
Abstract
This chapter provides a short introduction to the part of this volume dealing with distributed control of power grids. A brief description of some of the challenges facing existing power grids from a control perspective is given. The research community dealing with distributed control of power grids is highly active, and there already exists a vast literature on the topic. A coverage of this literature with any pretense of full or partial completeness would be difficult (if not impossible) and is not in any way attempted in this brief introduction.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Distributed Control Solutions
- Power Grid
- Advanced Metering Infrastructure (AMI)
- Distributed Energy Resources (DERs)
- Legacy Grid
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The electrical power grids of the world rely on infrastructure that emerged based on pre-digital technology more than a hundred years ago. Since the origin, the power grids have developed massively in technology in order to improve resiliency, safety, and effectiveness. As new technologies have been introduced, the grids have grown in complexity and during the past couple of decades, digital technology has been massively deployed.
Due to the recent grid evolution, however, the power grids of the world have to address challenges in terms of an urgent need for massively increased flexibility. This increased flexibility is required in order to integrate a higher penetration of renewable generation, of rooftop PV and other Distributed Energy Resources (DERs), see e.g., DNV-GL [8]. In addition to an increased level of intermittent generation, also power usage patterns are changing dramatically. The change of usage patterns on different time scales is driven, e.g., by the spread of power electronic devices and by a slow but steady increase of electric vehicles.
The combination of an increased amount of renewable generation and changed usage patterns introduce more variability and more uncertainty in the power grids, and thus, threaten to compromise grid reliability, if appropriate action is not taken.
Fortunately, some of the very same changes to the power grids also constitute a potential opportunity to mitigate the challenges. By deploying advanced control solutions at various levels of the grid, there are significant possibilities for establishing flexibility to the extent required in the immediate future, but also on a longer term.
The position chapters in this part of the present manuscript encompass a number of research issues that together constitute part of a transformational grid control paradigm based on distributed control algorithms. These proposed research challenges address how to manage dynamic changes within power grids at a local or a global scale in a reliable way by leveraging additional resources in the grid. At a system level, massive deployment of distributed control technology is expected to facilitate a more efficient usage of natural resources and a significant reduction of greenhouse gas emissions. One of the underlying instruments in obtaining these goals involves matching power consumption to intermittent generation in real-time. Also, the capacity of distribution grid networks can be expected to be exploited more efficiently by employing local DERs optimally. This facilitates a potential of reduced investments in distribution grid extensions in response to increased consumption.
Also, distributed control solutions deployed massively in power distribution grid also carry the potential to substitute a proportion of the spinning reserves. This, in turn, reduces the need to curtail renewable generation and thereby also reducing, e.g., the need for fossil energy resources.
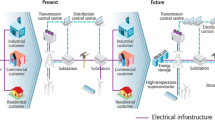
In similarity with other large-scale systems, by tradition the power grids of the world have been engineered with hierarchical control topologies, guided by separation in temporal and spatial scales. This is reflected in the well-known chain from centralized generation via transmission, sub-transmission, and finally over distribution systems to load consumption. Across the world, such chains have traditionally been managed in a strict top-down manner. During the past couple of decades, however, an increasing number of successes have been reported across various industries, where application of distributed control solutions have shown significant advantages over traditional control solutions based on hierarchical control topologies. In a similar fashion, power system operators on several continents have gained experience from experiments with various types of distributed control solutions in power grids. Results indicate that, indeed, such solutions can lead to increased efficiency in grid operation and to reduced greenhouse gas emissions, in part by offering scalable integration of DERs, especially in the medium voltage and the low voltage grids.
The path toward a fully deployed power grid solution based on advanced control theory, and in part relying on distributed control topologies, however, still requires adequate responses to a number of research challenges remaining, which is the topic of the contributions of this part of the present manuscript. The solutions proposed and in smaller scales explored experimentally range from control topologies on one extreme based on system operator management from top to bottom to the other extreme where the grids are operated as a system of weakly connected microgrids. The research challenges described in the chapters of this part of the manuscript in part encompasses the question of which control topologies better facilitate an interconnected power system with a high penetration of renewable power generation and orchestrates the operation of a large number of DERs.
