
Abstract
In this paper, the functionality of a swashplate mechanism coupled with a series of one-way overrunning clutches is studied. The novel mechanism is constructed by coupling a swashplate and one-way overrunning clutch with other mechanical components to allow producing a continuously varying gear ratio. To access the capability of the proposed mechanism, a multibody dynamic simulation of the said mechanism was carried out as follows. First, the kinematics of the components making the mechanism is studied, then followed by the dynamics of the entire system. Preliminary predictions dictate that the proposed mechanism has the potential to produce continuously variable output motion including the zero-output using a constant input. However, the results indicate that the swashplate mechanism should be studied further to allow obtaining a smooth output. Initial results indicate that the proposed mechanism has the potential of converting a constant rotational motion to a continuously variable rotational speed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In recent days, the development of automotive transmission is directed towards low emission and fuel-efficient solutions. The use of internal combustion engine (ICEs) or electric motor (in hybrid and electric vehicles) is common in automotive applications. The electric motor or ICEs have their own drawbacks. The major drawback can be the tradeoff between torque and rotational speed. In general, the electrical motor maximum power can be achieved at the point where torque and rotational speed are at the half of the maximum torque and rotational speed. In case of ICEs, the maximum torque that can be achieved can be different based on the engine type but there still exists the tradeoff for achieving maximum power. For an engine or electric motor to achieve maximum power, either of the two should be running at their optimal range. In this case, the solution which can produce continuously variable ratio with constant input can be beneficial.
The swashplate mechanism has a long history dating back to around 1930s. Different variations of the swashplate mechanism depending on the applications can be found in in the literature. The main areas of application of the swashplate include the aeronautic, automotive and in hydraulic systems. The swashplate mechanism is used in the hydraulic fixed displacement and variable displacement pumps. In hydraulic systems, it can be used to convert the rotational motion to the reciprocating motion or vice-versa. In the aeronautics industry, swashplates are typically used in helicopters for controlling the blade pitch. Some studies on the development of helicopter blade pitch control system without using swashplates can be found in [1, 2]. In the automotive industries, their application is mainly in compressors for automotive air conditioners. Studies on different aspects of swashplate mechanism in regards to the application in air conditioning system can be found in [3,4,5]. Zeiger et al. [6] developed a mathematical model on the torque acting on the swashplate used in axial piston pump. The dynamic behavior of a swashplate with anti-rotation mechanism was studied by Ishii et al. [7]. The study on the application of swashplate mechanism in different application area but for the similar purpose is done by Zuti et al. [8].
The one-way overrunning clutches are the devices, which transmits torque and rotation in one direction and freewheels or disengages in the other. The one-way overrunning clutches are mechanically operated. The most common example of the one-way clutch can be seen on bicycles. In modern automatic transmissions, sprag type and roller type one-way clutches are used to brake members of the planetary gear set. Several different types of one-way clutches are available. The common types are ratchet and pawl, locking roller, locking needle roller, sprag clutch and wrap spring clutch. Roach et al. [9] made a comparison study on different types of one-way overrunning clutch using compliance criteria.
In this paper, the functionality of a swashplate mechanism coupled with a series of one-way overrunning clutches is studied to understand the capability of such a mechanism for producing a continuously varying gear ratio. A novel mechanism is constructed by coupling a swashplate and one-way overrunning clutches with other components like push rods and bevel gear sets. From the preliminary predictions, the proposed mechanism has the potential to produce continuously variable output motion including the zero output with constant input. This study will contribute to the development of the mechanism towards the application where there is need of converting a constant rotational motion to the continuously variable rotational speed.
To assess the capability of the proposed mechanism, a multibody dynamic simulation of the said mechanism was carried out. First, the kinematics of the components making the mechanism is studied, then followed by the dynamics of the entire system.
The main goal of this study is to develop a dynamic model of a swashplate and one-way overrunning clutch mechanism that allows the generation of a continuously varying motion. In accordance with this goal, the main objectives are:
-
(1)
Develop a multibody dynamic model of a swashplate and one-way overrunning clutch mechanism
-
(2)
Assess the operation range of the swashplate and one-way overrunning clutch mechanism using the multibody simulation approach
-
(3)
Devise a guideline to enhance the swashplate and one-way overrunning clutch mechanism.
2 Mechanism
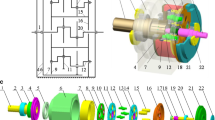
The main concept of the mechanism is to convert constant rotational motion into the continuously variable rotational motion. The mechanism consists of the input shaft, a slider mechanism fixed to the shaft, tilt plate mechanism, push rods, rocker arms, a bevel gear set with three gears and a pinion. The simplified model of the mechanism is depicted in Fig. 1.

