
Abstract
State forest administrations in Central Europe have to adapt to future climatic and socioeconomic conditions. This results in new demands for up-to-date and precise forest information—especially with regard to the increase of forest damages by natural hazards. Remote Sensing techniques are appropriated for delivering information in support of such tasks. We present details of a research project that focuses on the demonstration of the potential of satellite data for forest management planning and disaster management. Integrated in the over-all concept of a decision support system (DSS) for the forest–wood chain (Entscheidungs-Unterstützungs-System Forst-Holz, EUS-FH), the frame conditions for a ‘Remote Sensing based Inventory and Monitoring System’ for the forest-wood chain are developed. Particular focus is on investigations towards synergistic and complementary use of the two German satellite systems RapidEye and Terra SAR-X. The comparison is done on base of the accuracy of parameter derivation with each of the systems. The results deliver a couple of arguments for combined multispectral and SAR data use for monitoring and fast response situations in case of sudden calamities. But it reveals as well that the references against the results should be compared and, at the end, which represents the data layers to be updated, do not always fit from both, the semantic meaning e.g., the definition of ‘forest’ to cartographic differences, and the representation of object categories. Harmonisation of definitions and categories to be mapped is needed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Synthetic Aperture Radar
- Synthetic Aperture Radar Image
- Synthetic Aperture Radar Data
- Ground Sampling Distance
- Very High Resolution
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Worldwide forest resources are affected by global change phenomena. In connection, Central Europe state forest administrations have to adapt to future climatic and socio-economic conditions. The Bavarian forest sector is faced with a situation where climate change effects seem to destabilize forest ecosystems, the socio-economic demands on the ressource "forest" are continuously increasing and budgets for managing forests are cut. Significant biotic and abiotic calamity frequency increases are attributed to climate change. More than 30 % of the annual workload of a forest enterprise in Bavaria is in response to such unpredictable events. The different functions of a forest are more and more understood as social benefits and claimed by the society in the sense of stakeholder rights. In addition, national and international reporting duties are to be fulfilled by the owners and/or governmental bodies. To cope with all these diverse tasks a decision support system (DSS) (Entscheidungs-Unterstützungs-System Forst-Holz, EUS-FH) was designed for the forest-wood chain. An assessment study performed to figure out the needs of forest practitioners in forest management resulted in a list of parameters. The highest relevance was assigned to the parameters forest area, gaps, forest border length, forest changes, tree species groups, stand/tree height, and forest densities. These parameters should be updated timely for a sound decision support system (Felbermeier et al. 2010).
Amongst others, a major trigger of the activities toward such a DSS is the improved quality of the new class of high-resolution satellite imagery. Hence, current research and development deals with the opportunities of a ‘Remote Sensing based Inventory and Monitoring System’ for the Bavarian forests. The concept is based on the idea of integrating existing data offered by official sources such as: the Bavarian Surveying and Geoinformation Administration (LVG), the Bavarian State Forest Administration and others along, with remote sensing data as the most actual information layer. The geodatabases provide the ‘a-priori’ information used for restricting the solutions of the image analysis process and the results are used to update these databases. The system should be able to steer management operations and especially to support management decisions at the strategical/tactical level of a forest enterprise. At the final stage, the information system should contribute to facilitate the diverse national and international reporting duties as well.
This general approach became possible due the improved capabilities of the new generation of high-resolution and fast-revisiting remote sensing satellite systems (e.g., RapidEye, WorldView-2, TerraSAR-X, Cosmo-SkyMed soon ESA's Sentinels). The presented research is funded by the Federal Ministry of Economics and Technology, within a program of the Space Agency of the German Aerospace Center (DLR). The program aims to promote the synergistic use of optical and radar satellite data with special emphasis to the new German systems RapidEye (RE) and TerraSAR-X (TS-X). Taking into consideration the high revisit frequency and the large area covering capability of RE, an annual update of the forest databases for whole Bavaria is likely possible. The clouds and daytime independent operation ability of the TS-X system should help, especially in the calamity case to identify the affected areas. Such a fast response capability should allow starting preventive measures within a short time and such reducing the following damages and economic losses. Apart from these basic expectations, the determination accuracy of forest parameters with each of the systems is in the focus of the project. From multi-seasonal RE data, an improvement of tree species differentiation is expected. While the prospect of high spatial resolution TS-X data is an improvement in structure parameter determination such as heights, canopy roughness, border and gaps or even single tree detection. Within the present project stage, the under development system components should demonstrate the continuous data flow required for the future operational system.
2 Previous Work
Forest mapping by remote sensing is done from the global to the local scale. Systems, mapping scale and aims are different. Remote sensing as an operational tool is established on the global and the local scale. On global scale, particular parameters like the forest coverage and the derived variables such as: biomass, LAI, CO2-sinks and radiation budget, etc. are of high interest. The target is either the small scale documentation of forested areas or the derivation of input variables for models; the scale is of 1:250.000 and less.
On local scale, very high resolution (VHR) systems are required. The data usage is primarily for orientation (orthophoto) and in support of management actions. Aerial photographs and since a couple of years LIDAR (Light Detection and Ranging) are the most frequently used systems, followed by Quick Bird type satellite data. Mapping scales in the range of 1:10.000 and larger are targeted.
In between, at the regional to continental level with typical mapping scales of 1:25.000–1:250.000, the implementation of remote sensing methods in operational applications is still missed, at least in Germany. The concept of the 3rd National Federal Forest Inventory 2011/12 for Germany is not considering remote sensing data as information source. Nevertheless, there are a couple of studies demonstrating the potential of using the high resolution data type, e.g., for continental mapping purposes (FIRS, Corine) but for national inventories (2nd National Forest Inventory of Germany) or FAO’s AfriCover concept.
This section provides an overview on forest related information extraction concepts and methods. First, a brief overview about standard Bavarian State forest inventory concept is given, followed by optical and microwave based mapping methods.
2.1 Bavarian State Forest Inventory Concept
The Bavarian State forest administration inventory concept is based on a permanent regular sample point grid net. The inventories should provide an overview over the area managed by an enterprise. The envisaged update frequency is of about 10 years, an expansion up to 12–15 years is not a singularity. Each inventory point represents a forest area of 2–4 ha. The sample point area is differentiating an inner circle of 31,25 m², a mid-circle of 125 m² and an outer circle of 500 m². Inside the inner circle all trees with a diameter breast height (dbh) <11 cm are registered, in the mid circle trees with dbh between 11–29 cm and in the outer circle all trees with dbh >29 cm. At least the parameter tree species, dbh, tree height, crown closure, timber stock, stand structure are measured or registered and the regeneration is estimated (Anonymous 2001; Knoke et al. 2012)
Typically, one year after an inventory the forest operations for the next period are planned. For forest planning, orthophotos are used for steering the ground survey. The produced management maps display the established new stand borders, forest operations planned for the next period, forest functions and special treatment areas as well as single trees like standards, seed trees, clearing rests. Tree species share per stand, age, condition, etc., are mentioned in the tabular records and associated comments. Interim inventories for forest status assessment, wildlife damages, vegetation status assessments, etc., are performed supplementary.
