
Abstract
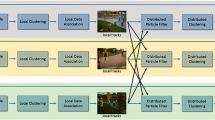
The current RoboCup Small Size League rules allow every team to set up their own global vision system as a primary sensor. This option, which is used by all participating teams, bears several organizational limitations and thus impairs the league’s progress. Additionally, most teams have converged on very similar solutions, and have produced only few significant research results to this global vision problem over the last years. Hence the responsible committees decided to migrate to a shared vision system (including also sharing the vision hardware) for all teams by 2010. This system – named SSL-Vision – is currently developed by volunteers from participating teams. In this paper, we describe the current state of SSL-Vision, i.e. its software architecture as well as the approaches used for image processing and camera calibration, together with the intended process for its introduction and its use beyond the scope of the Small Size League.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
RoboCup Small Size League: SSL Web Site (2009), http://small-size.informatik.uni-bremen.de
Nokia Corporation: The Qt Toolkit, http://www.qtsoftware.com/
Zickler, S.: The VarTypes System, http://code.google.com/p/vartypes/
Bruce, J., Balch, T., Veloso, M.: Fast and inexpensive color image segmentation for interactive robots. In: Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), vol. 3, pp. 2061–2066 (2000)
Zhang, Z.: A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence 22(11), 1330–1334 (2000)
Marquardt, D.: An algorithm for least-squares estimation of nonlinear parameters. SIAM Journal on Applied Mathematics 11(2), 431–441 (1963)
Bruce, J., Veloso, M.: Fast and accurate vision-based pattern detection and identification. In: Proceedings of the 2003 IEEE International Conference on Robotics and Automation, ICRA 2003 (2003)
Google Inc.: Protocol Buffers, http://code.google.com/p/protobuf/
Rost, R.J.: OpenGL Shading Language, 2nd edn. Addison-Wesley Professional, Reading (2006)
Laue, T., Röfer, T.: Particle filter-based state estimation in a competitive and uncertain environment. In: Proceedings of the 6th International Workshop on Embedded Systems, Vaasa, Finland (2007)
SSL-Vision Developer Team: RoboCup Small Size League Shared Vision System Project Home (2009), http://code.google.com/p/ssl-vision/
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zickler, S., Laue, T., Birbach, O., Wongphati, M., Veloso, M. (2010). SSL-Vision: The Shared Vision System for the RoboCup Small Size League. In: Baltes, J., Lagoudakis, M.G., Naruse, T., Ghidary, S.S. (eds) RoboCup 2009: Robot Soccer World Cup XIII. RoboCup 2009. Lecture Notes in Computer Science(), vol 5949. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-11876-0_37
Download citation
DOI: https://doi.org/10.1007/978-3-642-11876-0_37
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-11875-3
Online ISBN: 978-3-642-11876-0
eBook Packages: Computer ScienceComputer Science (R0)