
Abstract
The main targets in the development of transmissions are increasing driving performance, efficiency and driving comfort. An important aspect in this context is decreasing transmission noise. The most significant transmission noise is whining. It is caused by mesh contact noise of gear pairs under load. The excitations caused by the tooth contact are transferred to the gearbox housing by gearwheel bodies, shafts and bearings. Here from they are either transmitted to the attached parts (by structure-borne noise) or emitted to the environment as air-borne noise. In this paper an approach for the simulation of the noise behaviour of a transmission will be presented. To compute the level of structure-borne noise on the surface of the gearbox housing, a simulation model was built in a multi-body simulation environment. The excitation phenomenon of whining as well as the propagation of the resulting structure-borne noise up to the surface of the housing is considered in this model. Therefore, shafts and housing are integrated in the multi-body simulation as flexible bodies. Additionally, an element to abate propagation of structure-borne noise is introduced. An effective way is to encapsulate the bearings. In this case a ring between the bearing outer ring and the housing is used. Different designs of the rings will be presented as well as their potential to reduce the transmission of structure-borne noise which is estimated in a finite element simulation. To validate the model, measurements of an experimental transmission are made. On a testing bench, a single-stage transmission is driven under specified load and speed. Accelerometers are installed at different positions on the housing and measured results are compared to the simulation results at these positions.
F2012-J02-004
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Due to increasing customer requirements, an important goal in passenger car development is to decrease transmission noises. To be able to influence the acoustic behaviour of a transmission, it is necessary to estimate its affection to propagate structure-borne noise in an early development stage. Therefore, simulation models are needed that predict the excitation phenomena as well as the propagation of structure-borne noise. The aim is to develop models that are able to estimate the potential of different designs to abate structure-borne noise without the necessity of an experiment to validate the results.
The most significant transmission noise is whining [1], not only because of its absolute loudness but also because of its tonal characteristic, has it been described as annoying by customers. Whining noises are caused by gear pairs driven under load. From the toothing, the excited structure-borne noise waves are transferred to the housing by means of gear wheel bodies, shafts and bearings. Here from they are either transmitted to the attached parts (by structure-borne noise) or radiated as air-borne noise. In this paper, a computational model to simulate the excitation phenomena and the propagation within the gearbox is presented. In a further step, a newly developed component is introduced. It is part of the acoustic transmission path and its purpose is to reduce the propagation of structure-borne noise. The element that is used is a ring between the bearing outer ring and the housing. It has been chosen because it is one of the last parts in the structure-borne noise transmission path inside the gearbox. Additionally, the load in this part is primarily static and no other functions have to be fulfilled. Different physical principles were considered for the design of the ring and transferred into real design proposals.
2 Excitation and Propagation of Transmission Noises
As described in the introduction, whining is the most significant transmission noise that occurs when a gear pair is driven under load. By definition, the main function of a transmission is the conversion of torque and speed. The main component in this case is the gear stage whose purpose it is to transmit rotation and torque from the input to the positively locking output shaft. During this transfer process, three types of excitations occur that may be divided into parametrical excitation, displacement excitation and shock excitation.
Mainly, involute profiles are used for gears in passenger car transmissions. With this profile type in load-free cases the rotation is transmitted uniformly from the input to the output shaft. Additionally, these profiles can be produced easily and cost-effectively, and are insensitive to centre distance fluctuation [2]. Under load, the driving and the driven gear wheel, as well as the shafts and the housing, undergo deformation. This consists of driving wheel deformation, driven wheel deformation and Hertzian flattening of the tooth flanks [2]. Depending on the meshing position, the rigidity of a straight spur gear pair varies as shown in Fig. 1a.