2.2 Forest Mapping by Very High Resolution Systems
Traditionally, in Bavarian forest, aerial photographs are used in support of inventories, for management planning and monitoring. In most cases, aerial photographs are visually interpreted, in special cases by using 3D analyser for a map output (Rall and Martin 2002; Heurich 2006). In practice, orthophotos are mostly used for orientation and direct decision support in the field. Since a couple of years digital analytical work stations are used to extract forest relevant parameter for special cases like inventory and monitoring of Natura 2000 plots. As well as, for forest status assessment and mountain forest monitoring (Seitz et al. 2011; Waser et al. 2008). The LVG is covering the whole area of Bavaria with digital aerial photographs every three years.
Since about two decades, LIDAR systems are in the focus of forest research. LIDAR is the most accurate system in tree height and crown size determination. As full waveform system, a tomography like insight into forest canopies is possible, delivering information on the vertical structure of forests (Heurich 2006, Reitberger et al. 2008a, b). Recent research presented solutions for single tree identification even when crowns are interlaced (Reitberger et al., 2009). The 1 m, 2 m and 5 m grid digital terrain model (DTM) for Bavaria is based on LIDAR data. An update of that data base is not planned at present.
In the concept of the EUS-FH DSS, digital aerial photographs are used for base inventories of the Bavarian forests. Forest heights are derived by difference between the (VHR) LIDAR DTM and a digital surface model calculated from the digital aerial photographs of the LVG. VHR satellite data of the QuickBird type are not considered presently for forest parameter extraction by the Bavarian state forest administration.
2.3 Mapping by High Resolution Optical Systems
In general, high resolution optical systems means, the 5–30 m ground resolution category (e.g., Landsat type systems). The aims of forest related evaluations at this interim scale might be structured into: classification of forest cover (area), estimates of forest structure (tree species composition, age, height, etc.), forest change detection and forest growth simulations (management tool).
The trend in data analysis is toward parameters assessment. While typical classification results are strongly dependent on input data, classification method and operator experience, parameters may vary in accuracy of determination but the information is comparable. Further, a forest description on base of parameter is in line with forest management data and such facilitate modeling approaches like simulations of forest growth Pretzsch (2002 ) or calamity distribution dynamics (Kautz et al. 2011).
The pixel sizes of the high resolution category data type do not allow single tree detection and have always to be treated as mixed pixels. Fehlert (1984) by computer simulation and Kenneweg et al. (1991 ) by empirical experiments proved that in the range of the RapidEye ground resolution of 6,5 m a pixel wise classification must fail because of the mixed pixel problem. Object oriented analysis methods bypass this problem by using pixel aggregations as base objects for categorization (deKok et al. 1999; Schneider et al. 2000, Tiede et al. 2006, Eckert 2006). Already deKok et al. (1999) postulated, that for a monitoring system under Bavarian State Forest conditions it may be sufficient to rely on high resolution data to detect changes. Precondition is an established data and comparison base. Eckert (2006) demonstrated for a test site in Argentina with forests of similar complex structure like the ones we have to deal with in Mid-Europe, that high resolution data of different origin (Aster, Landsat) are appropriated to extract forest parameters with an acceptable accuracy for regional surveys. In Scandinavian countries, in Canada, etc. with extensive forest management systems the usage of high resolution data is standard.
In the present study, high resolution optical data are provided by Rapid Eye. The data are limited on the visible (VIS) and Near Infrared (NIR) spectral range, but firstly offer the option of multi-seasonal evaluations with a space operating system. The option of repeated observations under slightly changing appearances over the objects of interest is expected to bring advances in tree species identification and parameter determination.
2.4 Mapping by Microwave Systems
Synthetic Aperture Radar (SAR) remote sensing is an active imaging method based on microwave signals, which is—in contrast to optical remote sensing—independent of sun-illumination. Furthermore, the amplitude of the received signals is nearly free from atmospheric clutter (clouds, fog, etc.), so that SAR facilitates mapping tasks also under worse weather conditions. The high resolution of the new SAR satellite sensor generation (up to 1 m ground sampling distance) and the possibility of obtaining repeat and single-pass interferometric SAR (InSAR) data from multiple images make this data attractive for the extraction of both radiometric and geometric/structural parameters. Hence, SAR data are commonly used for purposes of classification, elevation extraction, and change detection.
Approaches of classifying forest areas using SAR data utilizing the possibilities of SAR polarimetry are given in Sato and Koike (2003) and Lee et al. (2005). The combination of SAR image data with optical or hyperspectral image data and Lidar data are investigated in Volden et al. (1998), Zhang et al. (2008), Hilbert et al. (2010), and Ackermann et al. (2010). Other evaluations detecting forest areas treat the analysis of SAR texture (Kourgli and Belhadj-Aissa 2009). In Kirscht and Rinke (1998), a method of reconstructing the 2.5 dimensional structure of elevated objects (e.g., buildings and vegetation like trees and forest) is described by utilizing their radar shadow length in airborne SAR image data.
Lemp and Koch (2009), analyzed forest areas by using TerraSAR-X image data. They focused on the problem of separating forest from grassland, which show similar backscatter intensity and statistics dependent on surface roughness, incidence angle and look direction. Furthermore, they state that an interferometric evaluation is impossible since the TerraSAR-X data show high decorrelation in forest areas. Therefore, a combined analysis of multi-frequency data (e.g., L-band and X-band images) is recommended. This problem of InSAR and PolInSAR phase decorrelation in repeat-pass datasets was also stated by Koch (2010), whereby for example, single-pass interferometry, facilitated by the TanDEM-X mission, could solve this problem.
In De Zan et al. (2009) multi-baseline InSAR data of this new TanDEM-X mission were simulated to show the high potential for height extraction. Already with few interferograms promising results of extracting height profiles in vegetated areas were achieved. One further method extracting tree and forest heights is provided by SAR tomography, for example by using airborne data (Reigber and Moreira 2000) or an upcoming satellite mission (Cloude and Papathanassiou 2008).
In this study, we use first high resolution repeat-pass TerraSAR-X data alone.