2 Legacy Grids, Trends, and Enabling Technologies
From a control perspective, the legacy grids across the world have been operated according to very similar paradigms, which can be summarized by the conventional primary/secondary/tertiary control system:
Control level | Timescale | Goal | Strategy |
|---|---|---|---|
Primary | Real-time | Stabilizing frequency and voltage | Decentralized |
Secondary | Minutes | Restoring frequency | Centralized |
Tertiary | Offline | Optimizing operation | Centralized/forecast |
Several current trends and future expectations to grid developments are challenging whether, from a control perspective, this hierarchical structure based on temporal (and spatial) separation is still the best (or even appropriate) for future power grids, see e.g., EPRI [11].
As one major trend, physical volatility is steadily increasing in part due to the development mentioned above with increased renewable penetration and distributed generation, and in part due to growing demand in systems with an aging infrastructure. As a result, a lowered inertia and reduced robustness margins are seen on grids worldwide.
As a second major trend, a number of technological advances are seen, e.g., in terms of novel sensors and actuators (e.g., PMUs, FACTS) and access to grid-edge resources (e.g., flexible loads). Further, advanced control is being introduced in a vast number of grid-connected cyber–physical systems. This collectively facilitates a future cyber-coordination layer for smart grid solutions.
Several other emerging technologies constitute a basis for accelerating the transition toward a smarter grid. In the following, we shall emphasize a few among several enabling technologies for the potential grid transformation.
2.1 Advanced Metering Infrastructure (AMI)
Since deregulation and market-driven pricing were introduced in a majority of power grids across the world, utilities have been pursuing technologies that could assist in matching power generation to power consumption. Thus, an advanced metering infrastructure has been deployed in grids worldwide, in part consisting of smart meters deployed at individual customer nodes. The capabilities of smart meters vary significantly, but usually more than just automatic reading of energy deliveries are offered. Some smart meters offer real-time or near real-time power usage. Additional services include notifications of power outages and power quality measurements. A majority of smart meters are equipped with technology for two-way communication which makes them a significant potential enabler for advanced control solutions.
As part of an Advanced Metering Infrastructure (AMI), smart meters can be seen as communication hubs for systems that can measure, collect and analyze energy usage, but also receive signals to activate and manage flexible power consuming and/or generating (e.g., rooftop PV systems) at the user’s end.
Two major classes of distributed control approaches for power distribution grids based on AMI can be discriminated based on the type of signal, they would send to the smart meters. In direct control approaches, meters would receive a command signal, either in terms of an ON/OFF signal for specific devices, or in terms of a reference power signal that select devices would have to follow. In indirect control approaches, meters would receive a price signal, leaving to the consumers’ discretion, how the consumer would like to respond to the price signal by increasing or decreasing consumption. A variation of this is the Transactive Control and Coordination approach, see below, where a market-like structure lets consumers negotiate delivery of a certain quantity of energy at a certain priced based on two-way communication.
2.2 Internet of Things (IoT)
Across the world, massive research investments are being made in the Internet of Things (IoT), possibly under the conviction that “...the ‘Industrial Internet’ [will] start the next Industrial Revolution” (Joe Salvo, GE).
IoT is expected to transform a large number of industries, including Manufacturing, Agriculture, Mining, Transportation, Oil and gas, etc. However, IoT also holds a huge potential for transforming the Energy and Power area and in particular the electrical power grids. Leveraging the immense intelligence at the edge of the grid, however, requires a paradigm shift with a transition from centralized to decentralized decision-making.
In order to benefit from the expected future access to a huge number of grid-edge resources, the legacy grid control architecture is further challenged. The system will never obtain sufficient bandwidth for accumulating, storing, and processing the immense amount of data. The inherent latency involved in centralized processing will prohibit decisions to be made on timescales required by the grid.
IoT integration in the grid requires data processing to be performed as close to the data collection nodes as possible. It is also necessary to allow these nodes to make decisions (semi-)autonomously.
2.3 Advanced Inverter Technology
During the past couple of decades, converters based on power electronics have been vastly deployed in the large continental power grids, see, e.g., Blaabjerg et al. [3] and references therein. The literature has had a strong emphasis on potential challenges for this major change to the grid. From a controls perspective, it is possible, however, also to take the opposite point of view and pursue opportunities embarking from the significantly extended control capabilities offered by such devices.
From a controls perspective, these opportunities would involve a power grid with an extensive deployment of controllable power electronic devices and sufficient resources for real or virtual storage. Such a power grid needs to have a potential for at least the same resilience and reliability as the legacy grid, even if the penetration of intermittent renewable generation is significantly increased. In order to realize most of the potential of widely deployed controllable power electronic devices, advanced control techniques are required, and the legacy grid structure is not able to facilitate this. In order to achieve this, there is a need for developing control algorithms that aggregate and disaggregate control capabilities from power electronic devices across levels in the power system. The solutions obtained will be used to investigate to which extent the new capabilities will facilitate increased penetration of intermittent renewable generation in terms of assessing the added control authority in various frequency ranges relevant for addressing this type of intermittency.