Overall tooth rigidity pattern c s , meshing rigidity c γ (average value of c s over time). a Straight spur gearing; b helical gearing [2]
As one or two tooth pairs are in contact alternately, the overall rigidity c S results from a superposition of the individual tooth pair rigidity c of all tooth pairs in contact. If two pairs of teeth are in contact, the rigidity reaches its maximum. During the phase of only one tooth pair in contact, the highest rigidity is reached if the levers of both teeth are nearly similar. In case of tip or root contact, the rigidity decreases. Figure 1b shows the tooth rigidity of a helical gear pair. There is less variation in rigidity compared to straight spur gears. One reason is the more sinusoidal characteristic of the rigidity of one pair of teeth; the other reason is the contact ratio. Normally, in helical cut gear pairs more than two tooth pairs are always in contact. Therefore, the absolute value of rigidity varies less than that of straight spur gearings. In a first approximation, the characteristic of gear pair rigidity can be described by a sine function. Equation (1) illustrates the relation between the gear mesh frequency f mesh in Hz, the operating speed n in rpm and the number of teeth z.
Even in unloaded condition, deviations from an ideal flank lead to variations in the law of gears. They can occur as tooth trace deviation or as deviations from an ideal involute profile. They result either from manufacturing imperfections or are part of the tooth design.
In most cases, tooth design is a complicated optimization problem. Even a gear pair which has been optimised for its load-carrying capacity may produce unfavourable noise. The load case significantly influences the behaviour of gear pairs. Under different load and speed conditions deformations of teeth, shafts, and housing vary. As a consequence tooth contact conditions change as well. For an automotive transmission a high torque range is required. Different types of drivers as well as different driving situations (e.g. up-hill driving) generate varying speed and torque demands.
A third phenomenon of excitation is shock excitation. Under load, the driving and driven teeth are deformed. Consequently, the unloaded tooth of the driving wheel comes in contact with an unloaded tooth of the driven wheel. Due to these modified engagement conditions, the teeth knock against each other. These meshing impacts can also be caused by pitch errors.
The excitation arising from this phenomenon is periodic and pulse-like. Profile corrections, such as tip or root relief, or accurate manufacturing, can reduce or even eliminate this type of excitation.
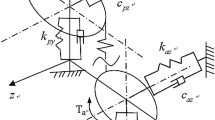
Only a small share of vibrational energy caused by tooth contact is radiated inside the gearbox housing as air-borne noise. A large part of the excitations are propagated by gear bodies, shafts and bearings as structure-borne noise. One part is transmitted to the gearbox housing and radiated as air-borne noise. Another part is transmitted to other parts attached to the gearbox as structure-borne noise. The propagation path of the excitation is shown in Fig. 2, the small, thin arrows symbolizing air-borne noise, the bold ones structure-borne noise.

Acoustic transmission path of a gearbox
Vibrations and waves in solid bodies are commonly known as structure-borne noise. The propagation results from stress and strain deformation of the solid body and can be described by a vector of velocity and a stress tensor [3]. Due to material damping and absorption processes, the amplitudes of the waves decrease. Based on these facts, concepts to reduce the propagation of structure-borne noise are developed and presented in this paper.
3 Testing Transmission in Simulation and Testing Environment
To analyze the potential of different design approaches to minimise the propagation of structure-borne noise, a testing transmission, shown in Fig. 3, was developed. In this single-stage transmission that is driven via an input shaft (1), torque and speed are changed by a gear stage (2) which is spur-toothed and passed to the output via an output shaft (3). The design modifications to abate structure-borne noise will be integrated in the adapter ring (4) between the bearing outer ring and the housing. This component was chosen because it is one of the last parts in the structure-borne noise transmission path inside the gearbox. Additionally, the load case in this ring is predominantly static and no other functions, such as converting torque or sealing, have to be fulfilled. Under these conditions the design approach can be developed with few limitations. To be able to validate the different designs of the ring, an accelerometer is fixed on the surface of the gearbox housing (5).

Testing transmission
Being able to forecast the dynamic behaviour of the testing transmission, a simulation model was developed in the multi-body simulation environment SIMPACK. Within the simulation model the excitations in the tooth contact as well as the acceleration of the gear-box housing due to the transmitted structure-borne noise is computed. In this case, the excitations are caused by the tooth contact. As whining noises are generated in the meshing contact, a main focus is on the modelling of the teeth and on the link between the driving and driven wheel. Important impacts on the whining noise like the macro and micro geometry were taken into account by measuring the tooth flanks on a 3-dimensional coordinate measuring machine. In modelling the gearwheels in SIMPACK these measurements were used to define the geometry of the tooth flanks.
In addition to the geometry, the connection between the driving and the driven gearwheel has to be considered. SIMPACK provides a force element called “Gear Pair” which is useful in this case. Gear wheel body deformation stiffness, tooth bending and share stiffness as well as Hertzian contact stiffness are taken into account in computing the stiffness of the tooth contact [4] which is a function of the meshing position. Another important impact that is considered is the tilt of the gear wheels. Due to geometrical dislocations in the transmission under load, the meshing conditions vary from the unloaded case and thereby the gear pair stiffness changes as well.
Figure 4 shows the frequency analyses of the gear load at an input speed of 1,000 rpm. The time signal of the gear loads was analysed by means of a fast Fourier transformation. The gear mesh frequency f mesh , dependant on the number of teeth is clearly visible. With a number of teeth of z = 25, the gear mesh frequency f mesh = 417 Hz calculated as given in Eq. (1). The harmonic frequencies appear with decreasing amplitudes over the number of the order.

