
Abstract
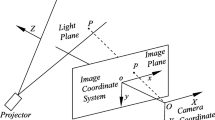
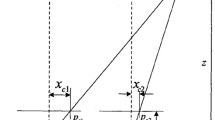
Since the spot is elliptical when the cylindrical laser irradiates on the spatial plane, the pose of the spatial plane can be described by the elliptical spot. At the same time, the laser spot in the CCD plane is also elliptical. The information of the spatial plane will include in the image ellipse. The monocular vision has been established, and the boundary equation is obtained by image processing, and the relationship is derived between the boundary equation and the pose parameters of the spatial plane by minimum mean-square method. In order to obtain the depth information of the spatial plane, the boundary equation of the cylinder laser is introduced as the constrained condition. Because the constrained condition is transcendental equation set which includes trigonometric function, SWIFT (sequential weight increasing factor technique) is adopted for solving the parameters of the spatial plane. The simulation results show that the algorithm proposed is effective and feasible.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Yamada, H., Togasaki, T., Kimura, M., et al.: High density 3-D packaging technology based on the sidewall interconnection method and its application for CCD micro camera visual inspection system. IEEE Transactions on Advanced Packaging 26(2), 113–121 (2003)
Goldberg, R.R.: Pose determination of parameterized object models from a monocular image. Image and Vision Computing 11(1), 49–62 (1993)
Fantoni, C.: 3D surface orientation based on a novel representation of the orientation disparity field. Vision Research 48(25), 2509–2522 (2008)
Achour, K., Benkhelif, M.: A new approach to 3D reconstruction without camera calibration. Pattern Recognition 34(12), 2467–2476 (2001)
Grovea, P.M., Gillamb, B., Onoa, H.: Content and context of monocular regions determine perceived depth in random dot, unpaired background and phantom stereograms. Vision Research 42(15), 1859–1870 (2002)
Aider, O.A., Hoppenot, P., Colle, E.: A model-based method for indoor mobile robot localization using monocular vision and straight-line correspondences. Robotics and Autonomous Systems 52(2,3), 229–246 (2005)
Qin, L.-J., Zhu, F.: A New Method for Pose Estimation from Line Correspondences. Acta Automatic Sinica 34(2), 130–134 (2008)
Roy-Chowdhury, A.K., Chellappa, R.: Statistical Bias in 3-D Reconstruction From a Monocular Video. IEEE Transactions on Image Processing 14(8), 1057–1062 (2005)
Frintrop, S., Jensfelt, P.: Attentional Landmarks and Active Gaze Control for Visual SLAM. IEEE Transactions on Robotics 24(5), 1054–1064 (2008)
Zhu, X.: Quick measurement algorithms of position and pose of spatial object by CCD images based on stereo vision and laser token. Chinese Journal of Mechanical Engineering 40(7), 161–165 (2004)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zhu, X., Zhang, Y., Li, L., Gao, L., Zhou, J. (2011). An Algorithm of Determining the Plane Based on Monocular Vision and Laser Loop. In: Deng, H., Miao, D., Lei, J., Wang, F.L. (eds) Artificial Intelligence and Computational Intelligence. AICI 2011. Lecture Notes in Computer Science(), vol 7004. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-23896-3_1
Download citation
DOI: https://doi.org/10.1007/978-3-642-23896-3_1
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-23895-6
Online ISBN: 978-3-642-23896-3
eBook Packages: Computer ScienceComputer Science (R0)