
Abstract
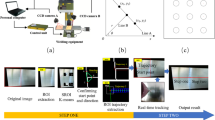
In robotic welding seam tracking based on visual information has been studied in the recent years. However, it is difficult to ensure the quality of images obtained in the welding process because it is easily affected by spattering, fuming and electromagnetic noise. The paper introduces a method to select useful images before further processing. Experimental tests are conducted to verify its accuracy.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Kim, J.W., Na, S.J.: Study on arc sensor algorithm for weld seam tracking in gas metal arc welding of butt joints. In: Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, vol. 205(B4), pp. 247–255 (1991)
Suga, Y., Naruse, M., Tokiwa, T.: Application of neural network to visual sensing of weld line and automatic tracking in robot welding. Welding in the World 34, 275–282 (1994)
Kuo, H.-C., Wu, L.-J.: An image tracking system for welded seams using fuzzy logic. J. Mater. Process. Technol. 120(1), 169–185 (2000)
Lee, S.K., Na, S.J.: A study on automatic seam tracking in pulsed laser edge welding by using a vision sensor without an auxiliary light source. J. Manuf. Syst. 21(4), 302–315 (2002)
Lee, S.K., Chang, W.S., Yoo, W.S., Na, S.J.: A tudy on a vision sensor based laser welding system for bellows. J. Manuf. Syst. 19(4), 249–255 (2007)
Micallef, K., Fang, G., Dinham, M.: Automatic Seam Detection and Path Planning in Robotic Welding. In: Tarn, T.J., Chen, S.B., Fang, G. (eds.) Robotic Welding, Intelligence and Automation, pp. 23–32. Springer, Heidelberg (2011)
Bae, K.Y., Lee, T.H., Ahn, K.C.: An optical sensing system for seam tracking and weld pool control in gas metal arc welding of steel pipe. J. Mater. Process. Technol. 120(2), 458–465 (2002)
Shen, H.Y., Li, L.P., Lin, T., Chen, S.B.: Real-time Seam Tracking Technology of Welding Robot with Visual Sensing. Journal of Intelligent and Robotic systems 59, 283–298 (2010)
Ma, H., Wei, S., Sheng, Z.: Robot welding seam tracking method based on passive vision for thin plate closed-gap butt welding. International Journal of Advanced Manufacturing Technology 48, 945–953 (2010)
Yan, Z.H., Zhang, G.J., Gao, H.M., Wu, L.: Weld pool boundary and weld bead shape reconstruction based on passive vision in P-GMAW. China Welding 15(2), 20–24 (2006)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Ye, Z., Fang, G., Chen, S., Zou, J.J. (2011). Image Selection Based on Grayscale Features in Robotic Welding. In: Deng, H., Miao, D., Lei, J., Wang, F.L. (eds) Artificial Intelligence and Computational Intelligence. AICI 2011. Lecture Notes in Computer Science(), vol 7004. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-23896-3_8
Download citation
DOI: https://doi.org/10.1007/978-3-642-23896-3_8
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-23895-6
Online ISBN: 978-3-642-23896-3
eBook Packages: Computer ScienceComputer Science (R0)