The applications of scalable control systems involve two fundamental issues: (i) the realization of the scalable control systems with power electronics apparatus, and (ii) the assessment of control performance at different system levels.
Power electronics systems are basically a hybrid system of the discrete switching events of power semiconductor devices and the continuous dynamics of passive components. Power electronics converters with different power scales operate with different switching speeds for reduced power losses, which consequently sets the upper limit for the response time of the control system, and further challenges the realization of the scalable control systems for power converters with different power ratings.
The small time constants of power converters and wider bandwidth of their control systems complicate the dynamic coupling and interactions between the converters and power grids at different system levels, implying more electromagnetic transient oscillations. Hence, the dynamic characterization of power electronic components or subsystems equipped with scalable control systems is essential for the performance assessment, Rocabert et al. [54].
2.3.1 Virtual Inertia
By deploying a scalable control system for grid-wide coordination of converters, it will be possible to transform any converter-controlled energy storage to a unit that contributes to the overall stabilization of the power grid. In particular, such a unit can be controlled to emulate rotating mechanical energy of conventional generators, so-called virtual inertia. Actual units could be either at the generating side, e.g., an electrical storage at a wind farm, or on the load side (smart grid), e.g., a Heating, Ventilation, and Air-Conditioning system in a large commercial building.
2.3.2 Harmonic Stability
The increasing penetration of power electronics systems aggravate harmonic distortions in the power grid, due to the nonlinear switching operations of electronic devices. The harmonics tend to trigger the electrical resonance frequencies of power systems, and are further coupled with the fast control dynamics of power converters causing harmonic oscillations. This instability phenomenon has recently been reported in large-scale renewable power plants and cable-based transmission grids. To prevent harmonic instability, advanced control theory could be used first to reshape the dynamic behavior of power converters with positive damping characteristics, and then to synthesize the damping over a wide frequency range by system-wide coordination of converters.
3 Distributed Control Paradigms
Distributed control has been proposed as part of a novel control paradigm for power grids for various parts of the grids. In particular, however, distributed control has been proposed as an approach to enable load-side participation. Load-side participation as a supplement to control on the generation side is interesting for a large number of reasons, including:
-
Load-side control might be faster as there is little or low inertia
-
The huge number of devices on the load side has the potential of making the system more reliable by a spreading approach
-
A large number of sensing and actuating nodes offers the potential of a better ability to localize disturbances
-
As the need for control capacity reduces on the generator side, generation can be made more efficient
-
No additional emissions or use of fossil resources are required for load-side control.
According to Lu and Hammerstrom [38], residential power loads account for approximately one-third of peak demand, but 61% of these devices are ‘Grid Friendly’, i.e., they have a potential for participating in load-side control. In the US, the operating reserve is 13% of the peak, whereas the total ‘Grid Friendly’ capacity is 18%.
A distributed control paradigm must be able to provide voltage control. One problem in that context is that several distributed control topologies might lead to steady-state voltage deviations. So, on one hand, voltage regulation constraints must be built into a feasible distributed grid control solution. On the other hand, a distributed control solution should be expected to provide a reasonable sharing of loads between available DERs. Unfortunately, there is a fundamental conflict between these two objectives, and a feasible power grid distributed control solution must be able to provide an acceptable compromise between the two.
An important enabler for applying distributed control as part of frequency control is the notion of Grid Friendly Appliances (GFA). GFA is a specific standard for interfacing between grid frequency and individual devices. Some recent work on GFA can be found in Lian et al. [36], Williams et al. [62] , Elizondo et al. [10], Lian et al. [35], Moya et al. [46] and references therein.
A large number of distributed control approaches have been proposed in the control literature. Several of these have been suggested as candidates for being part of an advanced power systems control solution. In the following, however, among this large group of solutions, we shall only briefly introduce three categories that have been emphasized in the challenge chapters of this volume. It should be emphasized, however, that several other approaches are relevant for distributed control of power grids. Examples of such approaches are passivity-based and port-Hamiltonian methods, see e.g., Schiffer et al. [55] and references therein.
3.1 Transactive Control and Coordination
An approach to massive activation of DERs that has gained significant attention is the so-called Transactive Control and Coordination (TC2) approach, see, e.g., Subbarao et al. [58] and references therein (please, refer also to the part of this volume that deals with markets). Some further recent references are Subbarao et al. [59], Li et al. [31,32,33].
