
Abstract
The present paper proposes a system oriented to the rehabilitation of carpal tunnel syndrome by means of the use of haptic devices with force feedback. The system, based on entertainment, handles different applications, as well as movements in a 3D graphic environment, which is devised with daily tasks that allow to develop skills and abilities to reduce patient´s affection. The system is designed with the integration of Unity3D, as well as Novint Falcon haptic device. In which, the patient interacts with the developed applications while receives force feedback. At the same time, the patient performs physiotherapeutic exercises that attack the affection in a proper manner to improve patient’s health. Experimental results manifest the system’s validity, which generates necessary and efficient exercises for the process of carpal tunnel rehabilitation. In addition, the system deploys a human – machine interaction oriented to the development of physic therapies.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays, the development of applications, as well as virtual environments, allows to generate rehabilitation systems for upper limb based on the entertainment and immersion of the patient with the environment [1]. The coalescence of technologic methods, such as: virtual reality and haptic devices to health systems, attracts the scrutiny of researchers and specialists in the development of novel alternatives to medicine, which generates potential benefits to the achievement of brand – new rehabilitation systems [2, 3]. Correspondingly, in [4], it is presented the implementation and association of different kinds of devices, such as: Leap Motion, Oculus Rift and Novint Falcon with the purpose of promoting a rehabilitation system based on entertainment and total immersion between the patient, as well as the interaction with virtual reality and augmented reality environments at the instant of performing the therapy.
Physic therapies need a validation point of its efficacy within the medicine, for that reason, presently, several rehabilitation techniques are questioned due to its abrupt mechanism, as well as its interaction technique; which, in most of the cases are vulnerable to the patient [5]. In this framework, the analysis and implementation of interfaces, which involve virtual environments, stimulate the patient in the achievement of objectives, as well as the performance of the therapy in its totality, which generates greater motor learning and less mind effort. In most of conventional rehabilitation methods, the patient does not conclude the rehabilitation cycle due to mental burden [6, 7].
Upper limbs present different kinds of affections inside its osseous composition, membranes or tissues due to its continuous movement, as well as its excessive contact with the environment. One of the most common affections in upper limbs is the Carpal Tunnel Syndrome (CTS).
Carpal Tunnel Syndrome is a disorder that is brought about the compression of the median nerve from the wrist to the hand. Its symptomatology is detected by means of a previous diagnostic. Its main causes are: diabetes, thyroid disorder, excess of alcohol, as well as arthritis. In the present day, the main cause of developing CTS is the excessive load in fine motor movement systems. Ergonomic designs, as well as the fabrication of wrist supports in technological systems play an important role at the prevention or treatment of CTS [8].
The affection, brought about CTS decreases productivity and life quality of a person at the time to perform functions in which a slight force or wrist extension is required [9]. The exercises for this type of affection are carried out by means of stretching postures and force compression in the wrist areas. In this way, the circulation within the tissues is improved; for this reason, non-surgical treatments are the first option at the time of detection of the CTS which is responsible for subjecting the patient to continuous rehabilitation sessions in which specific exercises are executed for the area of affection. Extreme cases of pain and evolution of the disease leads to surgical interventions, but these in turn promote much longer and expensive treatments [8, 10].
In this context, the work presents a system of entertainment and rehabilitation based on video games, which provides interaction capabilities based on the immersion and transparency of an ergonomic process to generate the comfort, as well as the required response by the movement of objects with different forces that generate rehabilitation exercises for carpal tunnel syndrome. Nowadays, simulation systems show complex and dynamic environments that focus on the development of a tool for transmitting forces with a virtual environment that results to be able to interact with the patient based on entertainment and rehabilitation as essential elements of the new systems of medicine and interactive rehabilitation [11].
2 System Structure
The system aims to provide a virtual reality interaction with the patient. The applications developed in Unity 3D software by means of a computer, integrated with the force feedback through the Novint Falcon device encourage the patient to accomplish a rehabilitation in a safe way in benefit to the performance of the patient’s movements, as well as to get an improve of the quality of life [12]. Figure 1 shows the block diagram of the system.