3 Parameter Extraction from RE and TS-X Data
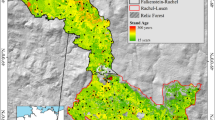
To consider various growth conditions the study covers different growth regions of Bavaria (Fig. 1).

Test site locations across the growth zones of Bavaria
The focus of the paper is on image analysis. The aim is to show which kind of forest parameters are extractable from the electro-optical RE data and the microwave TS-X data respectively and which accuracies are retrievable with each of the systems (complementarities). Due to the fact that data take opportunities for the first observation period 2009 fit neither the time frames nor the areas, the present paper highlights solely examples demonstrating the approach. Accordingly, the image analysis starts by independently processing the multi-spectral and radar data.
Due to the high geometric and orbital accuracy and resolution of the data, the prospect in our case is an improvement in forest structure parameter determination like heights, canopy roughness, border and gaps or, in special cases, even single tree detection. Improvements in tree species identification are expected by the multi-seasonal imaging option of RE. The key in this case are the changes due to phenology. The expectations are toward fingerprint like profiles of tree species types.
The presented results have to be seen as the entrance step for tree species differentiation. Solely the assessment of the first set of the above listed parameters is addressed. Examples are shown for the assessment of the parameter forest area, border length, gaps and forest tree groups ‘coniferous’, ‘broadleaved’ and ‘mixed’ as well as for forest height estimations and change detection options. These parameters are controlled by the pixel size and may be considered as ‘stable’ or ‘static’, at least over the period of one season.
3.1 Hypotheses
Hypothesis 1: Forest management relevant parameters are derivable from RapidEye and TeraSAR-X data. The hypothesis is tested on base of multi-seasonal RapidEye and TerraSAR-X data from up to five test sites in different growth regions of Bavaria.
Hypothesis 2: The combination of both data sets improves the forest determination. Each of the sensors has specific advantages in parameter extraction. The hypothesis is tested by combining parameter derivable exclusively from each of the sensors in a synergistic manner.
Hypothesis 3: The complementarities of the two sensor concepts facilitate fast reactions in the disaster case. The hypothesis is tested in the frame of change detection studies by comparing the potential of detecting structural changes with both systems.
3.2 Data
3.2.1 Geodata
Geodata are provided by the Bavarian State Institute of Forestry (LWF), the Bavarian Surveying and Geoinformation Administration (LVG), and the Traunsteiner Stadtwald community forest administration. The data layers used for first verification purposes are listed in Table 1.
The ATKIS-Basis-DLM is a digitized land cover model based on the Bavarian topographic map 1:25.000 with an accuracy of ± 3 m (Katzur and Franke 2007). It has the same information about land cover use as the map TN, which is based on cadastral data and digital orthophotos. FÜK is a product of the LWF and shows the property pattern of state, private and municipal forests of Bavaria.
3.2.2 RapidEye Data
The RapidEye satellite constellation consists of five satellites carrying on-board the push broom sensor Jena Spaceborne Scanner JSS 56. Each sensor is capable of collecting image data in five distinct bands of the electromagnetic spectrum: Blue (440–-510 nm), Green (520–590 nm), Red 630–680 nm), Red-Edge (690–730 nm) and Near-Infrared (760–880 nm). The dynamic range is covering 12 Bit, the ground sampling distance 6,5 m, resampled to 5 m pixels. At 75 km swath width, this constellation offers large area coverage and a frequent revisit interval of 2–5 days.
Radiometric and geometric corrected level 3A data were ordered to cover each test site at least five times across the vegetation period from spring to autumn. The delivered data sets for the 2009 vegetation period are listed in Table 2. The second vegetation period to be analysed was planned for 2011.
3.2.3 TerraSAR-X Data
SAR data were provided by the German TerraSAR-X satellite system. Due to the daylight independence and the nearly all-weather capability of radar systems the acquisition chance depends more on system workload than on weather conditions. The test site specific image parameters are summarized in Table 3.
Hence, we focused first on the recording of repeat-pass images to allow InSAR analysis and second on a temporal overlap with the RapidEye acquisitions to support the fusion purpose. The SAR images are recorded in Spotlight Mode, in HH polarization, with a wavelength of 31 mm (X-Band). The incidence angle θ varies between 27 and 49 degree and the geometric slant range resolution is about 1.2 m. In addition to the 15 images of 2010, for change detection purpose, new acquisitions in 2011 and 2012 are planned.
3.3 Methods and Results
3.3.1 Pre-processing of RapidEye Data
The multi-seasonal image analysis to be performed with the RE datasets requires a precise georectification as well as an atmospheric correction at the highest possible level. The accuracy of the geometric correction of the images was checked, and most of the images were spatially matched together in each test site. However, some of the images that did not match were corrected by applying specific amount of shift in both direction (easting and northing). The final achieved RMSE is below 0.8 pixel. The atmospheric correction was applied for all images in each test site, by using ATCOR 3, implemented in PCI Geomatica 10.3.
3.3.2 Processing of RapidEye Data
To extract forest parameters from RE data an object-oriented analysis technique was employed using eCognition Developer 8 program of the Trimble Company (Baatz and Schäpe 2000, Schneider et al. 2000). Two levels of segmentation were created, the upper level to delineate the forest areas and the lower level to extract the tree species groups. For the upper level of segmentation, scale parameter of 60 was chosen, while for the shape and compactness parameters 0.3 and 0.2 respectively. For the lower level, the parameters were set to 15 for scale, 0.2 for shape and 0.6 for compactness. In addition, layer weights were set to 5 for the NIR, 3 for the red edge, green and blue bands, and 1 for the red band.
The second step is the classification of the created objects. The set of features for classification was selected by the help of the feature space optimization tool implemented in eCognition. The first step of the hierarchical classification rule set was to separate the urban areas and the water bodies, by analyzing the NDVI and NIR layers in the upper level. Then the forest areas were classified as described in the following subsection. Afterwards, the lower level was segmented and classified into deciduous, coniferous and mixed forest stands.
3.3.3 Parameter Extraction from RapidEye Data
Forest Boundaries (border length and area): Due to the different land use and ownership of Bavarian landscape, the task to delineate the forest boundaries is of great importance. Within the study we tried thatfore to figure out which phenological stage is best suited for a forest boundary determination and, second, which is the improvement by a multi-seasonal analysis. Forest masks were created for each study area from each mono-temporal dataset, as well as from the combination of all the images multi-seasonal analysis. For the extraction of the forest areas in the mono-temporal analysis the layer of brightness, NDVI and the ratios Blue/Green were selected. While in the multi-seasonal analysis the brightness and the ratios Green/Blue were used.