Schematic of the proposed mechanism
In this mechanism, the input shaft is driven by a power source with constant input. The slider mechanism can translate along the axial direction of the shaft since it is constrained to the input shaft using the translational (prismatic) joint. The major function of the slider mechanism is to change the tilt angle of the swashplate. When the input shaft is rotating, it constrains the swashplate to create wobbling motion. When the tilt angle is zero degrees, the wobbling motion is not created in the swashplate. The wobbling motion is converted to translational motion using pushrods in a similar manner as seen in hydraulic displacement pumps where reciprocating motion of the piston rods is created by connecting them to the swashplate. Pushrods are mounted along the circumference of the swashplate using the spherical joint. The other end of push rods is connected to the rocker arm that is connected to the bevel gear shaft using a one-way overrunning clutch. The translational motion of the pushrods is converted to the rotational motion using rocker arm and transferred to bevel gear shaft using one-way overrunning clutch. Three bevel gears are coupled to one bevel pinion from which output is achieved.
In the proposed mechanism, with a change in tilt angle θ, the output can be continuously varied using a constant speed input. The stationary output can be achieved with tilt angle set to zero and the angle can be continuously increased resulting in the continuously increasing output. The mechanism allows the input to be constant and fixed at the optimal speed for the maximum efficiency. This feature is especially required when the input is provided using an electric motor or internal combustion engines (ICEs) since they have a certain range of rotational speed when efficiency is at peak.
2.1 Simulation Model
The simulation model is created in MSC ADAMS. The simulation model consists of several parts and joints described in ADAMS. Some of the parts are imported as cad files while some of the parts were created using inbuilt feature of ADAMS. The simulation model of the mechanism can be seen in Fig. 2. The operation of the one-way overrunning clutch is based on contacts and friction between its components. The detailed study of the one-way overrunning clutch is not the focus of this study, as such its functionality is implemented using a torque function like the torsional springs. The torque, T, transferred by the one-way overrunning clutch is defined as:
where k is the torsional stiffness, c is the torsional damping, θ is the relative angle, \( \dot{\theta } \) is the relative angular velocity and θrev is the angle created while overrunning. The STEP function used will return torque applied as either zero or torque depending on the direction of the rotation. Equation (1) describes the basic functionality of the one-way overrunning clutch, however, it should be noted that it is a simplified model. For example, the friction of the overrunning clutch is not described in detail. However, it is assumed that basic functionality is sufficiently captured.

Simulation model of the mechanism
The bevel gears were created using a gear geometry inbuilt feature embedded in MSC ADAMS. The details of the bevel gear used in the model are given in Table 1. The details of other machine element components like bearings, bolts, screws were not included in the simulation model.
Most of the joints used in the simulation model are created using the standard joints like revolute joint, spherical joint, cylindrical joint, translational joint available in MSC ADAMS. In addition, some primitive joints option available were used in constraining some components. For example, a perpendicular primitive joint was used to constrain the rotation of the swashplate in the axial direction of the shaft. The perpendicular primitive joint in MSC ADAMS constraints one rotational degrees of freedom of the mechanism.
3 Results and Analysis
The results reported here were achieved through several case studies. The variants of the case studies include force and torque distribution, and velocity at different load conditions. Initially, a motion study of the simulation model was carried out to understand the kinematics of the mechanism. After the motion study was carried out the simulation was performed by using a DC motor.
3.1 Case Study: Motion Study
The motion study of the mechanism was performed by using a constant input motion. Here the case studies included the following: (1) using a maximum swashplate tilt angle and (2) allowing variation of the swashplate tilt angle. The point motion feature available in ADAMS was used as the input to the simulation model.
Maximum Tilt Angle
Here a constant input motion and a maximum tilt angle of 12.5° were specified for the swashplate. The compactness of the design space (housing) dictates that the maximum tilt angle be limited to 12.5°. This limitation however, does not impose any restriction on the system design capability, as it is only for precaution to allow parts to move and wobble without crashing into other parts. The minimum and maximum working range of tilt angle were defined to be 0°–12.5°. Figure 3 shows the effect of tilt angle on the translational velocity of push rods.

Translational velocity of push rods in axial direction of input shaft with constant tilt angle
From Fig. 3, it is evident that the velocity of each pushrod is not equal in magnitude and that there is a phase shift between the pair of rods. The placement of rods and the anti-rotation mechanism of swashplate resulted in the different velocities of the pushrods. The resulting effect of this behavior can be seen in the further results of the mechanism.
The results obtained for the output and bevel gears can be seen in Fig. 4. Here an input speed of 6.28 rad/s (60 rpm) as can be seen from Fig. 4 is implemented. Also observed from Fig. 4 is the behavior of the bevel gear speed.