Rehabilitation system’s block diagram
The proposed interaction relates movements that are focused on the rehabilitation of carpal tunnel syndrome, which are immersed in intuitive visualization applications for efficient control and performance of the patient. Figure 1 describes the interaction flow of the system, in which, the graphic environments that are observed by the patient are analyzed by the neural system to generate movements by force feedback driven by the haptic device. In such a way, there is direct contact with the patient’s part of affection which allows to stimulate the nerves and muscles of the area of interest.
3 System Development
3.1 Graphic Environment
The medium performs a manipulation of the virtual objects in a real environment. In which, the target interacts with the entire environment of the interface with the determination to help to maintain healthy muscles, tendons and joints of the patient [8]. In the system, the main features of rehabilitation therapy for carpal tunnel syndrome are identified, to improve motor skills depending on the specific function of the environment and according to the specific movements to treat this injury in the patient [2, 5, 7].
Assisted therapies are selected from: (i) improving muscle strength (e.g., pulling or moving objects of different weight and size); (ii) improve eye-hand coordination (e.g., solving puzzles, mazes); (iii) increasing the range of motion (e.g., stretch rubber); and finally, (iv) increase sensitivity (e.g., touching objects with different textures) [2, 13]. Therefore, the graphic environments are able to interact with the patient, in order to evaluate the movements and the force in which the execution of the activities results in diminishing the disorders or afflictions of the fine upper limb.
3.2 Force Feedback
The virtual environments present an interface, adequate to generate force feedback in the affected area. Each of the impulses, made by the haptic device, create traction movements in the wrist joint area, which incite the exercises for the rehabilitation of carpal tunnel syndrome. Similarly, at the time of perform the mentioned movements, the patient interacts with the virtual environment. Thus, the patient plays while rehabilitates. The therapeutic exercises are repetitive and take different types of strength and position depending on the interaction of the environment and the task that is performed, which generates motivation and entertainment that eradicates the tedious mental burden of a conventional rehabilitation session in a clinical center.
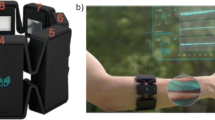
Novint Falcon is a device, able to generate forces in the X - Y - Z plane of the mobile reference system \( < R > \) of magnitude between 0 to 2.5 [lbf]; its work area comprises a spherical region of 10 [cm] radius. The patient’s hand is responsible for interacting directly with the operative end effector of the haptic device, from which, it directly receives forces fx, fy, as well as fz, in addition to the positions Px, Py, as well as Pz, with respect to the reference system \( < R > \) that composes rehabilitation exercises in the injury area. The device is moved adjacent to the involvement area to establish concentric forces. In this virtue, feedback of force plays an important role in the development of the present therapeutic method due to its generation of synchronous and specific movements for the condition.
The forces are specific in each level of the applications in order to directly contribute to the recovery of the condition without causing collateral damage to the limbs in movement. The forces, exerted on the X - Y - Z axes impart on the affectation area basic exercises of flexion, extension and grip; the composition of these exercises originate the needed therapy to aim to treat carpal tunnel syndrome, Fig. 2 represents the interaction of the haptic device with the area of affection to generate the necessary therapeutic exercises for rehabilitation. The movements do not generate rotation because the degrees of freedom of the haptic device does not allow it.

Interaction of Novint Falcon with the affection zone
4 Rehabilitation Session
The development of exercises, oriented towards the recovery of the carpal tunnel syndrome, finds different types of training applied to patients in traditional rehabilitation sessions developed in medical centers. The complex physiological structure of the wrist requires exercises with a certain degree of inclination and strength, Fig. 3 details the basic exercises in which the rehabilitation of carpal tunnel syndrome is developed; (a) details the upper neutral position of the hand at a 90° inclination and (b) describes the horizontal neutral position of the hand; These exercises are performed repetitively in order to improve circulation in the tissues and areas of the wrist to eliminate significantly the symptoms of the carpal tunnel [9].

Basic exercises for carpal tunnel rehabilitation
The interaction with the wrist or affection area is achieved through the proper position control in the translation and application of forces. These positions are composed of different movements at different strength and magnitude within the development of the application. The main objective of the exercises is to promote recovery and training of the Carpal nerve through the performance of the Carpal ligament [9]. The exercises and non-surgical methods are composed of different exercises that are capable to generate a total rehabilitation, in analysis of stretching exercises as well as the correct implementation of the rehabilitation instructions considerably reduce the musculoskeletal disorders of the hand and medium carpal [8].
The exercises for carpal tunnel syndrome rehabilitation are numerous. However, within them, there are effective methods and movements in the rehabilitation session, in Fig. 4 the main rehabilitation exercises used in conventional carpal tunnel methods are described in which it is represented: (a) palm extended to the left, (b) palm extended to the right, (c) flexion of fist and palm and (d) extension of arms, fingers and palm [8].

Exercises of (a) palm extended to the left, (b) palm extended to the right, (c) flexion of the fist and palm and (d) extension of arms, fingers and palm
All these exercises allow to reach a greater range of movement, as well as manual sliding for a complete rehabilitation session. The main exercises consist of the flat and vertical movement of the wrist, where each one of them describes a better behavior and recovery of the patient. Figure 5 describes vertical (a) ascending movements and (b) vertical descending movements where there is a greater range of coverage in CTS rehabilitation [8].

