 0.73, 1.46 and 2.06 for BeiDou, 0.66, 0.82 and 1.64 for GPS, and 0.45, 0.57 and 1.11 for BeiDou/GPS. Compared to those of GPS, the improvements of these DOPs of BeiDou/GPS are 32, 30 and 32 % respectively. Therefore, it is expectable that the BeiDou/GPS single-epoch AR will be significantly enhance, due to the increased number of visible satellites in combination with the stronger model.
4.1 Experiment over Very Short Baseline
A very short baseline of 4.2 m was formed from two stations zz03 and zz01. The total number of epochs is 86,383, but only one epoch the ratio of BeiDou single-epoch AR is smaller than the threshold of ratio test (ratio = 1.5). Both the success rates for GPS and BeiDou/GPS are 100 %. While the failure rates are 0 for BeiDou, GPS and BeiDou/GPS. The ratio values of single-epoch AR for BeiDou, GPS and BeiDou/GPS are shown in Fig. 12.3.

Ratio values (left BDS; middle GPS; right BGS)
From Fig. 12.3, it is seen that the ratio values of BeiDou single-epoch AR is smaller than 2 only a few epochs. The ratio values of single-epoch AR are larger than 4 for GPS and 7 for BeiDou/GPS. The ratio-test tests the closeness of the float solution to its nearest integer vector [12], the larger it is, the closer the float solution to its nearest integer vector, and the reliability of the integer solution is higher.
The static baseline fixed solution of GPS dual-frequency narrow-lane combination (Ln) by Trimble Total Control 2.71 is used as “true” position. The horizontal scatters and vertical time series of single-epoch RTK fixed solution for BeiDou, GPS and BeiDou/GPS are depicted in Figs. 12.4 and 12.5. The STD and BIAS in the east, north and up direction are given in Table 12.1.

Horizontal error of RTK positioning (left BDS; middle GPS; right BGS)

Vertical errors of RTK positioning
From Fig. 12.4, it can be clearly seen that the scatter in the east direction is evidently smaller than that in the north direction for BeiDou (the left graph), of which scatter plot is analogously oval, while the scatter plots of GPS (the middle graph) or BeiDou/GPS (the right graph) is almost circular. From Fig. 12.5, we can see that the fluctuating of vertical time series of BeiDou/GPS RTK positioning is smaller than those of BeiDou or GPS. The STD of BeiDou RTK positioning in the east direction is 0.88 mm even smaller than that of GPS, whose STD is 1.36 mm, see Table 12.1. Though the STDs of BeiDou RTK positioning in the north and up direction are only 2.45 and 4.85 mm, they are still larger than those of GPS, of which the STDs are 1.65 and 3.65 mm. The STDs of BeiDou/GPS RTK positioning in the east, north and up are 0.85, 1.18 and 2.68 mm respectively, and the corresponding improvements are about 37.5, 28.5 and 26.6 % when compared to GPS. Furthermore, the BAISs of BeiDou RTK positioning are only 0.09, −1.63 and 1.51 mm in the east, north and up direction, which means there is no evident bias exist between the BeiDou RTK solution and the “true” position obtained by GPS data. The BIASs of BeiDou/GPS RTK positioning in the east, north and up direction are −0.41, −0.11 and −0.69 mm and also smaller than those of GPS. As a whole, the 3D RMSs of BeiDou, GPS and BeiDou/GPS RTK positioning are 5.94, 4.60 and 3.16 mm respectively, and the improvement of adding the BeiDou data to the GPS data achieve 31.3 %, which is very exciting.
4.2 Experiment over Short Baseline
A short baseline of 8.2 km was formed from two stations zz03 and gs01. In order to evaluate the performance of BeiDou and BeiDou/GPS RTK under some challenging circumstances, the success rate and failure rate of single-epoch AR are counted under different cut-off elevations of 10°–40° and the consequent results are shown in Table 12.2.
From Table 12.2, we can see that the success rates of single-epoch AR are larger than 94 % for BeiDou and 96 % for GPS with the cut-off elevations of 10°–25°, and the failure rates are smaller than 0.7 % for BeiDou or GPS. Therefore, it is evident that the availability and reliability of the BeiDou single-epoch RTK are comparable to those of GPS at least in the open-sky conditions. When the cut-off elevation is higher than 30°, the success rates of BeiDou are smaller than those of GPS, and its failure rates are also larger than those of GPS. This may be related to the special configuration of BeiDou constellation. It can be seen in Fig. 12.1 (left) that two GEO satellites (C04 and C05) will be shielded when the cut-off elevation reach to 30°, which reduces the number of visible satellite. The success rates of BeiDou/GPS single-epoch AR are larger than those of GPS. The success rates are 100 % when the cut-off elevation is 20° and 25°. Besides, the improvement becomes more evident with higher the cut-off elevations. The failure rates of BeiDou/GPS single-epoch AR are smaller than those of GPS except for the cut off elevation of 40° situation. When the cut-off elevations are smaller than 30°, their failure rates is 0 %. Therefore, the availability and reliability of BeiDou/GPS are obviously superior to those of GPS.
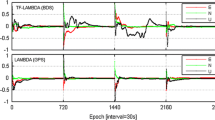
The static baseline fixed solution of GPS dual-frequency ionosphere-free combination (Lc) by Trimble Total Control 2.71 is used as “true” position. The horizontal scatters and vertical time series of single-epoch RTK fixed solution for BeiDou, GPS and BeiDou/GPS with cut-off elevation of 10° are depicted in Figs. 12.6 and 12.7 (left). The STD and BIAS in the east, north and up direction are given in Table 12.3.

