
Abstract
The chapter introduces the shimmy mechanism caused by self-excitation components for a vehicle while shimmy is identified at 120 km/h. The Operating Deflection Shape (ODS) analysis used for the chassis from 90 to 140 km/h. The front-right lower arm is identified as the shimmy cause by analysis of movement characteristic change of the chassis components.
F2012-J01-002
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Car shimmy is a common problem as cars driven. For a long time, a lot of people thought that shimmy is a kind of malfunctions. In fact any car has shimmy phenomenon, but the shimmy level in difference Slight shimmy is not perceptible, often neglected, but this accumulation over a certain time period will cause the system worn and fatigue failure, and the life is greatly damaged. Serious shimmy will result in the system on the brink of collapse, eventually lead to the safety accidents. So it is very important to research the shimmy problem.
Shimmy is the phenomenon of vibration of wheel steer when the car is driven on smooth road. Research shows that: shimmy can be classified as the forced vibration and the self-excited vibration [1, 2], the forced vibration is mainly the resonance phenomenon excited by the tire unbalanced mass; The Self-excited type shimmy is Hopf bifurcation phenomena in nonlinear dynamics. Based on the coupling of steering system and the front suspension system [3], the steering system parameters had been studied on the effect of overloading of vehicles shimmy; In the literature [4], the bifurcation theory and numerical simulation were applied for the research of the turning wheel shimmy, and found that the turning wheel shimmy might produce transient chaos movement; In the literature [5], the numerical methods were used to study the parameters on the influence of the front wheel shimmy, and pointed out that the steering gear stiffness, horizontal bars stiffness, kingpin caster, tire cornering stiffness could cause a change of self-excited shimmy. From the results of the study for the last decades, the analysis of the problems of shimmy has been made a lot of breakthrough in theories. But it also shows that shimmy is a very complicated system problem with many influencing factors, and there are still a lot of problems not are completely resolved.
A robust shimmy performance is a system interaction between the tire, wheel, suspension and steering system. As a system issue it is usual process for the solution to optimize every component of the system individually until the results can be acceptable. This kind of practice can solve the problems, but the disadvantages are more time and higher cost. In this chapter, i.e. a car shimmy, in order to solve the shimmy problem, the method to quickly find the key components which affects the shimmy is provided here according to the study of the self-excited vibration characteristics, with the aid of the ODS analysis of the chassis systems movement characteristics, modal analysis.
2 Shimmy Mechanism
To solve the problem of shimmy, the characteristics of the steering wheel shimmy are considered as the beginning of the study, in which the shimmy vibration formats and vibration transmission paths will be concerned.
2.1 The Steering Wheel Shimmy Characteristics Analysis
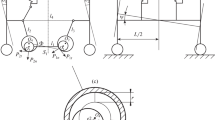
The steering wheel shimmy is a rotating vibration. It can’t be directly figured out through the acceleration sensor test. In this chapter, two accelerometers mounted on the circumference of the steering wheel are used for extraction of shimmy and shake, as shown in Fig. 1. Actually, the shimmy is determined by the difference of acceleration between two accelerometers.

Schematic diagram for measurement of steering shimmy
2.2 Transfer Path Analysis
Figure 2 shows the typical transfer paths of steering shimmy and brake judder. The excitation forces firstly come into the suspension through the front wheel spindles and induce suspension system vibration. From suspension to steering system, there are two paths for the vibration transmission. In the primary path, the majority of the vibration energy is transmitted to the rack rod of the steering gearbox through rigid body motion. In the secondary path, energy is transferred to the gearbox through vehicle body structural motion, i.e. flexible body motion. The vibration from the gearbox is then transferred to the steering system and eventually the steering wheel.

Transfer path of steering shimmy and brake judder
2.3 Potential Solutions
Shimmy can be divided into the forced vibration and the self-excited vibration. Forced vibration is mainly the resonance phenomenon excited by the tire unbalanced mass Self-excited type shimmy is Hopf bifurcation phenomena in nonlinear dynamics. With the transmission path analysis in Sect. 2.2, the proposals of shimmy solution measures are listed as the followings:
-
Strength of Excitation (Uniformity/Brake DTV)
-
Coupling Mechanisms between suspension motions/components (suspension dynamics)
-
Dynamics of Steering Wheel/Column.
3 Shimmy Control
3.1 Descriptions of the Problem
The individual vehicle among the products was driven on smooth roads. When its speed was reached about 110–130 km/h, the steering wheel had serious shimmy in vibration (Fig. 3). The peak frequency was shown in Fig. 4.