TC2 offers to manage generation, power flows and consumption with reliability constraints by market-like constructs. This is achieved by using global information and local control decisions at nodes where the power flow can be affected. Each node communicates with the network via transactive incentives and feedback signals. TC2 is a flexible design in the sense that it allows deployment at all levels of the energy hierarchy.
TC2 offers a distributed approach based on self-organized market-like constructs. Thereby TC2 has the potential to overcome the challenge formed by a huge number of controllable assets, which make centralized optimization unworkable. TC2 has a simple information protocol, which is common between all nodes at all levels of a system, comprised by quantity, price/value, and time. This makes TC2 a candidate solution for challenges related to interoperability. In terms of security and privacy, TC2 attempts to minimize sensitivities by limiting the required amount of data exchange to the triple mentioned above. Finally, TC2 potentially achieves scalability by being self-similar at all grid scales. The TC2 paradigm for control and communication is common across all nodes of the system. A proposed ratio of supply nodes to served nodes is \(10^3\).
3.2 Consensus-Based Distributed Control and Coordination
Consensus-based control algorithms are a subclass of cooperative control algorithms. The main idea is that each local agent generates decisions for a local subset of the total system states based on a global objective. Each agent has the ability to communicate subject to a given communication topology with a small number of neighboring agents with a certain bandwidth, limiting the amount of information exchanged.
The consensus algorithm now proceeds by all agents communicating an estimate of one or several global variables with their nearest neighbors based on their own state information and past values of their neighbors’ estimates of said variable(s). It can be shown that under mild observability assumptions and a simple connectivity assumption on the communication topology that all local estimates will converge to the global value(s).
Consensus-based control algorithms have several potential applications for electrical power grids. Maybe the obvious candidate is consensus-based control applied to a grid configuration consisting of weakly connected microgrids that collectively have to provide a certain grid objective, e.g., voltage stabilization. There are, however, many other examples, e.g., coordination of units below a substation and between substations, on and between individual radials, etc.
It has been widely claimed, but not proven, that consensus algorithms are scalable. Actually, some experimental evidence suggests that scalability is not straightforward, so future work might be needed. Other issues have been related to integration of distributed generation and especially storage in the algorithms (a recent breakthrough to that end has been published in Wu et al. [63]). To speed up consensus-based control/coordination algorithms, an important contribution can be found in Olshevsky [47].
3.3 Distributed Control Based on Distributed Optimization Algorithms
A huge research effort in the optimization community has been dedicated to distributed optimization. A significant proportion of available distributed optimization algorithms, including but not limited to subgradient algorithms, can be applied as the basis for distributed control.
One large class of distributed optimization techniques are based on augmented Lagrangian decompositions. These approaches include dual decomposition, alternating direction method of multipliers, and analytical target cascading. Another relevant class of techniques are based on decentralized solutions of Karush–Kuhn–Tucker (KKT) conditions. Examples of these are consensus/innovation methods (see also above) and the optimality condition decomposition.
A recent survey of distributed control approaches based on distributed optimization has been published in Molzahn et al. [45]. Please, refer to this paper for further literature on the topic.
4 Overview of Challenge Chapters
The remainder of this part of the present volume contains three separate challenge chapters. The topics include how to control flexible loads in order to make them behave like virtual storages, how to model low-inertia inverter-dominated power systems, how to systematically distribute the design of local controllers, and how to employ stochastic control theory for smart grid solutions, in particular, for microgrids.
In the following, each of the three challenge chapters will be described shortly.
4.1 Virtual Energy Storage from Flexible Loads: Distributed Control with QoS Constraints by Prabir Barooah
This chapter discusses the concept of virtual energy storages. By manipulating demand around a nominal baseline, power consuming devices in our infrastructure can contribute to accommodating situations with excess power or with power deficiency, thus acting in ways that resemble an electrical storage device. However, to make loads exhibit appropriate charging and discharging patterns that are useful to the power grid requires the solution of a number of complex control problems. In essence, the main challenge is to achieve a good compromise between providing adequate grid services while maintaining Quality of Service for power consumers.
One of the challenges discussed in the chapter relates to the difficulty of providing good capacity estimates due to variations over time, especially those caused by exogenous factors such as weather, which is not conveniently captured in simple models. Also, the power baseline for a device acting as VES is very difficult to estimate.