The first attempt to verify the evaluation success on base of the forest management maps was not successful. Forest management maps are produced to support production, are restricted on enterprise areas and differ in content, accuracy and actuality. Nevertheless, with regard to a future operational phase the result assessment should be performed on basis of official map sources. Maps with forest area layers are produced by different authorities. The maps finally used for these comparisons are listed in Table 4.
The result of the error matrix between ATKIS-Basis-DLM, TN and FÜK illustrate that the overall accuracy of ATKIS-Basis-DLM is the best, quite close followed by TN. Fig. 2 shows the comparison of RE forest masks [a, b, c] of different vegetation stages. The combined or multi-seasonal evaluation [d] delivered the most accurate forest mask [f]. A visual example of the fitting of the produced RE masks with the ATKIS-layer is shown in examples [e, f].

Result of forest boundary extraction using RE image overlaid with mono and multi temporal extracted boundaries: forest boundaries from the images with date 22.04.2010 (a), 20.05.2009 (b), 27.07.2009 (c), RE image form 27.07.2009 overlaid with mono and multi temporal (d), RE image form 27.07.2009 overlaid with mono and multi temporal forest mask and ATKIS-Layer (e), orthophoto overlaid with multi temporal boundaries and ATKIS-Layer (f)
Extraction of Gaps: There are two forest gap types to be considered. Permanent unstocked areas e.g., wood storage and short term gaps due to clearance but calamities (storm throw, bark beetle attack, etc.). Especially the detection of the last category of gaps is of great importance for the DSS. The rule-sets developed for forest area determination have been expanded for a gap assignment rule (…surrounded by…). The evaluation of gap mapping success proved to be difficult. In general, there are no records on temporary gaps after clearings or disasters. Identification and delineation of gaps is such producing a new information layer. The results of the comparison against the ATKIS-Basis-DLM are displayed in Table 5.
Classification of Forest Types: The mono-temporal and multi-seasonal classification of the lower level of segmentation used the layers of Near-Infrared (NIR) and NDVI for the separation between the coniferous and deciduous tree stands. After first iteration, many objects were still unclassified due to the existence of the mixed stands in the area. Visually, most of these objects were identified as mixed forest or shaded areas. Eventually the shaded areas in the forest were classified by using the NDVI layer value into mixed forest and streets in the forests that was later on excluded from the forest area Fig. 3a.

Multi-temporal classification for the main tree species groups (a), and Forest stands with the percentage of deciduous trees in each stand according to the forest management records (b). Freising test site
As post classification step, the forest type classifications were grouped within the state forest stands borders in GIS. Whereas, the classification result was tabulated within the state forest stands borders using ‘tabulate area’ function in zonal tool in Spatial Analyst Tools of ArcMap environment. The result was a detailed description for each stand. Figure 3b shows the percentage of the deciduous and coniferous trees within each stand.
The different group of tree species; coniferous, deciduous and mixed forest tree groups were classified and compared with the ATKIS-Basis-DLM in an error matrix.
3.3.4 Evaluation of Parameter Extraction Success
According to the results of the official GIS-layer assessment, the ATKIS-Basis-DLM forest layer was chosen for verifying the performance of the mono- to multi-seasonal forest mask and the accuracy of the parameter extraction (Table 4). For this task an error matrix (Lillesand et al. 2004) was generated with a point raster for the entire study area in Freising, with a point spacing of 50 m (total points 15928) (Straub et al. 2008). Table 5 gives an overview about the accuracy of the parameter determination for each mono and the multi temporal dataset.
The overall accuracy for the parameter forest area shows the highest agreement with the ATKIS-Basis-DLM forest layer for the image from the 22.04.2010 (Table 5). The generated multi-seasonal mask and the mask from the 27.07.2009 data show quite similar agreements. Only the mask from the 20.05.2009 data set shows a 4 % lower agreement. These results demonstrate that even a mono-temporal forest mask may be sufficient for forest non-forest delineation.
The overall accuracy in Table 5 for all images shows a good result of gap detection, especially the multi temporal dataset has an accuracy of 99.11 % with the gaps of the ATKIS-Basis-DLM. Again, the multi temporal layer includes all different vegetation spectral patterns, hence a more precise detection of the gaps is possible.
First results of group of tree species classification have an overall accuracy between 66.11 % and 69.71 %. The KHAT index (Congalton 1991) of the error matrix has a value between 0.44 and 0.50. Several factors have an influence on the classification for example different vegetation stages of the trees, training areas, quality of the images and especially the verification data. Therefore, a better result will be expected, if the comparison is done by inventory data.
3.3.5 TerraSAR-X Data Evaluation
In comparison to optical data analysis, our SAR image analysis takes advantage of the higher geometric resolution of the imagery and focuses in particular on structural parameters. In the following subsection, the geocoding procedure is described—the most important step for fusion and assessment. Subsequently, several approaches of automatic extraction of forest parameters are described and first results are shown.
3.3.6 Preprocessing of TerraSAR-X Data
The side looking SAR imaging principle leads to a projection of the recorded intensity values in slant range geometry. For this reason, the image position of an object is characterized, on one hand, by the azimuth position parallel to the flight track and, on the other hand, by the range position representing the distance between SAR sensor and object on ground. Due to this cylindrical geometry, the SAR signature of objects is different to optical images, which are generally taken in central perspective and/or parallel projection. Consequently, the appearance of elevated objects is very different; a displacement towards the sensor’s nadir axis in SAR images and reversed in optical data (Thiele et al. 2006). Therefore, the requested fusion of the multi-sensor data, the assessment with GIS data, and the fusion of satellite images taken from ascending and descending orbits require a step of geocoding to achieve SAR information in world coordinate system. The correct geocoding, also called orthorectification, of a pixel in a SAR image can be determined based on the sensor carrier navigation data and the known distance between sensor and corresponding ground points. And hence, a good Digital Surface Model (DSM) including all elevated objects is required. Effects due to even small deviations of the navigation data from the true sensor position and missing height information in the elevation data are discussed in Thiele et al. (2006).
For this study, height models of different quality level are available, the “scene average height” extracted from the TSX metadata, SRTM data, a DGM5 and a DGM2 of the LVG. Additionally, high quality navigation data are delivered by DLR. The different results of geocoding overlaid with GIS information are shown in Fig. 4. As can be seen, the orthorectification results are reasonably good. For our purpose a high level of precision is requested, which can be better achieved by the use of the DGM5 and DGM2.

Result of geocoding using mean terrain height from SAR header (a), SRTM heights (b), DGM5 (c), and DGM2 (d). Freising test area, subset
3.3.7 Processing of TerraSAR-X Data
For the subsequent parameter extraction depending on the workflow, slant range as well as ground range images are used. Radiometry based steps are done in slant range geometry to avoid interpolation effects, high level steps and assessment steps are accomplished in ground range geometry.