Horizontal error of RTK positioning (left BDS; middle GPS; right BGS)

Vertical error of RTK positioning (left) and the elevation of BeiDou satellites (right)
From Fig. 12.6, it is seen that the solution of BeiDou, GPS and BeiDou/GPS RTK positioning are offset from the “true” position in the west–north direction. The BIASs of BeiDou, GPS and BeiDou/GPS solution are about −1, 1 and −0.3 cm in the east, north and up direction respectively, see Table 12.3. The similar BIAS between the BeiDou and GPS solutions suggest that there are strong correlative errors exist between the BeiDou and GPS DD observations. It is easily concluded that they should be the DD ionosphere remainder because the ionosphere delay is not processed in this study while the “true” position is computed by the GPS ionosphere-free combinations. As a result, the STD improvements brought by the adding BeiDou measurements are only −3.2, 12.5 and 7.8 % in the east, north and up directions when compared to GPS-only. As a whole, the 3D RMSs of BeiDou, GPS and BeiDou/GPS RTK positioning are 3.64, 2.60 and 2.52 cm respectively, and the improvement of adding the BieDou data to the GPS data is only 2.9 % and marginal. Therefore, in order to take full advantage of the adding BeiDou data, it may be necessary to minutely deal with the DD ionosphere remainder, though it has no significant influence on AR over short baselines. However, though the ionosphere delay is not processed, the 3D RMS of BeiDou RTK positioning is only 3.64 cm. From Fig. 12.7 (left), we can see that there is a large jump of near 20 cm at 6:00 in the vertical time series of BeiDou RTK positioning. The may be caused by the large DD ionosphere remainder due to the large satellite elevation differences (see Fig. 12.7) and the large UDOP value (see Fig. 12.2).
5 Conclusions
BeiDou Navigation Satellite System has accomplished the deployment of “5 GEO + 5 IGSO + 4 MEO” region constellation, and will officially provide the full services at least in the Asia–Pacific area by the end of 2012. In the present initial services phase, we evaluated the performance of BeiDou single-epoch dual-frequency RTK with real data collected in Beijing, and the following conclusions can be drawn:
-
The availability and reliability of BeiDou single-epoch dual-frequency RTK AR are almost comparable to those of GPS, and those of BeiDou/GPS are higher than those of GPS. Furthermore, the advantage is more remarkable with the higher cut-off elevations.
-
As a whole, the accuracy of BeiDou RTK positioning is slightly worse than that of GPS at present, but it has reach to mm–cm level over very short and short baselines in this contribution. The accuracy of BeiDou RTK positioning in the east direction is even better than that of GPS over very short baseline.
-
The accuracy improvement of adding the BeiDou data to the GPS data reach to 31.3 % for the very short baseline of 4.2 m, but the improvement is only marginal (2.9 %) for the short baseline of 8.2 km, which imply that the strong correlative errors is exist between BeiDou and GPS DD observations, likely due to the DD ionosphere remain errors which is not dealt with in this study.
-