Rotational speed of input, output and bevel gears
The speed of the bevel gears together with the output speed show signs of ripple effects (Fig. 4). In the mechanism three bevel gears are coupled to one bevel pinion and bevel gears are connected to the bevel shafts using one-way overrunning clutches. In such case where one bevel gear has high speed than the others, then it will become the only driving gear and bevel pinion including other two bevel gears will be the driven ones. This phenomenon is caused by the characteristic (overrunning) of the one way overrunning clutch. Equal speed of bevel gears can be observed from Fig. 4 which suggests that the simplified model of one-way overrunning clutch is functional.
The different translational velocity of the push rods causes the ripple seen in the output rotational speed. The anti-rotation constraint used in the tilt plate results in the complicated behavior of the pushrods. However, the ripple can be optimized by optimizing the placement of push rods.
Changing Tilt Angle
This study was performed to understand the influence of continuously changing the tilt angle of the swashplate on the entire mechanism. The input and output motion were studied as well. The results of the simulation can be seen in Fig. 5. The figure shows the constant input motion of 6.28 rad/s (60 rpm) and achieved continuously variable output motion with changing tilt angle. The tilt angle is changed using a step function. The step function changes the tilt angle of the swashplate continuously from 12.5° to 0° within a specified duration of 5 s. It can be seen from Fig. 5b that the output rotational speed is varying continuously with the changing tilt angle of the swashplate. Also seen in Fig. 5 is how output rotational speed is varying continuously with the changing tilt angle of the swashplate.

(a) Changing tilt angle, (b) Input and output with changing tilt angle
The minimum and maximum output rotational speeds of the mechanism can be observed when the tilt angle is 0° and 12.5° respectively. The output rotational speed of the bevel pinion showed some ripple, so an average of rotational speed is plotted using a cubic polynomial function. The trend line of cubic polynomial was used to plot the trend line to represent the smooth behavior of the output without a ripple. See Fig. 5b.
3.2 Case Study: Study with Load at Output
Here a resistance load is applied to the output of the mechanism. The input was provided by using Eq. (2) which describes the torque provided by the DC motor as
where, Tmotor represents the torque provided by the motor, Ts represents the stall torque of the DC motor, ωn represents the no-load speed of the motor and ω represents the rotational velocity. The stall torque and no-load speed were defined as the design variable and rotational velocity was created as the function measure. The simulation was conducted by setting stall torque to 3000 Nmm and no-load speed to 60 rpm (6.28 rad/s). The resistance load was defined as the single component torque input of −1500 Nmm to the bevel pinion, which is the output of the mechanism. The direction of the resistance torque was opposite to the rotation direction of the output. Here the resistance torque is applied to the 50% of the maximum input torque that DC motor can produce.
The proposed mechanism has the limit of 0°…12.5° tilt angle, and in this part, it is assumed that swashplate is operating with maximum tilt angle. The results were obtained for the input and output torques, forces on components like pushrods and other mechanisms. The simulation was studied with the constant tilt angle of the swashplate. Figure 6 shows the input and output rotational speeds while the torque in different components can be seen from Fig. 7. The ripple which was observed earlier can also be seen from the results obtained here as well. Similar kind of behavior of the ripple can be observed from both the rotational speed and torque results.

Input motor speed and output speed

Torque in different components
The DC motor specification were used for the input torque and speed while constant resistance load was applied to the output. The ripple in the input can be observed from Figs. 6 and 7. The input from the DC motor depends on the resistance load and in this case, constant resistance load was applied to the output. As seen from earlier results, the ripple was observed in the output when constant input was provided. In this case, since constant resistance load was applied to the output and DC motor was used as the input, the ripple is observed in the input.
The different components of the forces in the rods were studied. The study showed that the z-component force (shaft axial direction) present in the rod is dominant over other components and is the most contributing. The study was focused on the z-component of the forces present in the rods.
It can be seen from Fig. 8 that the forces in all the rods are not equal. This will result in the torque ripple in the output. If the magnitude of the forces in the push rods are observed, the trend of the torque ripple observed in the output can be related to the magnitude of the forces in the rods. It can be also noticed that only one pushrod seems to be functional at a time. It is mainly due to use of one-way overrunning clutches. The overrunning feature of the one-way overrunning clutch caused this phenomenon. The magnitude of the force in the push rods is not constant and each rod is functional when the maximum force is present in the rod. The rod with maximum force dominates the functionality of other rods due to the overrunning feature of the one-way clutch. Similar trend was also observed in the motion study of the bevel gears where one high speed bevel gear was dominating the speed of the whole bevel gear set. It can be concluded that the force is not distributed equally among the push rods.