3.3.8 Parameter Extraction from TerraSAR-X Data
Extraction of Forest Boundaries: The signature of forest in the SAR images is characterized by rather high average magnitude values, which is mainly caused by volume scattering. Furthermore, side-looking geometry of the SAR system and the height of the trees lead to the layover (l) phenomenon appearing at objects facing towards the sensor and the shadow (s) phenomenon on object parts hidden for the sensor.
For automatic segmentation and classification of forest areas, we select two information layers, the magnitude and the local coefficient of variation (CoV). The CoV layer exploits SAR image statistics, which is dominated by the speckle effect—a multiplicative noise well known for all coherent imaging systems. In detail, the CoV is the ratio of standard deviation and mean intensity in a local neighbourhood <I>(Eq. 1).
The local CoV is a good feature to distinguish between homogeneous and heterogeneous areas in SAR images with respect to the chosen window size (local neighbourhood). Different window sizes (see Fig. 5) are tested to differentiate between homogeneous vegetation (e.g., fields and grassland) and heterogeneous forest areas.

Input layers of forest boundary extraction in a subset of the Freising test area: magnitude layer (a), CoV layer with window size 5 × 5 pixel (b), 9 × 9 pixel (c), and 13 × 13 pixel (d)
The results are given in Fig. 6 showing an overlay of orthophoto and GIS layer. The visual assessment shows a good overlap between SAR boundaries and ATKIS layer. Differences are visible in the level of detail, in the classification of enclosed grassland, and the misclassification of some Agricultural land. An improvement is expected by decreasing segmentation level, which is currently limited by image size.

Result of forest boundary extraction of a subset of the Freising test area: SAR magnitude image overlaid with extracted boundaries (a), orthophoto overlaid with ATKIS layer (b), and orthophoto overlaid with extracted boundaries and ATKIS layer (c)
Extraction of Forest Heights: The extraction of forest heights focused on the analysis of the already mentioned layover and shadow areas at forest borders. Similar to optical data, where the illumination by sun leads to the shadow, also the length of radar shadow s slant contains information of object height. Furthermore, the length of the layover phenomenon (Bamler 2000) l slant leads to a nearly similar relation between incidence angle θ and object height h (see Eq. 2), which allows in some cases a redundant estimation of the object height.
Next to the “simple” height estimation, more complex height relations can be analyzed due to growing situations visualized in Fig. 7. Deciduous trees in near range appear bright in the magnitude profile due to the high volume scattering. Behind them, a short shadow part can be observed caused by the height difference between deciduous trees and following conifers. Subsequently, the lower volume scattering of conifers leads to lower magnitude values in the slant range profile. The shadow area afterwards corresponds to the conifer height. With the assumption of nearly homogenous height distribution in small areas of same tree species, for this example the extraction of conifer and deciduous tree height is possible. Of course, competitive effects such as gaps, stands, clear-cut rests, or spurious shadow areas hamper height extraction by this method.

Magnitude signature of deciduous trees and conifers and red marked slant range profile (a), slant range magnitude profile crossing deciduous trees and conifers (b), and scheme of backscattering situation for given profile (c). Bavarian Forest test area
Besides this theoretical description of height extraction, our initial work focused on the comparison of layover and shadow measurements. Therefore, manual slant range measurements are accomplished in a forest area covered from ascending and descending orbit to achieve the mentioned redundant estimations. Furthermore, temporally correlated field measurements were realized. A magnitude image marked with the calculated tree heights is shown in Fig. 8. In Table 6, the estimated and the measured heights are listed.

SAR magnitude image with marked locations of height estimation, Bavarian Forest
The measurements based on the layover areas (l) show higher differences to the ground truth measurements than the ones based on shadow areas (s). In most cases, heights extracted from SAR images are underestimated, which can be contributed to the partial penetration of the tree crowns at the very top. A rigorous assessment between extracted and real measured height values is difficult. This is due to spurious shadow areas in the SAR images and large height variations at the real forest boundary. Nonetheless, the values of h9, h10, and dh10, show that the concept of combining relative heights (Fig. 7) fits quite well for this example. The implementation of a semi-automated and fully automated approach for forest height extraction is in process.
Estimation of Forest Density: In addition to the boundaries and the heights, the forest density is also an important parameter to describe forest characteristics. Forest density is related to stand age and gap occurrence. Next to the CoV layer, also a shadow layer, an intermediate result of the forest boundary extraction, is useful for this estimation. Especially, shadow areas enclosed from forest regions are a measure of gappy forest areas. As older the forest as more gaps occur and as rougher the surface appearance. Based on pyramid like changing of the segmentation level, the discrimination between open space, glades, gaps and gappy growth could be possible. Implementations toward density determinations for gap detection and age estimates are still in process.
Classification of Forest Types: The classification of different forest types is an additional task of this project. As first goal, discrimination into three classes—deciduous, conifer and mixed forest is envisioned. Therefore, three information layers are investigated, the CoV, the amplitude and the coherence. The local coherence Coh describes the correlation between two repeat-pass SAR images (S1 and S2), whereby high Coh values (~1) indicate coherent areas (e.g., urban area) and low Coh values (~0) independent signals due to high variation (e.g., vegetation).
A reasonable way to visualize the contained information is the CoVAmCoh-Analysis presented in Schulz et al. (2009). The three input layers shown in Fig. 9 are arranged like RGB layers, with CoV as red, amplitude as green and Coh as blue layer.

Input layers of classification; coefficient of variation (a), SAR magnitude (b), interferometric coherence (c), result of CoVAmCoh layer stacking (d). Freising test area, subset
The additive colour mixing emphasizes local features, for example, changes appear yellow, deciduous trees bright green, and fallow land blue. The eCognition software is a useful tool for multi-resolution segmentation. It is also useful for the fuzzy classification of the data based on suitable membership functions adapted to the three classes (deciduous, conifer and mixed forest).
4 Integration of RE and TS-X Evaluations
The integration of synergistic and complementarities options from both data types are considered of major importance for the DSS. Forest characterisation and change detection are presented as examples.
In Table 7 the ability of forest parameter determination of the two systems are weighted against the success of the most precise remote sensing method for this parameter. Solely, for the diameter at breast height (dbh), one if not the most important parameter in practice, no reference RS system is available, and a RS data based evaluation is not possible.
The analysis of Table 7 lets us easily identify the synergy potential between TS-X and RE. While the advantages of RE are in species differentiation, area coverage and costs, TS-X is adding information on stand height, gap detection, single tree detection (in some cases) and has no data take restrictions in the emergency case.