Movements (a) vertical ascending and (b) vertical descending.
The movements and exercises, which are described, are originated in the video game, which provides a force feedback with different position and magnitude, as well as the quality of the action to encourage participation and concentration. Each game is designed to perform a parameter of hand movement in range, speed of movement, or strengthening of the affected areas [14]. The effectiveness of the therapy focuses on capturing the patient’s attention through the inclusion of visual objects in the game combined with force feedback, exercises and movements that are aimed to improve the patient’s abilities whose mechanisms determine the success of the therapy.
5 Virtual Interface
The virtual environments are implemented to generate rehabilitation exercises in an effective way, focused on daily tasks that create entertainment, immersion of the patient with the environment and eliminates mental loads. The interaction of the patient with 3D graphic environments generates the appropriate rehabilitation movements as specified in Figs. 6, 7 and 8 respectively, which creates improvement of strength and resistance gain in the muscles, tendons and joints of the patient. The virtual system includes two interfaces in charge of interacting with the patient based on precision games for achieving objectives in order to obtain the established exercises with a different strength and direction.

First environment’s virtual interface

Handling of objects

Second environment’s virtual interface
The initial part of the rehabilitation session is aimed at carrying out the appropriate exercises for rehabilitation mentioned in Sect. 4 as a method of initialization, familiarization and warm-up of the muscles of the hand so that the patient has a favorable performance with the environment and the device, the first environment consists in the manipulation of objects of different weight towards a container where each of them is deposited consecutively and at random by the user. At the moment of performing this interaction, concentric forces of different magnitudes are applied to the patient’s wrist, producing the appropriate rehabilitation exercises. Figure 6 presents the interface of the first environment in which the methodology described above is developed, Fig. 7 shows the consecutive handling of the objects of different weight towards the container.
In the second instance, the patient interacts with a different virtual environment, in which, the purpose is to order each of the objects inside the room where each of them has different weights. In turn, with greater weights than those specified in the first interface, this application allows to reinforce the rehabilitation exercises carried out in the previous steps. In Fig. 8(a) the disorganized room is presented, Fig. 8(b) represents the movement of the object with the greatest weight, Fig. 8(c) indicates the displacement of the object with the least weight, finally, Fig. 8(d) presents the fulfillment of the final objective defined as the oganized room.
6 Experimental Results
According to the tests carried out, the feedback of forces allows specific movements of rehabilitation according to the medical parameters required for the treatment of Carpal Tunnel Syndrome (CTS). The position of the movements of the haptic device has been taken into account as well as the interaction of the patient with the applications developed to relate the movements that the patient performs with the force generated by the haptic device.
Figure 9 describes the movements performed on the x-axis between the patient and the haptic device, where at the beginning of the rehabilitation session the exercises described in Fig. 4(a), (b) are performed; the displacement of the patient’s affliction site (blue) follows directly to the feedback of force exerted by the haptic device (red), therefore the instructions arranged to be performed on this axis are fulfilled.

X – axis movements (Color figure online)
Similarly, Fig. 10 describes the movements produced in the y-axis and where the detailed displacements are made in Fig. 5, which continues with the familiarization routine of the patient with the device; the displacement of the place of patient’s affection (blue) is according to the movement generated by the device (red), in this way, the rehabilitation exercises proposed for this axis are fulfilled.

Y – axis movements (Color figure online)
Correspondingly, Fig. 11, describes the movements made by the patient on the Z axis (blue) vs the feedback of forces delivered by the haptic device (red), the graph represents the fulfillment of the exercises described in Fig. 3; with which the main movements for the rehabilitation of carpal tunnel syndrome (CTS) are carried out.

Z – axis movements (Color figure online)
Finally, when executing the application of daily tasks, Fig. 12, presents the displacement of the objects within which the different weights exerted by each manipulated body are demonstrated; in such virtue the execution of the movements described in Fig. 4(c) and (d) is demonstrated.