Frequency response characteristics of the gear load at an input speed of 1,000 rpm
The shafts that the gearwheels are fixed to are included in the model as flexible bodies. As the transmission is driven under load, the shafts as well as all other parts that belong to the power flow undergo deformation. As the gearwheels are fixed on the shafts by a key connection, the meshing contact conditions vary and a flexible formulation of the shafts is necessary. With the use of flexible bodies in a multi-body simulation, the behaviour of each body under load is considered and can be described nearly as well as in a complete finite element computation, but in a fraction of simulation time. All parts that are integrated as flexible bodies were modelled in the finite element software ANSYS. The meshing was done there and nodes that should be available in the multi-body simulation to impinge loads or evaluate deformations were defined as interface nodes. For the modal reduction in ANSYS, all nodes of the finite element structure are divided into interface nodes which are available afterwards in the multi-body simulation environment and internal nodes. During the modal reduction, the static constraint modes and the eigenmodes of the part are calculated [5]. Hence, in the multi-body simulation deformations caused by an exciting force are calculated efficiently.
The bearings of the shafts are important parts in the acoustic transmission path. Their stiffness varies with the dislocation and tilt of the bearing inner ring relative to the bearing outer ring. In the model, the bearings are represented by a force element which uses a nonlinear map containing the bearing stiffness [6]. As the structure-borne noise is transmitted by the adapter ring and the gearbox housing, these components are integrated as flexible bodies as well. On a node that is located on the surface of the gearbox housing at the same position as the accelerometer on the testing transmission, the acceleration is calculated to be able to validate the simulation model.
For the measurements, the transmission was mounted on a testing bench at the Institute of Machine Components. It was fixed between an input machine (P max = 300 kW; T nom = 704 Nm at 4,475 rpm; n max = 8,000 rpm) and an output machine (P max = 460 kW; T nom = 1,494 Nm at 2,960 rpm; n max = 8,000 rpm) as shown in Fig. 5. Incremental encoders with 10,000 counts per revolution are mounted on the input and output shaft. This allows high-precision measuring of the state of speed. The transmission is connected to the input and output machine by two elastic and torsional rigid couplings.

Transmission testing bench
The simulated and the measured values of the acceleration of the gearbox housing are shown in Fig. 6. The maximum amplitude of acceleration in the measurement, as well as the simulation, appears at the third harmonic of the gear mesh frequency at 1,667 Hz. The fifth and the sixth harmonic are also dominant in the measurement as well as in the simulation. In general the simulated values are higher than those that are measured. The reason is that the housing is modelled as one part where the housing joint is neglected where structure-borne noise energy can be dissipated.

Measured and simulated acceleration on the surface of the gearbox housing at 1,000 rpm
The measurement as well as the simulation illustrates the influence of all the parts belonging to the acoustic transmission path. In Fig. 4, the maximum excitation force of the structure-borne noise is located at 417 Hz. In the acceleration signal measured on the surface of the housing, this frequency is inconspicuous. Contrarily higher orders of the gear mesh frequency with a smaller level of gear load excite a major vibration of the housing. Hence the need to consider the entire acoustic transmission path is apparent. To reduce the propagation of structure-borne noise, propagation an adapter ring, shown in Fig. 3, is used. This element is designed to absorb vibrations caused by the toothing.
4 Design Approaches for the Adapter Ring
In a first step, the designs of the adapter ring are developed analytically by considering different possibilities to abate structure-borne noise. To be able to compare the different designs, finite element models were built in ANSYS. In the models, the exciting forces caused by the toothing are approximately described by a sine function with a varying excitation frequency from 16 Hz to 10 kHz. Representative values to characterize the acoustic behaviour are calculated by mounting the rings in a plate that represents the housing.
In this paper, one design approach to attenuate the propagation of structure-borne noise waves by integrating geometrical discontinuities into the component is presented. The discontinuities can be by produced by removing material. The crucial parameters of the discontinuities are: geometry, frequency and distance to the excitation point. The propagation of structure-borne noise may be described as wave fronts moving through solid bodies. Impinging a discontinuity the waves are reflected, diffracted or spread. Based on the reflection progresses, the design of the adapter ring is acoustically optimised. An aspect to be considered is that mass and stiffness parameters should not be reduced too much. Otherwise the input impedance of the component is too small to improve the acoustic behaviour. A design approach that is shown in Fig. 7a includes slot-shaped discontinuities. The advantage of these kinds of discontinuities is that the transmission path for structure-borne noise can be significantly extended and material damping can reduce the vibration energy.