The complementarities are given for the parameters area, border length and gap detection, all of them parameters describing static structure elements. The simultaneous data take and evaluation of that data during the development phase allow to determine the assessment accuracy and to use that information in case only one data set is available (disaster scenario).
With regard to change detection, the high repetition frequencies of the two systems are the key properties, allowing the immediate detection after occurrence. In case of TS-X repeat-pass data allows the detection of changes, e.g., by evaluating the already mentioned coherence, which is a measure initially introduced to assess the quality of the phase stability of an interferogram. Since coherence is a very sensitive measure (see Fig. 9c), considerable noise is expected making it necessary to rely on segment-based approaches for classification. A priori information seems essential.
For RE changes related to shifts in phenologic development are investigated with the aim of tree species differentiation (instable parameter behaviour). The static parameters area, gaps, border length, tree species group distribution, etc. are accessible from each data take.
Within the DSS for the forest wood chain, the advantages of both system types are combined. For establishing the data base, the information is extracted from both systems (synergy). In the fast response case, the complementarities of information provision are used to get information about the event. The extracted information is cross checked with the established data base.
Figure 10 demonstrates the information flow within the DSS. Aerial photographs of the regular three year cycle of the Bavarian State survey are used to cross check and update existing forest data bases (10a). In the following winter season 2000/01 a storm event damaged large areas. According to the concepts of the DSS, satellite data should be analysed to decide whether a supplementary very high resolution data take is necessary for steering clearing measures. In our example from the Bavarian Forest test site, aerial photographs were taken in 2001 (10b) for bark beetle monitoring reasons. The damages of the storm throw from winter 2000/01 are still well displayed by the RE image from May 2009. The multi-seasonal classification is used to crosscheck and update the forest management records (c, d). Changes occurring between May and August 2009 are easily to be identified by an automatic change detection proceeding (e). Once the data base is regularly updated even in a fast response case under cloudy sky conditions the affected areas are detectable by SAR systems, in our example by TS-X (f).

Example of an information flow in the sense of the DSS for the forest–wood chain under development demonstrated for a subset of the Bavarian Forest test area. Aerial image from 2000 documenting the initial stage (a), aerial documenting damages after a storm event (b), RapidEye image May 2009 still reproducing the situation from 2001 (c), RapidEye image classification August 2009 (d), RapidEye image August 2009 with border line of changes compared to the situation in May (e), and TerraSAR-X proving no changes since August 2009 (f)
5 Discussion
Despite that the presented results are stated as preliminary, it is possible to give some statements and to give an estimate of the success.
Hypothesis 1: Forest management relevant parameters are derivable from Rapid Eye and TeraSAR-X data. Hypothesis was tested on base of multi-seasonal RapidEye and TerraSAR-X data. It was examined in up to five test sites of different growth regions characteristics in Bavaria, and it is likely to be stated as confirmed. The parameter derivation success is not as high as in case of the reference systems for that parameter (Table 7). However, results are sufficient to support the aims of the envisaged DSS for the forest-wood chain. These findings are in line with the findings of deKok et al. (1999).
Hypothesis 2: The combination of both data sets improves the forest determination. The investigations confirmed the hypothesis validity. Specific advantages in parameter extraction using data from both sensors are contributing to a more precise determination of the forest characterisation. As shown in Table 7, especially in case of gap detection and height estimates, TS-X is delivering more accurate results than RE. While RE is contributing with a better stand structure description, at present confirmed solely at the tree species group level, but with a prospect of tree species differentiation. Nevertheless, because it was not possible to evaluate the data sets taken at the same period of time, this hypothesis needs to be further investigated before it is categorized as ‘proved’.
Hypothesis 3: The complementarities of the two sensor concepts facilitate fast reactions in the disaster case. The concepts leading to hypothesis 3 assume that even small changes are detectable, once the data base is established and regularly updated by evaluating the same RS data type sets. Change detection is required, either to compare the changes over years or in case of a clearly defined situation of a sudden event like a storm throw or a biotic calamity. In the concept of the DSS for the forest wood chain, such a calamity should be detectable by both sensor types. The microwave sensor can detect at any daytime or under any cloud coverage condition, while the optical sensor, which definitely requires clear sky conditions, is therefore not as flexible. On the other hand, systems like RE or later, ESA's Sentinel, are promising a high temporal repetition frequency and will be used to analyse the event further.
Whether the event was of a category that made it necessary to have a very high resolution imaging campaign is decided after crosschecking the classification results with the data base records. Once such an event is categorized as disastrous and the clearing urgency is high to very high, an additional data take with very high resolution systems like aerial photographs or LIDAR may be a cost efficient logistic option for steering the operations.
A data flow test confirming the hypothesis was performed with the presented change detection study at a test site in the Bavarian Forest (Fig. 10). A test case did not occurred during the reported period such the hypothesis cannot be finally confirmed.
Worth to be discussed are other findings of the study highlighting integration needs and bottlenecks of different nature affecting the success of the integration in the frame of the envisaged DSS. We will restrict the discussion on differences in recording the retrieved parameter and on pointing on the need of harmonisation of definitions.
In case of the tree species group differentiation task, forest management data bases are the only ones offering the required level of detail. Such data bases exist solely for forest areas with an administration, what applies on state forests, community forests and big private forest areas. One third of the Bavarian forests, about 800.000 ha belong to the ‘small private forest’ category and are covering areas not larger than 30 ha each. For such type of forests, the proposed system will be able to offer a consistent data base, of course not with that level of detail as for then the state forests with regular ground based inventories. However, even in case of the state forests and community forests with state of the art data bases the system under development will be of advantage. Such the records of the Bavarian State forest management data base are giving solely the percentage of forest tree species per stand, but not the position. The trend in forest planning is to larger and even larger stands and longer inventory cycles. The object based classification applied for this study is deciding per object. One object is defined by homogeneity criteria and is in general associated to a tree species type of comparable age. The percentage per stand is calculated by summing up the objects belonging to the respective stand. The position of each object is exactly known. This is a big advantage compared to the forest management records. Growth simulators are more and more used as planning instruments in forest management, allowing assessing different alternatives and their consequences. Especially growth simulators acting on base of competition models like SILVA (Pretzsch et al. 2002) will take advantage from this additional information in the future.