Another line of challenges relate to dispatch. An optimal dispatch of VES resources should be based on cost, but cost of operation is very difficult to quantify or estimate without tedious modeling of every available system. As part of estimating cost, round-trip efficiency should be established, which is also generally difficult to capture.
Finally, the chapter includes a short discussion of challenges associated with the interplay between control and communication topologies.
4.2 Distributed Design of Local Controllers for Future Smart Grids by Tomonori Sadamoto, Takayuki Ishizaki, Takuro Kato, and Jun-ichi Imura
In this chapter, the authors describe a new notion of distributed controller design where local controllers are individually designed by using partial models of the system, e.g., single-machine-infinite-bus models, and their control actions are individually determined by local feedbacks from corresponding neighborhoods.
One of the challenges discussed in this chapter is that this approach can cause transient instability of power systems with large-scale photovoltaic generators (PVs) integration. Motivated by this, a distributed design problem with consideration of node clustering is formulated, and it is discussed how to find clusters from the perspective of controllability with respect to the corresponding local inputs.
Another challenge discussed in this chapter relates to design of interchangeable components. In order to facilitate the addition of new components, it would be desirable that newly added components have interchangeability or plug-and-play capability. A significant challenge, however, relates to identifying the class of such components as well as which portfolio constraints to be imposed on the interconnection of the components to preexisting grids.
4.3 Smart Grid Control: Opportunities and Research Challenges A Decentralized Stochastic Control Approach by Maryam Khanbaghi
In this chapter, a future grid structure with massive presence of microgrids and nanogrids is discussed. As one of several salient features, in such a grid structure, resilience can be pursued by appropriately alternating between islanded and grid-integrated mode for microgrids and nanogrids. In challenging situations, where a conventional grid architecture could risk wide-area blackouts, an architecture dominated by large numbers of micro- and nanogrids could keep critical parts of the grid operational by transitioning these to islanded operation.
One of the control challenges discussed in the paper relates to how to ensure that the performance obtained for each nano-/microgrid in islanded mode is inherited to a suitable extent, when most or all of these are operated in grid-integrated mode. The chapter proposes to address this control challenge by (1) pursuing to design a robust control strategy to maintain stability, and (2) by reevaluating system requirements in order to maintain optimality.
NB! This list includes a number of seminal contributions on distributed control of power grids that are not singled out above.
References
P.P. Barker, R.W. De Mello, Determining the impact of distributed generation on power systems. i. radial distribution systems, in Proceedings IEEE Power Engineering Society, vol. 3, pp. 1645–1656 (2000). https://doi.org/10.1109/PESS.2000.868775
B. Biegel, P. Andersen, J. Stoustrup, L.H. Hansen, D.V. Tackie, Information modeling for direct control of distributed energy resources, in Proceedings of the 2013 American Control Conference (Washington, DC, USA, 2013), pp. 3498–3504. https://doi.org/10.1109/ACC.2013.6580372
F. Blaabjerg, R. Teodorescu, M. Liserre, A.V. Timbus, Overview of control and synchronization of three phase distributed power generation systems. IEEE Trans. Industr. Electr. 53(5), 1398–1409 (2006)
R.E. Brown, Impact of smart grid on distribution system design, in Proceedings IEEE Power Energy Society General Meeting (Pittsburgh, PA, 2008). https://doi.org/10.1109/PES.2008.4596843
