
Abstract
Parking mechanism is a critical safety device in automatic vehicle transmission. Its safety features give a good indication of safety performance of AT vehicle. This chapter takes the parking mechanism on 7-speed dual clutch transmission as an example, uses kinematics theory to analyze difference of travel times between parking pawl and parking gear. In order to verify the safety performance at high speed parking, a rigid-flexible coupling multi-body dynamic model is established with ADAMS software, based on which the non-linear analysis is conducted to key components of the parking mechanism with peak impact load at high speed parking as input. In addition, through combining mechanics theory and kinematics simulation, the critical friction coefficient is estimated from the aspect of self-locking performance, which serves as references for future design of parking mechanism.
F2012-C02-015
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Parking mechanism
- Difference of movement time
- Self-locking performance
- Impact load
- ADMAS
- Parking at high speed
- Critical friction coefficient
1 Introduction
Parking mechanism is a critical safety system in automatic transmission. It is designed to break the vehicle reliably on a specific position or even on slope, and its safety performance is one of vehicle evaluation indicators. With the rapid development of the automotive industry, the method to combine theoretical analysis and computer simulation [1, 2], has been widely used on vehicle transmission research. However, due to lacking of auto transmission research in China, the research on Auto transmission parking mechanism is also conducted much less.
Using the parking mechanism of 7-speed dual clutch transmission as an example, this chapter analyzed the movement time difference between the parking pawl and the parking gear based on the kinematics theory. In addition, the rigid-flexible coupling multi-body dynamic model is established with ADAMS and Pro/e software and the peak impact load under high speed ratcheting was found by simulation. This load is taken as the input condition to conduct nonlinear finite element analysis on key components of parking mechanism with considering of material nonlinearity and contact nonlinearity, to verify the strength of parking mechanism components under high speed ratcheting. Through a combination of mechanics theory and kinematics simulation, the critical friction coefficient of key components is analyzed. Consequently, the self-locking safety performance of parking mechanism is validated, which can serve as a reference for the design of future parking mechanism.
2 Saftey Performance Analyses for High Speed Parking Condition
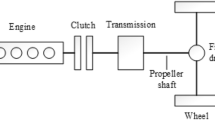
The structural layout of the parking mechanism of a 7-speed dual clutch transmission is shown in Fig. 1. If the vehicle is traveling at high speed, the gear shift bar is placed in P position unintentionally the parking mechanism shall not engage with the vehicle drive system to prevent vehicle braking suddenly. There are two requirements for the parking mechanism: first, in the condition of high speed (normally above 8 km/h), the parking pawl and parking gear will not engage even the gear shift bar is placed in parking position [3, 4] and parking pawl will be flicked; second, when the parking pawl is flicked by the parking gear, the parking mechanism should withstand the impact load. The strength of parking mechanism components must be ensured.

Sketch layout of parking mechanism of 7-speed dual clutch transmission. 1 Detent spring, 2 Detent lever, 3 Cam collar, 4 Support pin, 5 Ratcheting spring, 6 Parking pawl, 7 Pivot shaft, 8 Torsion spring, 9 Parking gear
2.1 Kinematics Theory Analysis of High Speed Parking Performance
During the shift process of the parking mechanism, the parking pawl rotates around the pivot shaft whilst the parking gear rotates differential shaft. The movement diagram of the parking pawl and the parking gear is shown in Fig. 2. The travel of parking pawl from top face of parking gear to the chamfer corner of parking gear is considered as the effective engagement of parking pawl and parking gear. As shown in Fig. 2a, i.e. if Point A of parking pawl moves to below Point B of parking gear, parking pawl and parking gear is engaged and vehicle is brake.