a Design approach using geometrical discontinuities (M1); b resonator design approach (M2)
Another possibility to abate structure-borne noise is to use resonators. Therefore, additional spring-mass systems are integrated in the ring design. If appropriate, mechanical properties are chosen whereby, a significant amount of vibration energy can be eliminated. In the design approach shown in Fig. 7b, resonators are fixed as exposed beams at the vibrating body. Those free-standing structures are easily excited, especially by bending vibration waves, the most important waves in the propagation of structure-borne noise. If damping materials are mounted on the surface of these structures, vibration energy is converted into another, acoustically uninteresting, kind of energy. In case of efficient use, they have to be actuated near their eigenfrequencies. For a known frequency, they can be aligned to this by their geometrical properties such as length and thickness. With the vibration of the beams, a lot of vibration energy can be withdrawn. Without any further damping, nearly all the converted energy is radiated as air-borne noise.
Finite element calculations were made to compare these design approaches. In the simulation environment each ring is mounted in a plate and excited concentrically by an alternating sinusoidal force. The behaviour of each design caused by the excitation is measured as acceleration at nodes on the inner and outer surface of the ring. To evaluate the acoustic characteristics, two specific values are used, the transfer function and the insertion loss. The transfer function T(f) is calculated as quotient of output a out (f) and input a in (f) acceleration [7].
The insertion loss ΔL a directly describes the efficiency of a design approach compared to a non-optimised ring by relating the effective value of acceleration of the optimised ring â opt and the non-optimised ring â 0 as given in Eq. (3).
Results given by this finite element calculation can only be used to compare the different designs. In reality, the values can vary tremendously.
In Fig. 8, the transfer values and insertion losses for a non-optimised ring (M0), the ring with slots (M1), and the resonator ring (M2) are shown. The frequency range of interest is based on the number of teeth, which, in this case, is 25. With a maximum input speed of 6,000 rpm, the gear mesh frequency is mainly about 2,500 Hz, with the first harmonic frequency at roughly 5,000 Hz.

Transfer value (a) and insertion loss (b) for a ring with holes (M1.1) a ring with slots (M1.2)
The transfer values for model M1 and M2 are less than those of the original model M0. The insertion loss shows that Model M1 achieves a reduction of noise level in the lower frequency range of about 3 dB and Model M2 achieves values up to a reduction of 37 dB. The calculated values can only be used for a comparison between the different ring designs. To prove the real potential, experimental results or simulation models of the whole transmission are required.
5 Conclusion
A testing transmission to analyze different possibilities to abate the propagation of structure-borne noise was developed. For this transmission, a simulation model to calculate the excitation phenomena in the tooth contact as well as the transmission of structure-borne noise by shafts, bearings and housing was developed. A comparison of simulated and measured values shows that it is possible to forecast acoustic behaviour by a multi-body simulation model that includes all parts of the acoustic transmission path as flexible bodies. Comparing the values of the exciting forces in the tooth contact and the acceleration values on the gearbox housing, the need to consider the acoustic transmission path is apparent. Some excitation frequencies, but not necessarily the one with the highest energy, affect the acceleration of the gearbox housing. Others do not appear on the surface of gearbox housing as structure-borne noise.
Different rings to encapsulate the bearings are used to reduce the propagation of structure-borne noise. Two design approaches taking into account different physical principals are introduced in this paper. The potential of the rings is estimated using a simple finite element model. In a further step, the real potential of those rings has to be tested by integrating them into the multi-body simulation model of the transmission, or by mounting them in the testing transmission and perform measurements on the testing bench.
References
Naunheimer H, Bertsche B, Ryborz J, Novak W (2011) Automotive transmissions. Springer, Berlin
Niemann G, Winter H (1983) Maschinenelemente band II. Springer, Berlin
Cremer L, Heckel M (2005) Structure-borne sound. Springer, Berlin
Simpack AG (2012) SIMPACK documentation, version 9.1, Gilching
Craig RR, Bampton MDD (1968) Coupling of substructures for dynamic analysis. AIAA J 6(7):1313–1319
Vesselinov V, Weber J, Hahn T (2007) Wälzlagerkennfelder für MKS-Programme. In: Gold PW(ed) Proceedings of the ATK 2007. Aachen, p 213–223
Schmidt A (1997) Impedanzelement, Forschungsvereinigung Antriebstechnik e.V., Forschungsvorhaben Nr. 522, Abschlussbericht, TU Clausthal, Institut für Maschinenwesen
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Sanzenbacher, S., Bertsche, B. (2013). Reduction of Structure-Borne Noise by Simulation. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 201. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33832-8_8
Download citation
DOI: https://doi.org/10.1007/978-3-642-33832-8_8
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33831-1
Online ISBN: 978-3-642-33832-8
eBook Packages: EngineeringEngineering (R0)