D.S. Callaway, I.A. Hiskens, Achieving controllability of electric loads. Proc. IEEE 99(1), 184–199 (2011). https://doi.org/10.1109/JPROC.2010.2081652
K. De Brabandere, K. Vanthournout, J. Driesen, G. Deconinck, R. Belmans, Control of microgrids, in Proceedings IEEE Power Engineering and Society General Meeting, pp. 1–7 (2007). https://doi.org/10.1109/PES.2007.386042
A.L. Dimeas, N.D. Hatziargyriou, Operation of a multiagent system for microgrid control. IEEE Trans. Power Syst. 20(3), 1447–1455 (2005). https://doi.org/10.1109/TPWRS.2005.852060
DNV-GL (2014) A Review of Distributed Energy Resources, DNV-GL for the New York Independent System Operator
J. Driesen, F. Katiraei, Design for distributed energy resources. IEEE Power Energy Mag. 6(3), 30–40 (2008). https://doi.org/10.1109/MPE.2008.918703
M. Elizondo, K. Kalsi, C. Moya, W. Zhang, Frequency responsive demand in U.S. western power system model. In: Proceedings of, IEEE Power and Energy Society General Meeting (Denver, CO, USA, 2015)
EPRI, The integrated grid: realizing the full value of central and distributed energy resources (2014)
J. Fan, S. Borlase, The evolution of distribution. IEEE Power Energy Mag. 7(2), 63–68 (2009). https://doi.org/10.1109/MPE.2008.931392
J. Goellner, M. Prica, J. Miller, S. Pullins, J. Westerman, J. Harmon, T. Grabowski, H. Weller, B. Renz, S. Knudsen, D. Coen, Demand dispatch—intelligent demand for a more efficient grid. Tech. Rep. DOE/NETL-DE-FE0004001 (National Energy Technology Laboratory, 2011)
F.V. Gomes, S.J. Carneiro, J.L.R. Pereira, M.P. Vinagre, P.A.N. Garcia, L.R. Araujo, A new heuristic reconfiguration algorithm for large distribution systems. IEEE Trans. Power Syst. 20(3), 1373–1378 (2005). https://doi.org/10.1109/TPWRS.2005.851937
F.V. Gomes, S. Carneiro Jr., J.L.R. Pereira, M.P. Vinagre, P.A.N. Garcia, L.R. de Araujo, A new distribution system reconfiguration approach using optimum power flow and sensitivity analysis for loss reduction. IEEE Trans. Power Syst. 21(4), 1616–1623 (2006). https://doi.org/10.1109/TPWRS.2006.879290
A. Gusrialdi, Z. Qu, M.A. Simaan, Distributed scheduling and cooperative control for charging of electric vehicles at highway service stations. IEEE Trans. Intell. Transp. Syst. 18(10), 2713–2727 (2017)
R. Harvey, Z. Qu, Cooperative control and networked operation of passivity-short systems, in Recent Advances and Future Directions on Adaptation and Control, ed. by K.G. Vamvoudakis, S. Jagannathan (Elsevier, Cambridge, MA, 2016), pp. 499–518
G.T. Heydt, The next generation of power distribution systems. IEEE Trans. Smart Grid 1(3), 225–235 (2010). https://doi.org/10.1109/TSG.2010.2080328
R. Hidalgo, C. Abbey, G. Joós, A review of active distribution networks enabling technologies, in Proceedings IEEE Power Energy and Soceity General Meeting, pp. 1–9 (2010). https://doi.org/10.1109/PES.2010.5590051
C.A. Hill, M.C. Such, D. Chen, J. Gonzalez, W.M. Grady, Battery energy storage for enabling integration of distributed solar power generation. IEEE Trans. Smart Grid 3(2), 850–857 (2012). https://doi.org/10.1109/TSG.2012.2190113
J. Huang, C. Jiang, R. Xu, A review on distributed energy resources and Microgrid. Renew. Sust. Energy Rev. 12(9), 2472–2483 (2008). https://doi.org/10.1016/j.rser.2007.06.004
A. Ipakchi, F. Albuyeh, Grid of the future. IEEE Power Energy Mag. 7(2), 52–62 (2009). https://doi.org/10.1109/MPE.2008.931384
R. Johansson, A. Rantzer, Distributed decision making and control (Springer, 2012)
H. Karimi, H. Nikkhajoei, R. Iravani, Control of an electronically-coupled distributed resource unit subsequent to an islanding event. IEEE Trans. Power Deliv. 23(1), 493–501 (2008). https://doi.org/10.1109/TPWRD.2007.911189
F. Katiraei, M. Iravani, Power management strategies for a microgrid with multiple distributed generation units. IEEE Trans. Power Syst. 21(4), 1821–1831 (2006). https://doi.org/10.1109/TPWRS.2006.879260
F. Katiraei, M.R. Iravani, P.W. Lehn, Micro-grid autonomous operation during and subsequent to islanding process. IEEE Trans. Power Deliv. 20(1), 248–257 (2005). https://doi.org/10.1109/TPWRD.2004.835051