Movement process of parking pawl and parking gear
When the gear box T bar is shifted from R to P position, the forces acted on the parking pawl is as shown Fig. 3. Due to force Fc (from cam collar to parking pawl), the parking pawl has angle acceleration \( \varepsilon. \) The force balance equation is:

Force analysis of parking pawl
If the rotating angle of parking pawl is \( \varphi \) for it to engage with the parking gear, and the travel time of parking pawl is T1. Then,
As the parking gear is connected to the differential shaft in the transmission, so the rotating speed of parking gear is the same as vehicle wheel speed. If the space of parking gear teeth is S2 and vehicle speed is V2, and then it takes time T2 to pass one space of parking gear. Thus,
△ = T1−T2. △ is the difference of travel time between parking pawl and parking gear. When △ > 0, the parking pawl and parking gear could not engage effectively and the parking function could not be achieved by parking mechanism; when △ < 0, the parking pawl and parking gear could engage effectively and the parking function could be achieved.
According to the analysis above, if vehicle runs fast with high speed of parking gear rotation, parking pawl would hit and slide on the top surface of parking gear and then the parking brake function cannot be realized. According to the calculation, the critical parking speed is 4 km/h. It means if vehicle runs at speed of over 4 km/h, then parking mechanism of 7-speed dual clutch transmission should not achieve the parking function. And in theory, this structure design of parking mechanism can satisfy the requirement of high speed parking performance.
2.2 Simulation Analysis of High Speed Parking Performance
2.2.1 Establishment of Dynamic Model
Rigid-flexible coupling multi-body dynamic model is established with software of ADAMS, Pro/e and HyperWorks [5, 6], in order to conduct kinematics simulation of impact load of parking mechanism in the condition of high speed. Taking R Position of parking mechanism as the initial position, a rotating speed on detent lever rotating center is set, the shift process is simulated, shift time is 0.5 s and the time of totally simulation is 20 s. According to the principle of kinetic energy conservation, the vehicle mass can be converted into equivalent moment of inertia on parking gear as shown at formula (4),
where, \( \omega \) is the angle speed of parking gear, n is the number of components, \( v_{st} \) is the velocity at the mass center, and the estimated equivalent moment of vehicle mass is 262.735 kg*m2. And the dynamic model of parking mechanism is shown as Fig. 4.

Dynamic model of parking mechanism
2.2.2 Impact Load Analysis in High Vehicle Speed
A vehicle has two driving directions: reverse and forward. The impact load is analyzed for critical components, with vehicle speeds of 7, 10 km/h in reverse direction and speed of 7, 10, 15, 30, 60, and 100 km/h in forward direction. According to kinematics simulation, the peak impact load among key components (parking pawl, parking gear, cam collar and support pin) increases gradually with the increase of vehicle speed. The relationship between vehicle speed and peak impact load is shown as Fig. 5.

Peak impact load among key components of parking mechanism
In different vehicle speeds, the peak impact load of key components of parking mechanism is listed in Table 1.
2.3 Strength Check of Key Components in High Speed Condition
2.3.1 Method of Finite Element Contact Analysis
Working process of parking mechanism is one of contact issues. In order to solve this contact issue, the contact algorithm of enhancement Lagrange based on constraint is used to find out exact Lagrange multipliers, namely contact force. Enhancement Lagrange algorithm is a prolongation of penalty function [7], which combines the advantages of Lagrange multiplier algorithm and penalty function algorithms. Penalty function algorithm is brought into Lagrange multiplier, thus, enhancement Lagrange algorithm can accurately meet constraint condition and ensure coefficient matrix of equation to be positive and definite. As a result, it can not only improve constringency of contact issue, but also can improve precision of penalty function [8].
2.3.2 Simulation of Parking Mechanism in High Speed Situation
For FEA (Finite Element Analysis), the worst peak impact load at 100 km/h vehicle speed is used as input. FEA is conducted for important component of parking mechanism. Heat treatment of all key components is tempered and carburized, with surface hardness approximately 60HRC and the core hardness 35HRC–45HRC. Thereby, combining the material non-linear, contact analysis is done on parking pawl, parking gear, cam collar and support pin. The detailed FEA results of these key components were shown in the Fig. 6.

FEA result of key components in parking mechanism
The strength of contact surface will not be considered for distortion of contact load on contact surface. Compared the design strength with FEA result of parking mechanism components and it is shown in Table 2. At speed 100 km/h of impact loading condition, all key components of parking mechanism can meet the strength requirement.
3 Analysis of Self-Locking Performance of Parking Mechanism
3.1 Theoretical Analysis of Self-Locking Performance of Parking Mechanism
Assume the pulling out force from P position to R position with vehicle on slope is zero, self-locking performance of parking mechanism can be estimated. And the pulling out force of P position is decided by the forces between cam collar and support pin and parking pawl. In the condition of 30 % grade, force analysis of cam collar is shown in the Fig. 7 and calculation for the force is shown as formula (5):