Magnitude of force in pushrod
The magnitude of the forces present in different pushrods can be seen from Fig. 8. The trend of the magnitude of the push rods can be compared to the trend seen in the behavior of the torque and rotational speed. The trend of the magnitude of push rods correlates the behavior seen earlier in torque and rotational speed case.
4 Conclusion
A mechanism for generating continuously variable motion has been proposed. A simulation model using multibody dynamics approach has been developed. A variety of case studies have been conducted to understand the intrinsic characteristics of the proposed mechanism. The results obtained from the simulation suggests that the mechanism can produce continuously variable output, using constant input, however in this design the output speed is not smooth dictating the need for future improvement to the model. Nonetheless, the mechanism presented in this paper can be used in place of push belt pulley mechanisms commonly found in CVTs. In terms of performance, push belts can be considered as the weakest part of a CVT. The proposed mechanism is fully mechanical and can be assumed to be efficient to serve a purpose of producing continuously varying motion. As seen from the simulation results the proposed mechanism can produce continuously varying speed and can produce a neutral output when the input is running at constant speed. Additional components like those used in several CVTs can be added together to form the Infinitely Variable Transmission which can produce continuously variable forward ratio, neutral and continuously variable reverse. Several issues with one-way overrunning clutches and swashplate mechanism were identified during the study of the mechanism. The issue of ripple was observed during the study and it is claimed to be a consequence of the swashplate. Some further studies on swashplate mechanism are required to achieve smooth output (without ripple). Addition of a flywheel in the proposed mechanism can be considered for the further studies in order to reduce the ripple observed in this study. Studies on push rods and their placement should be considered as the further studies to make the mechanism more smooth and efficient. Also, flexibility of the push rods and their impacts on the dynamic behavior of the system should be considered for the further studies.
References
Shen, J., Chopra, I.: Swashplateless helicopter rotor with trailing-edge flaps. J. Aircr. 41(2), 208–214 (2004)
Wang, J., Wang, H., Wu, C.: Development of swashplateless helicopter blade pitch control system using the limited angle direct-drive motor (LADDM). Chin J Aeronaut 28(5), 1416–1425 (2015)
Tian, C., Liao, Y., Li, X.: A mathematical model of variable displacement swashplate compressor for automotive air conditioning system. Int J Refrig 29(2), 270–280 (2006)
Zhang, Y., Wang, W.: Using overflow in a swash plate compressor for automotive air conditioning system. Proc. Inst. Mech. Eng. A: J. Power Energy 226(4), 564–579 (2012)
Lee, G.H., Lee, T.J.: A study on the variable displacement mechanism of swash-plate type compressor for automotive air conditioning system. In: Proceedings of International Compressor Engineering Conference, p C079 (2004)
Zeiger, G., Akers, A.: Torque on the swashplate of an axial piston pump. J Dyn Syst Meas Contr 107(3), 220–226 (1985)
Ishii, N., Abe, Y., Taguchi, T., Kitamura, T.: Dynamic behavior of a variable displacement wobble plate compressor for automotive air conditioners. In: Proceedings of International Compressor Engineering Conference, p C723 (1990)
Zuti, Z., Shuping, C., Xiaohui, L., Yuquan, Z., Weijie, S.: Design and research on the new type water hydraulic Axis piston pump. J. Press. Vessel Technol. 138(3), 031203 (2016)
Roach, G.M., Howell, L.L.: Evaluation and comparison of alternative compliant overrunning clutch designs. Trans. Am. Soc. Mech. Eng. J. Mech. Design 124(3), 485–491 (2002)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Bhusal, K.P., Ghalamchi, B., Nutakor, C., Sopanen, J., Nummelin, T. (2019). Multibody Dynamics Simulation of a Mechanism for Generating Continuously Variable Motion. In: Cavalca, K., Weber, H. (eds) Proceedings of the 10th International Conference on Rotor Dynamics – IFToMM . IFToMM 2018. Mechanisms and Machine Science, vol 62. Springer, Cham. https://doi.org/10.1007/978-3-319-99270-9_32
Download citation
DOI: https://doi.org/10.1007/978-3-319-99270-9_32
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-99269-3
Online ISBN: 978-3-319-99270-9
eBook Packages: EngineeringEngineering (R0)