F. Katiraei, M. Iravani, P.W. Lehn, Small-signal dynamic model of a micro-grid including conventional and electronically interfaced distributed resources. IET Gener. Transm. Dis. 1(3), 369–378 (2007). https://doi.org/10.1049/iet-gtd:20045207
R. Lasseter, A. Akhil, C. Marnay, J. Stephens, J. Dagle, R. Guttromson, A.S. Meliopoulous, R. Yinger, J. Eto, Integration of Distributed Energy Resources. The CERTS Microgrid Concept (Lawrence Berkeley National Laboratory, 2002)
S. Li, W. Zhang, J. Lian, K. Kalsi, Market-based coordination of thermostatically controlled loads-Part I: a mechanism design formulation. IEEE Trans. Power Syst. 31(2), 1170–1178 (2016a). https://doi.org/10.1109/TPWRS.2015.2432057
S. Li, W. Zhang, J. Lian, K. Kalsi, Market-based coordination of thermostatically controlled loads-Part II: Unknown parameters and case studies. IEEE Trans. Power Syst. 31(2), 1179–1187 (2016b). https://doi.org/10.1109/TPWRS.2015.2432060
S. Li, W. Zhang, J. Lian, K. Kalsi, Market-based coordination of thermostatically controlled loads-part i: a mechanism design formulation. IEEE Trans. Power Syst. 31(2), 1170–1178 (2016c)
S. Li, W. Zhang, J. Lian, K. Kalsi, Market-based coordination of thermostatically controlled loads-part ii: unknown parameters and case studies. IEEE Trans. Power Syst. 31(2), 1179–1187 (2016d)
S. Li, W. Zhang, J. Lian, K. Kalsi, Social optima in non-cooperative mean field games, in Proceedings of 2016 IEEE Conference on Decision and Control (Las Vegas, NV, USA, 2016)
Y.W. Li, C.N. Kao, An accurate power control strategy for power-electronics-interfaced distributed generation units operating in a low-voltage multibus microgrid. IEEE Trans. Power Electr. 24(12), 2977–2988 (2009). https://doi.org/10.1109/TPEL.2009.2022828
J. Lian, Y. Sun, L. Marinovici, K. Kalsi, Improved controller design of grid friendly appliances for primary frequency response, in Proceedings of, IEEE Power and Energy Society General Meeting (Denver, CO, USA, 2015)
J. Lian, J. Hansen, L. Marinovici, K. Kalsi, Hierarchical decentralized controller design for demand-side primary frequency response, in Proceedings of, IEEE Power and Energy Society General Meeting (MA, USA, Boston, 2016)
Y. Lin, P. Barooah, S. Meyn, T. Middelkoop, Experimental evaluation of frequency regulation from commercial building hvac systems. IEEE Trans. Smart Grid 6, 776–783 (2015). https://doi.org/10.1109/TSG.2014.2381596
N. Lu, D. Hammerstrom, Design considerations for frequency responsive grid friendly appliances, in Proceedings of 2005/2006 IEEE/PES Transmission and Distribution Conference and Exhibition (Institute of Electrical and Electronics Engineers, Dallas, TX, USA, 2006), pp. 647–652
O. Ma, N. Alkadi, P. Cappers, P. Denholm, J. Dudley, S. Goli, M. Hummon, S. Kiliccote, J. MacDonald, N. Matson, D. Olsen, C. Rose, M.D. Sohn, M. Starke, B. Kirby, M. O’Malley, Demand response for ancillary services. IEEE Trans. Smart Grid 4(4), 1988–1995 (2013). https://doi.org/10.1109/TSG.2013.2258049
A. Maknouninejad, Z. Qu, F. Lewis, A. Davoudi, Optimal, nonlinear, and distributed designs of droop controls for dc microgrids. IEEE Trans. Smart Grid 5(5), 2508–2516 (2014)
S. Massoud Amin, B.F. Wollenberg, Toward a smart grid: power delivery for the 21st century. IEEE Power Energy Mag. 3(5), 34–41 (2005). https://doi.org/10.1109/MPAE.2005.1507024
J. Medina, N. Muller, I. Roytelman, Demand response and distribution grid operations: opportunities and challenges. IEEE Trans. Smart Grid 1(2), 193–198 (2010). https://doi.org/10.1109/TSG.2010.2050156
S. Meyn, P. Barooah, A. Busic, Y. Chen, J. Ehren, Ancillary service to the grid using intelligent deferrable loads. IEEE Trans. Auto. Control 60(11), 2847–2862 (2013)
A.H. Mohsenian-Rad, A. Leon-Garcia, Optimal residential load control with price prediction in real-time electricity pricing environments. IEEE Trans. Smart Grid 1(2), 120–133 (2010). https://doi.org/10.1109/TSG.2010.2055903
D.K. Molzahn, F. Drfler, H. Sandberg, S.H. Low, S. Chakrabarti, R. Baldick, J. Lavaei, A survey of distributed optimization and control algorithms for electric power systems. IEEE Trans. Smart Grid 8(6), 2941–2962 (2017)
