
Abstract
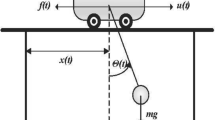
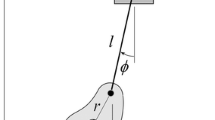
A non-fuzzy self-tuning scheme is proposed for Fuzzy PD controller in this paper. To eliminate the design complexity, output scaling factor (SF) of the proposed fuzzy controller is updated according to the process trend by a gain modification factor, which is determined by the normalized change of error of the system and its number of fuzzy partitions. The proposed non-fuzzy self-tuning fuzzy PD controller (NFST-FPDC) is demonstrated on a laboratory scale overhead crane. Moving a suspended load along a pre-specified path is not an easy task when strict specifications on the swing angle and transfer time need to be satisfied. In this study, twin NFST-FPDC are designed to control the trolley position of the crane and swing angle of the load. The proposed non-fuzzy gain tuning scheme guarantees a fast and precise load transfer and the swing suppression during load movement, despite of model uncertainties.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Hong, K.S., Ngo, Q.H.: Port Automation: modeling and control of container cranes. In: Inter. Conf. on Instrumentation, Control and Automation, pp. 19–26 (October 2009)
Hamalainen, J.J., Marttinen, A., Baharova, L., et al.: Optimal path planning for a trolley crane: fast and smooth transfer of load. In: IEE Proc. Control Theory and Applications, vol. 142(1), pp. 51–57 (1995)
Li, C., Lee, C.Y.: Fuzzy motion control of an auto-warehousing crane system. IEEE Trans. on Ind. Electron. 48(5), 983–994 (2001)
Park, M.S., Chwa, D., Hong, S.K.: Antisway tracking control of overhead cranes with system uncertainity and actuator nonlinearity using an adaptive fuzzy sliding mode control. IEEE Trans. on Industrial Electronics 55(11), 3972–3984 (2008)
Sorensen, K.L., Singhose, W., Dickerson, S.: A controller enabling precise positioning and sway reduction in bridge and grany cranes. Control Engineering Practice 15, 825–837 (2007)
Lee, C.C.: Fuzzy logic in control systems: Fuzzy logic controller—Parts I, II. IEEE Trans. on Syst., Man, Cybern. 20, 404–435 (1990)
Shinskey, F.G.: Process Control Systems—Application, Design, and Tuning. McGraw-Hill, New York (1998)
Malki, H.A., Li, H., Chen, G.: New design and stability analysis of fuzzy proportional-derivative control systems. IEEE Trans. on Fuzzy Systems 2, 245–254 (1994)
Mudi, R.K., Pal, N.R.: A Self-Tuning Fuzzy PD Controller. IETE Journal of Research (Special Issue on Fuzzy Systems) 44(4&5), 177–189 (1998)
Mudi, R.K., Pal, N.R.: A robust self-tuning scheme for PI and PD type fuzzy control- lers. IEEE Trans. on Fuzzy Systems 7(1), 2–16 (1999)
Mudi, R.K., Pal, N.R.: A self-tuning fuzzy PI controllers. Fuzzy Sets and Systems 115, 327–338 (2000)
Pal, N.R., Mudi, R.K., Pal, K., Patranabis, D.: Rule Extraction through Exploratory Data Analysis for Self-Tuning Fuzzy Controller. Int. J. of Fuzzy Systems 6(2), 71–80 (2004)
Pal, A.K., Mudi, R.K.: Self-Tuning Fuzzy PI controller and its application to HVAC system. IJCC (US) 6(1), 25–30 (2008)
Pal, A.K., Mudi, R.K.: Development of a Self-Tuning Fuzzy Controller through Relay Feedback Approach. In: Das, V.V. (ed.) CIIT 2011. CCIS, vol. 250, pp. 424–426. Springer, Heidelberg (2011)
Chang, C., Hsu, S., Chiang, K.: A practical fuzzy controllers scheme of overhead crane. Journal of Control Theory and Applications 3, 266–270 (2005)
Liu, D., Yi, J., Zhao, D., Wang, W.: Adaptive sliding mode fuzzy control for a two dimensional overhead crane. Mechatronics 15, 505–522 (2005)
Yang, J.H., Yang, K.S.: Adaptive coupling control for overhead crane systems. Mechatronics 17(2/3), 143–152 (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Pal, A.K., Mudi, R.K., De Maity, R.R. (2013). A Non-Fuzzy Self-Tuning Scheme of PD-Type FLC for Overhead Crane Control. In: Satapathy, S., Udgata, S., Biswal, B. (eds) Proceedings of the International Conference on Frontiers of Intelligent Computing: Theory and Applications (FICTA). Advances in Intelligent Systems and Computing, vol 199. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-35314-7_5
Download citation
DOI: https://doi.org/10.1007/978-3-642-35314-7_5
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-35313-0
Online ISBN: 978-3-642-35314-7
eBook Packages: EngineeringEngineering (R0)