Forces analysis of cam collar
Where, TGS is the pulling out force from P position to R position on the vehicle gears selector, Fc is the force between parking pawl and cam collar, Ff is the friction force, Ff = \( \mu \) Fc, \( \mu \) is the coefficient of kinetic friction between these two components, \( \theta \) is the design geometric angle and it is 5.4°.
Therefore, in order to achieve self-locking performance, the design coefficient of kinetic friction of parking mechanism in this 7-Speed dual clutch transmission should meet the requirement in formula (6),
3.2 Self-Locking Performance Simulation Analysis
With P Position set as the initial position for parking mechanism of auto transmission, the similar rigid-flexible coupling multi-body dynamic model is established with ADAMS and Pro/e software, and the equivalent torque as vehicle mass is imposed on parking gear. During dynamical analysis, friction coefficient between cam collar and support pin and Parking Gear is reduced gradually, until cam collar moves, and then it can be considered the parking mechanism losing its self-locking function. Through simulating analysis, when static friction coefficient is set as 0.13 and 0.14 respectively, the relationship between displacement of cam collar L (mm) and simulation time t (s) is shown in Fig. 8.

Relationship between displacement of cam collar and simulation time
From the result of simulation analysis, the critical static friction coefficient of self-locking performance is 0.14. Generally, kinetic friction coefficient is about 0.03–0.06 smaller than static friction coefficient, so the critical coefficient of kinetic friction is about 0.09, which complies with the result obtained by kinematics simulation and theoretical analysis.
According the above analysis, kinetic friction coefficient of this parking mechanism should be designed to 0.1. Thus, the surface roughness Ra between cam collar and parking pawl and support pin is all designed to 1.6, and then the self-locking safety performance of parking mechanism can be ensured.
4 Conclusions
Firstly, according to the structural design of parking mechanism structure, the maximum parking speed is 4 km/h. Basing on the travel time difference between parking pawl and gear, a rigid-flexible coupling multi-body dynamic model is established with ADAMS software. The peaking impact loads among key components under different abuse R to P test speeds were obtained.
Secondly, the parking mechanism can satisfy safety requirement under worst abuse test speed of 100 km/h based on the FEA results of critical components under the peak impact load.
Thirdly, the critical kinetic friction coefficient of parking mechanism is analyzed by the two aspects of structure design and simulation of ADAMS software. The value of kinetic friction coefficient is approx. 0.1. According to these analysis results, the roughness of cam collar, parking pawl, support pin is designed to meet to insure self-locking safety performance of parking mechanism about 7-spped dual clutch transmission.
References
Salam Akanda MA, Reaz Ahmed S (2002) Stress analysis of gear teeth using displacement potential function and finite differences. Int J Numer Meth Eng 53:1629–1640
Kleemola J, Lehtovaara A (2007) Experimental evaluation of friction between contacting discs for the simulation of gear contact. Tribotest 13(1):13–20
Gabriel MG (1994) SAE transmission/axle/driveline forum committee. Design practices: passenger car automatic transmissions. Soc Automot Eng Inc 3:15–17
Lechner G, Naunheimer H (1999) Automotive transmissions [M]. Springer, New York, p 2
Wang G, Zhang J, Ma R (2002) Dummy sample technology and its application on ADAMS[M].Xi’an. Publishing Company Of Northwest Industry University, pp 10–14
Chen L, Ren W, Zhang Y, et al. (2005) Dynamic analysis of mechanical system and application tutorial of ADAMS [M]. Publishing Company of Qinghua University, Beijing, pp 52–62
Chen W, Chen G (2007) Nonlinear complementarity model and nonsmooth algorithm about frictional contact problem. Scientific Annals
Bazaraa MS, Sherali HD, Shetty CM (1993) Nonlinear programming: theory and algorithms [M]. Wiley, New York
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Fu, L. et al. (2013). Research on Safety Performance for Parking Mechanism on a 7-Speed Dual Clutch Transmission. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 193. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33744-4_15
Download citation
DOI: https://doi.org/10.1007/978-3-642-33744-4_15
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33743-7
Online ISBN: 978-3-642-33744-4
eBook Packages: EngineeringEngineering (R0)