C. Moya, W. Zhang, J. Lian, K. Kalsi, A hierarchical framework for demand-side frequency control, in Proceedings of 2014 American Control Conference (Portland, OR, USA, 2014), pp. 52–57
A. Olshevsky, Linear time average consensus on fixed graphs and implications for decentralized optimization and multi-agent control (2014). arXiv:14114186
P. Palensky, D. Dietrich, Demand side management: Demand response, intelligent energy systems, and smart loads. IEEE Trans. Industr. Inf. 7(3), 381–388 (2011). https://doi.org/10.1109/TII.2011.2158841
J.A. Peças Lopes, C.L. Moreira, A.G. Madureira, Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 21(2), 916–924 (2006). https://doi.org/10.1109/TPWRS.2006.873018
M.A.A. Pedrasa, T.D. Spooner, I.F. MacGill, Coordinated scheduling of residential distributed energy resources to optimize smart home energy services. IEEE Trans. Smart Grid 1(2), 134–143 (2010). https://doi.org/10.1109/TSG.2010.2053053
P. Piagi, R.H. Lasseter, Autonomous control of microgrids, in Proceedings IEEE Power Engineering and Society General Meeting, p. 8 (2006). https://doi.org/10.1109/PES.2006.1708993
Z. Qu, M.A. Simaan, Modularized design for cooperative control and plug-and-play operation of networked heterogeneous systems. Automatica 50(9), 2405–2414 (2014)
F. Rahimi, A. Ipakchi, Demand response as a market resource under the smart grid paradigm. IEEE Trans. Smart Grid 1(1), 82–88 (2010). https://doi.org/10.1109/TSG.2010.2045906
J. Rocabert, A. Luna, F. Blaabjerg, P. Rodrguez, Control of power converters in ac microgrids. IEEE Trans. Power Electr. 27(11), 4734–4749 (2012)
J. Schiffer, R. Ortega, A. Astolfi, J. Raisch, T. Sezi, Conditions for stability of droop-controlled inverter-based microgrids. Automatica 50, 2457–2469 (2014)
A.M. Leite da Silva, L.C. Nascimento, M.A. da Rosa, D. Issicaba, J.A. Peças Lopes, Distributed energy resources impact on distribution system reliability under load transfer restrictions. IEEE Trans. Smart Grid 3(4), 2048–2055 (2012). https://doi.org/10.1109/TSG.2012.2190997
J.W. Simpson-Porco, F. Dörfler, F. Bullo, Synchronization and power sharing for droop-controlled inverters in islanded microgrids. Automatica 49(9), 2603–2611 (2013)
K. Subbarao, J. Fuller, K. Kalsi, A. Somani, R. Pratt, S. Widergren, D. Chassin, Transactive control and coordination of distributed assets for ancillary services. Technical report (Pacific Northwest National Laboratory (PNNL), Richland, WA, US, 2013)
K. Subbarao, J. Fuller, K. Kalsi, J. Lian, E. Mayhorn, Transactive control and coordination of distributed assets for ancillary services: controls, markets and simulations. Tech. Rep. PNNL-23764 (Pacific Northwest National Laboratory, 2015)
US Department of Energy, The potential benefits of distributed generation and rate-related issues that may impede their expansion (2007)
S.E. Widergren, K. Subbarao, J.C. Fuller, D.P. Chassin, et al., AEP Ohio gridSMART® demonstration project real-time pricing demonstration analysis. Tech. Rep. PNNL-23192, (Pacific Northwest National Laboratory, 2014)
T. Williams, K. Kalsi, M. Elizondo, L. Marinovici, R. Pratt, Control and coordination of frequency responsive residential water heaters, in Proceedings of, IEEE Power and Energy Society General Meeting (MA, USA, Boston, 2016)
D. Wu, T. Yang, A.A. Stoorvogel, J. Stoustrup, Distributed optimal coordination for distributed energy resources in power systems. IEEE Trans. Auto. Sci. Eng. 14(2), 414–424 (2017). https://doi.org/10.1109/TASE.2016.2627006
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Stoustrup, J. (2019). Distributed Control of Power Grids. In: Stoustrup, J., Annaswamy, A., Chakrabortty, A., Qu, Z. (eds) Smart Grid Control. Power Electronics and Power Systems. Springer, Cham. https://doi.org/10.1007/978-3-319-98310-3_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-98310-3_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-98309-7
Online ISBN: 978-3-319-98310-3
eBook Packages: EnergyEnergy (R0)