The need of harmonisation became already obvious at a very basic stage of the discussion: Which is the appropriated and generally accepted definition of ‘forest’, or, on the practical side, which ‘official’ forest layer should be used to compare the results? Even in the same county, in our case Bavaria, different authorities and administrations e.g., for forestry, nature conservation, the Bavarian State survey, etc., established their own data bases using different definitions for ‘forest’. Following the most intuitive idea to use the forest management maps, the sources on which the decisions in forestry are based on, one must fail because the forest border is defined by the stem position. Remote sensing data derived results are crown projection controlled. For old growth broadleaved forest, this simple difference may introduce a positioning error for forest borderline determination of 10 m and more once that map is used as reference for validating RS derived results. Of course, this has consequences for forest area determination as well. Some other official sources like ATKIS do not consider the forest management road network. The dense Bavarian State forests road network must be subtracted before this data set is used as reference.
The discussion may be continued on different other topics. The study clearly reveals that there are many ‘interface’ problems to be solved until an operational solution may become possible. These problems do not directly touch the remote sensing and data evaluation context.
6 Conclusion and Outlook
The results presented above show the current state of implementation and are thus preliminary in some sense. The extracted parameters indicate the potential of Remote Sensing to support the forest-wood chain but their values should be considered as an initial feasibility test after putting together all the relevant imagery and geodata needed for the analysis. Nevertheless, it is possible to derive some conclusions about the concept itself and about the remote sensing data investigated as well.
The optical RapidEye data belong to the high (5–30 m), the SAR TerraSAR-X data are on the transition to the very high (0.5–5 m) spatial resolution class. Different to LIDAR or digital aerial photography techniques single tree observations are not possible. Exceptions are solitary trees or standards left for seed production or shading. After the presented first results we are far away from claiming a ready to use solution for practice, However, the results deliver a couple of arguments for the combined use of multispectral and SAR data for monitoring and fast response situations like sudden calamities.
The concept seems appropriate to deliver management relevant information useful for interim inventories. Such interim inventories are not intended to deliver all detailed information of a regular inventory cycle. However, they should help to give an overview about the main parameter, such as:
-
Tree species distribution (e.g., coniferous/broadleaved/mixed)
-
Changes in area coverage (e.g., the conversion of stands after felling or as result of calamities)
-
Management measures
-
Information on stand structure parameters (e.g., number and position of standards, gaps and tree type mixture—single tree mixture, group wise)
-
Information needed for the strategically/tactical planning level of a forest enterprise.
Most, if not all, of these information are retrievable more or less automatically from data sets like those offered by a combination of microwave and multispectral data. Again, not necessarily with a quality as that required for decision making, but surely with a sufficient accuracy for decision support and fast response actions!
In the context of global change phenomena, especially the observed increase of frequency and intensity of calamities, the presented combination of microwave and optical systems of the very high to high category seems well appropriated for fast reaction emergency systems all over the world. While the microwave system is delivering the first information about the extent of an event, without being hindered by clouds or daytime, the optical system will deliver the details needed for reconditioning logistics in forestry. A basic point in this context is an already existing GIS data base of the forests, allowing the fast assessment of the changes.
Still an open question is how to connect the results with existing concepts and especially the task of harmonisation of definitions hindering an integration of remote sensing derived information in practice.
References
Ackermann N, Thiel C, Borgeaud, M, Schmullius, C (2010) Potential of fusion of SAR and optical satellite imagery for biomass estimation in temperate forested areas. In: Proceedings of the ESA living planet symposium, Bergen, Norway
Anonymous (2001). Waldgesetz für Bayern. 25. August 1982 (BayRS 7902-1-L): Letzte Änderung 22. Juli 2005 (GVBI 2005, 313).Bayerisches Staatsministerium für Ernährung, Landwirtschaft und Forsten (StMELF), München
Baatz M, Schäpe A (2000). Multiresolution segmentation—an opotimization approach for high quality multi-scale image segmentation. In: Proceedings of the AGIT-symposium Salzburg 2000, Vol XII. Salzburg, pp 12–23
Bamler R (2000) Principles of synthetic aperture radar. Surv Geophys 21(2–3):147–157. doi:10.1023/A:1006790026612
Cloude S.R, Papathanassiou K.P (2008) Forest vertical structure estimation using coherence tomography. In: IEEE proceedings of geoscience and remote sensing symposium, pp 275–278
Congalton RG (1991) A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens Environ 37:35–46
DeKok R, Schneider T, Baatz M, Ammer U (1999) Object based image analysis of high resolution data in the alpine forest area; In: Proceedings joint WSf ISPRS WG I/1, I/3 and IV/4: sensors and mapping from space 1999, Hannover, Sept 27–30
De Zan F, Papathanassiou K, Lee SK (2009) Tandem-L forest parameter performance analysis. In: Proceedings of international workshop on applications of polarimetry and polarimetric interferometry, Frascati, Italy, pp 1–6
Eckert. S. (2006): A contribution to sustainable forest management in patagonia—object-oriented classifiucation and parameter extraction based on ASTER and landsat ETM + data; Verlag des GeographischenInstituts der Uni. Zürich, Remote Sensing Series, Vol 45. pp S.154
Felbermeier T, Hahn A, Schneider T (2010) Study on user requirements for remote sensing applications in forestry. In: Proceedings of the ISPRS symposium TC VII, July 5–7, 2010, Vienna, Austria
Fehlert G-P (1984) Kalibrierung von MSS-Satellitenbilddaten zur Auswertung zeitlicher Reflexionsänderungen an Fichtenbeständen; DFVLR-FB 84–44
Heurich M (2006) Evaluierung und Entwicklung von Methoden zur automatisierten Erfassung von Waldstrukturen aus Daten flugzeuggetragener Fernerkundungssensoren. Forstliche Forschungsberichte München. 202/2006