Manipulation of objects with different weight
7 Conclusions
Force feedback promotes the necessary movements for the treatment of the condition, provides the number of repetitions of each exercise according to the rehabilitation session, in such a way that the present tool has the potential to serve as a complement to traditional rehabilitation. The obtained results provide a necessary tool for the specialist to perform a pertinent assessment of the patient’s condition, as well as monitoring the progress of the rehabilitation of the patient.
As future work, the implementation of this tool is proposed in patients suffering from this type of condition, to obtain an assessment of the usability of the system.
References
Andaluz, V.H., Salazar, P.J., Silva, M., Escudero, M., Bustamante, C.: Rehabilitation of upper limb with force feedback. In: 2016 IEEE International Conference on Automatica (ICA-ACCA), Curicó, Chile, pp. 99–104 (2016)
Ramírez-Fernández, C., Morán, A.L., García-Canseco, E.: Haptic feedback in motor hand virtual therapy increases precision and generates less mental workload. In: 2015 9th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth), Istanbul, pp. 280–286 (2015)
Ramírez-Fernández, C., García-Canseco, E., Morán, A.L., Orihuela-Espina, F.: Design principles for hapto-virtual rehabilitation environments: effects on effectiveness of fine motor hand therapy. In: Fardoun, H.M., Penichet, V.M.R., Alghazzawi, D.M. (eds.) REHAB 2014. CCIS, vol. 515, pp. 270–284. Springer, Heidelberg (2015). https://doi.org/10.1007/978-3-662-48645-0_23
Andaluz, V.H., et al.: Virtual reality integration with force feedback in upper limb rehabilitation. In: Bebis, G., et al. (eds.) ISVC 2016. LNCS, vol. 10073, pp. 259–268. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-50832-0_25
Zepeda-Ruelas, E., Gudiño-Lau, J., Durán-Fonseca, M., Charre-Ibarra, S., Alcalá-Rodríguez, J.: Control Háptico con Planificación de Trayectorias Aplicado a Novint Falcon. La Mecatrónica en México 3(2), 65–74 (2014)
Haarth, R., Ejarque, G.E., Distefano, M.: Interfaz HÁPTICO aplicada en la manipulación de objetos. In: Instituto de Automática y Electrónica Industrial, Facultad de Ingeniería Universidad Nacional de Cuyo (2010)
Hamza-Lup, F.G., Baird, W.H.: Feel the static and kinetic friction. In: Isokoski, P., Springare, J. (eds.) EuroHaptics 2012. LNCS, vol. 7282, pp. 181–192. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-31401-8_17
Uribe-Quevedo, A., Ortiz, S., Rojas, D., Kapralos, B.: Hand tracking as a tool to quantify carpal tunnel syndrome preventive exercises. In: 2016 7th International Conference on Information, Intelligence, Systems & Applications (IISA), Chalkidiki, Greece, pp. 1–5 (2016)
Silişteanu, C.S., Crăciun, D.M., David, M.: The importance of the sensor devices in the recovery of the patients with the carpal tunnel syndrome. In: 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, pp. 426–430, (2016)
Arita, S., Hashshizume, H., Honda, M.: A new approach to clarify the fuzziness of medical diagnosis by diagnostic layers — a diagnostic system for Carpal Tunnel Syndrome with two layers of diagnostic filters using clinical indicators. In: 2014 Joint 7th International Conference on Soft Computing and Intelligent Systems (SCIS) and 15th International Symposium on Advanced Intelligent Systems (ISIS), Kitakyushu, pp. 845–850, (2014)
Renon, P., Yang, C., Ma, H., Cui, R.: Haptic interaction between human and virtual iCub robot using Novint Falcon with CHAI3D and MATLAB. In: 32nd Chinese Control Conference (CCC), Xi’an, pp. 6045–6050 (2013)
Song, Z., Guo, S., Yazid, M.: Development of a potential system for upper limb rehabilitation training based on virtual reality. In: 2011 4th International Conference on Human System Interactions (HSI), Yokohama, pp. 352–356 (2011)
Gupta, A., OMalley, M.K.: Design of a haptic arm exoskeleton for training and rehabilitation. IEEE/ASME Trans. Mechatron. 11(3), 280–289 (2006)
Adamovich, S., et al.: A virtual reality–based exercise system for hand rehabilitation post-stroke. Teleoper. Virtual Environ. 14, 161–174 (2005)
Acknowledgement
The authors would like to thanks to the Corporación Ecuatoriana para el Desarrollo de la Investigación y Academia – CEDIA for the financing given to research, development, and innovation, through the CEPRA projects, especially the project CEPRA-XI-2017- 06; Control Coordinado Multi-operador aplicado a un robot Manipulador Aéreo; also to Universidad de las Fuerzas Armadas ESPE, Universidad Técnica de Ambato, Escuela Superior Politécnica de Chimborazo, and Universidad Nacional de Chimborazo, and Grupo de Investigación en Automatización, Robótica y Sistemas Inteligentes, GIARSI, for the support to develop this paper.
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Tamayo, M., Salazar, P.J., Bustamante, D.C., Silva, S.M., Escudero, V.M., Andaluz, V.H. (2018). Virtual Rehabilitation of Carpal Tunnel Syndrome Through Force Feedback. In: De Paolis, L., Bourdot, P. (eds) Augmented Reality, Virtual Reality, and Computer Graphics. AVR 2018. Lecture Notes in Computer Science(), vol 10851. Springer, Cham. https://doi.org/10.1007/978-3-319-95282-6_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-95282-6_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-95281-9
Online ISBN: 978-3-319-95282-6
eBook Packages: Computer ScienceComputer Science (R0)