The steering wheel shimmy with speeds

120 km/h, steering wheel shimmy under different frequencies
3.2 The Strategies for Shimmy Control
According to the above potential measures, the following three aspects shall be carried out in analysis.
-
Checking the balance wheels and Toe-in;
-
Evaluating the steering system sensitivity;
-
Appling Operating Deflection Shape (ODS) analysis into chassis system to find the abnormal vibration parts; determining the problem part either in the forced vibration or in the self-excited vibration through by the modal analysis.
3.3 Shimmy Analysis and Control
3.3.1 Tire-Wheel and Toe-In
Wheel imbalance mainly involves three aspects: Tire Uniformity, static unbalance and Couple Unbalance. For diagnosing the problem rapidly, the good wheels are selected and assembled into a car having the problems If the problem of shimmy is still there, the cause due to the wheel imbalance will be ruled out (in Fig. 5).

The influence of the wheel
As the vehicles in the course of driving, the beam angle results in the fore-half part of the tire on the road contact surface to slide laterally to the wheel inside, and the rear-half part of the tire forward to the wheel outside t -That is the reason to lead the wheel steer swing. If the former bunch is improper, front wheel will produce a severe vibration around the dowel, thus produce a shimmy problem. Through the check list shown as in Table 1, the front bunch in problem vehicle meets the design requirement.
3.3.2 Sensitivity Analysis of the Steering System
Sensitivity analysis is a very simple and effective method to evaluate the dynamic characteristics of the material shape due to the deviation in dimensions in the procedure of massive production. So we need to have the vehicle steering shimmy comparison test, which is as shown in Fig. 6. Because two cars have the same levels, the steering system influence is ruled out.

Sensitivity analysis of the steering system
3.3.3 Suspension Dynamics
If the vibration of the system is going to increase, one of the parts in the system is inevitable to have the resonance or self-excited vibration. The abnormal vibration in mode shape will be observed. So that ODS analysis is used for suspension system to confirm abnormal components with the shimmy problems, As comparing the chassis system vibration characteristics with and without shimmy, it is found that the front-right lower arm and the wheel vibration model are abnormalities if the car has shimmy problems. Figure 7 shows the sensor installation positions. Figure 8 shows the two parts in vibration mode.

Sensor installation positions

Front-right lower arm and the wheel vibration model figure
There are two reasons can lead to abnormal vibration in resonance (or self-excited vibration), or forced vibration. So the natural frequencies of the two parts are needed in testing. The results show the vibration mode of wheel around the king pin is 15.5 Hz which is very close to the frequency of vehicle shimmy peak. (The vehicle in the operation process, because of the changes of friction damper, the frequency of the vehicles will be slightly changed). Since the frequency 101 Hz of the lower arm (in Fig. 5) is much higher than shimmy frequency, the problems of this car is mainly triggered by the self-excited vibration due to the wheel shimmy around the king pin. And the vibration of the arm is caused by the forced vibration.
4 Problem Identification and Authentication
It is because of the self-excited vibration of the wheel to cause the steering wheel shimmy. Adding more lateral stiffness of the turning wheel reduces the wheel self-excited amplitude values. From Fig. 5 of the ODS test, it is found the lower arm and wheels are of great relevance. It is necessary to check whether or not the wishbone bushing stiffness meets the design requirements. In the vehicle status, the differences of bushing can only be exanimated in the hardness test. To check the result (in Table 2) shows that the bushing hardness of arm under point A doesn’t meet the design requirements.
After the qualified parts replaced the modal frequency of wheel steer increases from 15.5 to 17.5 Hz. The steering wheel shimmy is basically eliminated, as shown in Fig. 9.

The effect of the bushing modified
5 Conclusion
This chapter introduces the shimmy transmission path of steering wheel, and the diagnosis methods for the problem of shimmy. Combining with a typical cases respectively, the detailed analysis was carried on the balance wheels, steering system sensitivity analysis, suspension system ODS and modal analysis. Eventually the root causes of the shimmy in car are demonstrated that the unqualified parameters of the wishbone bushing result in the cancellation of the oscillation, thus create the serious steering wheel shimmy.
References
Kovacs AP (1998) Computational vibration analysis of vehicle shimmy by a power -work method. Veh Syst Dyn 29(6):341–364
Kimura T et al (1996) Analysis of steering shimmy accompanied by sprung mass vibration on light duty truck 3 fundamental mechanism. JSAE Re0076 17(3):301–306
Demic M (1996) Analysis of influence of design parameters on steered wheels shimmy of heavy vehicles. Veh Syst Dyn 26(5):343–379
Stepan G (1991) Chaotic motion of wheels. Veh Syst Dyn 20(6):341–351
Li juan H, In-ye L et al (2008) A simulation study of the self-excited shimmy for automobiles with dependent suspension. Comput Simulation 25(2):269–273
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Min, F., Wen, W., Zhao, L., Yu, X., Xu, J. (2013). Shimmy Identification Caused by Self-Excitation Components at Vehicle High Speed. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 201. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33832-8_2
Download citation
DOI: https://doi.org/10.1007/978-3-642-33832-8_2
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33831-1
Online ISBN: 978-3-642-33832-8
eBook Packages: EngineeringEngineering (R0)