The high availability and reliability of BeiDou/GPS single-epoch AR under the cut-off elevations of 30°–40° is promising to relieve the embarrassment of GPS RTK positioning in the urban canyon.
-
With a completed BeiDou constellation or in the low latitude area of Asia–Pacific area, the number of BeiDou visible satellites will further increase [13]. Thus, it is expectable that the availability and reliability of BeiDou single-epoch RTK positioning will be improved consequently and those of BeiDou/GPS will be much better than at present based on GPS-only.
References
China Satellite Navigation Office (2012) Report on the development of BeiDou navigation satellite system (Version 2.0). May 2012
Yang Y (2010) Progress, contribution and challenges of Compass/Beidou satellite navigation system. Acta Geodaetica et Cartographica Sinica 39(1):1–6
Shi C, Zhao Q, Hu Z, Liu J (2012) Precise relative positioning using real tracking data from COMPASS GEO and IGSO satellites. GPS Solut, Published online: 19 May 2012, doi: 10.1007/s10291-012-0264-x
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2012) Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut, Published online: 12 June 2012, doi: 10.1007/s10291-012-0272-x
Alves P (2001) The effect of Galileo on carrier phase ambiguity resolution. In: ION GPS 2001, 11–14 Sept 2001, Salt Lake City, UT, pp 2086–2095
Julien O, Cannon ME, Alves P, Lachapelle G (2004) Triple frequency ambiguity resolution using GPS/Galileo. Eur J Navig 2(2):51–56
Kleusberg A, Teunissen PJG (eds) (1996) GPS for geodesy. Springer, Berlin
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82. doi:10.1007/BF00863419
Verhagen S (2004) Integer ambiguity validation: an open problem? GPS Solut 8:36–43. doi:10.1007/s10291-004-0087-5
Ziqing W (2008) China geodetic coordinate system 2000 and its comparison with WGS84. J Geodesy Geodyn 28(5):1–5
Yang YX (2009) Chinese geodetic coordinate system 2000. Chin Sci Bull 54:2714–2721. doi:10.1007/s11434-009-0342-9
Teunissen PJG, Verhagen S (2009) The GNSS ambiguity ratio-test revisited: a better way of using it. Surv Rev 41(312):138–151
Yang Y, Li J, Xu J, Tang J, Guo H, He H (2011) Contribution of the COMPASS satellite navigation system to global PNT users. Chin Sci Bull 56(26):2813–2819. doi:10.1007/s11434-011-4627-4
Acknowledgments
This work is supported by the National Natural Science Funds of China (Grant Nos. 41020144004; 41104022), the National ‘‘863 Program’’ of China (Grant No: 2013AA122501) and the 2nd and 3rd China Satellite Navigation Conference (Grant Nos. CSNC2011-QY-13; CSNC2012-QY-3).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Li, J., Yang, Y., Xu, J., He, H., Guo, H., Wang, A. (2013). Performance Analysis of Single-Epoch Dual-Frequency RTK by BeiDou Navigation Satellite System. In: Sun, J., Jiao, W., Wu, H., Shi, C. (eds) China Satellite Navigation Conference (CSNC) 2013 Proceedings. Lecture Notes in Electrical Engineering, vol 245. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-37407-4_12
Download citation
DOI: https://doi.org/10.1007/978-3-642-37407-4_12
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-37406-7
Online ISBN: 978-3-642-37407-4
eBook Packages: EngineeringEngineering (R0)