
Abstract
This paper focus on the geometrical application and discussion of robotics in the field of workspace. Workspace is referred to as the space which robotic arms can achieve with their own physical limitation. In this paper, a detailed geometrical and algebraic method is presented to analyze workspace curves for generalized 4-cable planar 3-degree-of-freedom cable-driven parallel mechanisms based on the antipodal theorem. In addition, this antipodal theorem is described by Voglewede as planar cable-driven parallel mechanisms are in force-closure condition if and only if the line p1p2 is completely surrounded by two sectors formed by two pairs of lines along each cable. The algebraic expression of workspace curves is deduced, which demonstrates that these curves are conics curves or straight lines (degenerated cases). Furthermore, quadratic features of these conics curves (i.e. ellipse, parabola and hyperbola) are discussed with various simulation cases. Based on the results of case study, the type of quadratic curves of this cable-driven mechanism is dependent on the determinant of conic matrix of curve expression. This paper also shows that the static workspace curves of planar cable-driven parallel mechanism relies on the structural parameters like the installation positions of cables.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Cable-driven parallel robot was formally presented and studied by Landsberger in 1984. Compared with rigid parallel robot, cable parallel robot employs flexible cables as force transmission and driven parts to manipulate the end-effector in space. Since cables can be wound around winches, cable robot features potential large workspace and ease of reconfiguration. In the field of robot application, cable parallel robots have been used in astronomy observation [1], medical rehabilitation [2], rescue [3] and wind tunnel testing [4].
Workspace of cable-driven mechanisms is the first issue to be defined and studied, which relates to the range of one mechanism to be used. In the literature, there are some studies about workspace of cable robots, such as wrench-closure workspace, force-closure workspace, wrench-feasible workspace and so on. In this paper, wrench-closure workspace is analyzed for planar cable-driven mechanisms. If the movable platform is in wrench-closure workspace, this platform can be maintained static with tensions along each cable.
Similar to grasping robots, cables can only exert tension to the movable platform of cable-driven mechanisms. Due to this unilinear force, some researchers had summarized the antipodal theorem from grasping robots to cable robots [5]. This paper will apply this theorem to further deduce the workspace curves of generalized planar cable robots. It is worth mentioning that this paper focuses on the 4-cable planar robot and the results can be extended to other planar robots as well.
The rest of this paper is organized as follows. Section 2 describes a planar 4-cable-driven robot with 4 cables as the research object. Section 3 deduces the curve expression of workspace of generalized planar cable robots and then presents cases to testify the theoretical conclusion in Sect. 4. Finally, the conclusion is drawn in Sect. 5.
2 Description of Generalized Planar 4-Cable-Driven Mechanism
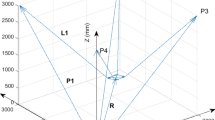
Because of the unilinear force of cables, the minimum number of cables should be 4 to completely constrain 3 degrees of freedom in one plane. As depicted in Fig. 1, the global and moving coordinate frames are set as frame (p1, x, y) and frame (Mb1, x′, y′). The origin of global coordinate frame is located at point p1(0, 0), and the origin of moving frame is at Mb1(0, 0). The rotation angle between these two frames is denoted as θ. Additionally, the lines are referred to as the cables with negligible mass. Based on the aforementioned definition, the coordinates of each attachment points are expressed as

Quadratic workspace boundaries (i.e. ellipse, parabola and hyperbola) with various parameters
3 Workspace Curve Expression Deduction
In order to apply antipodal theorem, the intersection points of each pair of cables are obtained firstly. Assume that the rotation angle is larger than 0, the intersection points between cables 1/4 and 2/3 are denoted as v14 (xv1, yv1) and v23 (xv2, yv2). The boundaries of wrench-closure workspace of this planar mechanism is dependent on collinearity of cable 1/3 and the line connecting intersection points v14 and v23.
With these intersection points, the potential boundary curve is obtained as

4 Simulation Result
Simulation tests are presented to testify the quadratic characteristics of workspace curves of planar cable-driven parallel mechanisms. Based on the expression mentioned in Sect. 3, the parameters are set in Table 1. When the rotation angle \( \theta \) changes from 0.1 to 1.57 (rad), the corresponding boundaries are depicted in Fig. 1.
5 Conclusion
This paper presents a detailed expression of workspace curve of generalized planar 4-cable-driven mechanisms based on antipodal theorem. These curves are proved to be quadric and called as conic curves. The results show that the type of conic curves is determined by the rotation angle and other structural parameters. In other words, the workspace of these cable robots is based on the structural variables of attachments only. Furthermore, this method can be further applied to other planar cable robots with multiple cables.
References
Nan, R., Li, D., Jin, C., et al.: The five-hundred aperture spherical radio telescope (FAST) project. Int. J. Mod. Phys. D 20(6), 989–1024 (2011)
Rosati, G., Gallina, P., Masiero, S.: Design, implementation and clinical tests of a wire-based robot for neurorehabilitation. Neural Syst. Rehabil. Eng. IEEE Trans. 15(4), 560–569 (2007)
Merlet, J.P., Daney, D.: A portable, modular parallel wire crane for rescue operations. In: 2010 IEEE International Conference on Robotics and Automation (ICRA 2010), pp. 2834–2839. IEEE, Anchorage (2010)
Zheng, Y.Q., Jiao, S.N., Yang, Y.B.: Analysis of dynamic and static properties of fluid-structure interaction for wires of WDPSS-8 robotic system in streamline flow field of low-speed wind tunnels. China Mech. Eng. 24(13), 1765–1772 (2013)
Voglewede, P.A., Ebert-Uphoff, I.: Application of the antipodal grasp theorem to cable-driven robots. IEEE Trans. Robot. 21(4), 713–718 (2005)
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities under grant #531107051087.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Tang, L. (2019). Quadratic Characteristics of Workspace Curves of Generalized Planar Cable-Driven Parallel Mechanisms. In: Cocchiarella, L. (eds) ICGG 2018 - Proceedings of the 18th International Conference on Geometry and Graphics. ICGG 2018. Advances in Intelligent Systems and Computing, vol 809. Springer, Cham. https://doi.org/10.1007/978-3-319-95588-9_213
Download citation
DOI: https://doi.org/10.1007/978-3-319-95588-9_213
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-95587-2
Online ISBN: 978-3-319-95588-9
eBook Packages: EngineeringEngineering (R0)