Hilbert C, Schmullius C, Zink M (2010) Derivation of forest structure using satellite, multifrequent radar and lidar data in Thuringian Forest, Germany. In: Proceedings of silvilaser 2010, Freiburg, Germany
Katzur L, Franke W (2007) Qualitätssicherung bei der Bearbeitung der ATKIS®-Produkte. Vermessung Brandenburg, Heft 02:15–26
Kenneweg H, Förster B, Runkel M (1991) Diagnose und Erfassung von Waldschäden auf der Basis von Spektralsignaturen; In DLR Abschlußdokumentation—Untersuchung und Kartierung von Waldschäden mit Methoden derFernerkundung. Teil A, Oberpfaffenhofen
Kautz M, Dworschak K, Gruppe A, Schopf R (2011) Quantifying spatio-temporal dispersion of bark beetle infestations in epidemic and non-epidemic conditions. For Ecol Manag 262(2011):598–608
Kirscht M, Rinke C (1998) 3D reconstruction of buildings and vegetation from synthetic aperture radar (SAR) images. In: Proceedings of IAPR workshop on machine vision applications MVA”98, Makuhari, Chiba, Japan, pp 228–232
Knoke T, Schneider T, Hahn A, Griess VC, Rößiger J (2012) Forstbetriebsplanung als Entscheidungshilfe. Ulmer Verlag Stuttgart, p 408. ISBN 978-3-8001-7611-3
Koch B (2010) Status and future of laser scanning, synthetic aperture radar and hyperspectral remote sensing data for forest biomass assessment. ISPRS J Photogramm Remote Sens 65:581–590
Kourgli A, Belhadj-Aissa A (2009) SAR image classification using textural modelling. In: Proceedings of radar conference—surveillance for a safer world, Bordeaux, pp 1–6
Lee JS, Papathanassiou KP. Hajnsek I, Mette T, Grunes MR, Ainsworth T, Ferro-Famil L (2005) Applying polarimetric SAR interferometric data for forest classification. In: IEEE proceedings of geoscience and remote sensing symposium, Vol 7. Pp 4848–4851
Lemp D, Koch B (2009) Forest monitoring using TerraSAR-X data—evaluation of processing methods and first results. In: Proceedings of TerraSAR-X science meeting 2009
Lillesand T, Kiefer R, Chipman J (2004) Remote sensing and image interpretation. Wiley, New York, p 763. ISBN 13: 978-0471152279
Pretzsch H (2002): Application and evaluation of the growth simulator SILVA 2.2 for forest stands, forest estates and large regions. Forstwissenschaftliches Centralblatt 121(Suppl.1):28–51
Rall H, Martin K (2002) Luftbildauswertung zur Waldentwicklung im Nationalpark Bayerischer Wald 2001—Ein neues Verfahren und seine Ergebnisse zur Totholzkartierung. In: Berichte aus dem Nationalpark, Nationalparkverwaltung Bayerischer Wald 1 (2002)
Reigber A, Moreira A (2000) First demonstration of airborne SAR tomography using multibaseline L-band data(5). IEEE Trans Geosci Remote Sens 38(5):2142–2152. doi:10.1109/36.868873 (Part 1)
Reitberger J, Schnörr CL, Heurich M, Krzystek P, Stilla U (2008a) Towards 3D mapping of forests: a comparative study with first/last pulse and full waveform LIDAR data; the international archives of the photogrammetry. Remote Sens Spat Inf Sci 37:1397–1403 (Part B8)
Reitberger J, Schnörr CL, Heurich M, Krzystek P, Stilla U (2008b) Analysis of full waveform LIDAR data for the classification of deciduous and coniferous trees. Int J Remote Sens—3D Remote Sens For 29(5):1239–1242. doi:10.1080/01431160701736448
Reitberger J, Schnörr CL, Krzystek P, Stilla U (2009) 3D segmentation of single trees exploiting full waveform LIDAR data. ISPRS J Photogramm Remote Sens 64:561–574. doi:10.1016/j.isprsjprs.2009.04.002
Sato M, Koike T (2003) Classification of tree types by polarimetric Pi-SAR. In: IEEE proceedings of geoscience and remote sensing symposium, Vol 1. Pp 431–433
Schulz K, Boldt M, Thiele A (2009) COVAMCOH-ANALYSIS: a method to improve the interpretation of high resolution repeat pass SAR images of urban areas. In: Proceedings of SPIE, remote sensing for environmental monitoring, GIS applications, and geology IX Vol. 7478:747805—747809 74780 doi: 10.1117/12.830441
Schneider T, de Kok R, Buck A, Manakos I (2000) Objektorientierte Bildanalyse—Paradigmawechsel in der thematischen Auswertung von Erdbeobachtungsdaten ? In: Lehr-stuhl für Landnutzungsplanung und Naturschutz (2000): Landnutzungsplanung und Naturschutz. Aktuelle Forschungsberichte. Festschrift zur Emeritierung von Professor Dr. Ulrich Ammer. Freising, pp 234–258 ISBN 3-89685-564-6
Seitz R, Rappl A, Straub C, Troyke A (2011) Forstliche Fernerkundung an der LWF, AFZ-der Wald, 13/2011, pp 11–13
Straub C, Weinacker H., Koch B (2008) A fully automated procedure for delineation and classification of forest and non-forest vegetation based on fullwaveform laser scanner data. Int Arch Photogramm, Remote Sens Spat Inf Sci 37(8/11):1013–1019
Tiede D, Lang S, Hoffmann C (2006) Supervised and forest type-specific multi-scale segmentation for a one-level-representation of single trees. Int Arch Photogramm, Remote Sens Spat Inf Sci 36(4):C42 (Salzburg, Austria. http://www.commission4.isprs.org/obia06/)
Thiele A, Schulz K, Thoennessen U, Cadario E (2006) Orthorectification as Preliminary Step for the fusion of data from active and passive sensor systems. In: Proceedings of IEEE international conference on multisensor fusion and integration for intelligent systems, doi: 10.1109/MFI.2006.265629, pp 479–484
Volden E., Solberg AS, Huseby RB (1998) Forest classification using spectrometer and SAR Data. 1998 In: IEEE proceedings of feoscience and remote sensing symposium, Vol 5, pp 2732–2736
Waser LT, Ginzler C, Kuechler M, Baltsavias E (2008) Potential and limits of extraction of forest attributes by fusion of medium point density LiDAR data with ADS40 and RC30 images. In: SilviLaser 2008 8th international conference on LiDAR applications in forest assessment and inventory, Edinburgh, UK, Sept 18–19, 2008, pp 625–634
Zhang Z, Ni W, Fu A, Guo Z, Sun G, Wang D (2008) Estimation of forest structural parameters from Lidar and SAR data. Int Arch Photogramm, Remote Sens Spat Inf Sci 37:1121–1126 (part B8)
Acknowledgments
We wish to thanks the Federal Ministry of Economics and Technology, within a program of the Space Agency of the German Aerospace Center (DLR) for funding this research work presented under number 50EE0919 in the frame of the program on “synergistic use of RapidEye and TerraSAR-X data for applications”.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Schneider, T. et al. (2013). Parameter Determination by RapidEye and TerraSAR-X Data: A Step Toward a Remote Sensing Based Inventory, Monitoring and Fast Reaction System on Forest Enterprise Level. In: Krisp, J., Meng, L., Pail, R., Stilla, U. (eds) Earth Observation of Global Changes (EOGC). Lecture Notes in Geoinformation and Cartography. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-32714-8_6
Download citation
DOI: https://doi.org/10.1007/978-3-642-32714-8_6
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-32713-1
Online ISBN: 978-3-642-32714-8
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)