
Abstract
Our hands are the primary body part to interact with objects around us and perform most daily activities. Consequently, a disability of the hand after a stroke or an injury is one of the most severe restrictions to an independent life. To regain the function of the hand, physical therapy is used. Since the resulting rehabilitation process is slow and exhausting, there is a demand to use technology to create a way for patients to train medical exercises independently.
In this paper, a rehabilitation system is presented that allows the patient to independently train medical wrist exercises while playing a serious video game. To identify the requirements, an analysis of previous systems is presented. The designed system consists of a haptic robot with a mechanical support structure that records the hand movements and inputs them into the rehabilitation game. The wrist and forearm movements of flexion & extension, radial & ulnar deviation and supination & pronation can be trained through this. To allow for the biggest possible usability throughout the therapy process, haptic feedback is used to either support the patient’s movement or offer resistance, which especially allows the use of passive training in the early stages of therapy.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
A stroke is a drastic event in the life of everybody who had to undergo such an incident. 2.4% of the male and 2.6% of the female population in Germany survived a stroke [4]. In addition to the immediate medical consequences, strokes are also a major reason for disabilities of the upper extremities. 38.4% of male and 39.2% of female stroke victims experience hemiparesis as an acute stroke symptom [6].
While such an occurrence in itself already requires the patient to run through immediate serious medical interventions, the process of fully recovering to the former medical status can last for months or even years. This is not only physically exhausting but also poses a serious challenge to the mental state of the patient. A person who was previously healthy is suddenly in permanent need of support to manage activities of daily living. The slow process of regaining the ability to perform the basic movements necessary to carry out trivial tasks that once were ordinary can become very frustrating for the patient.
Conventional physical therapy aims to restore motor functions as well as coordination through movement exercises done by the patient with the help of a therapist. While this process can significantly improve the medical state of the patient, it requires the constant attendance of a therapist or a doctor. As a result, physical therapy is a very staff-intensive and expensive process. This leads to challenges in the medical sector which is often understaffed and overburdened. Consequently, the patient often does not receive as many therapy sessions as would be necessary for his medical state or the interval of therapy sessions is larger than it should be. Therefore the therapy that is essential for the patient to recover his health and thereby regain his independent life back often has a slow progress rate and needs a lot of time. This can result in frustration and even depression and can lead to premature disengagement with the therapy.
An approach to solve that problem is the use of a force feedback capable haptic robot to support the physical therapy. Such a robot can be used by the patient to perform movement exercises independently of a therapist. By that, it is not intended to replace the therapist with the robot but to use the robot as an additional tool in the therapy. The therapist can give the patient exercises to train with the robot and then use the measured data to assess the rehabilitation progress. The gained independence results in an improved mental state of the patient and allows the therapist to focus on diagnosing the patient and developing a therapy plan while the patient can partially train the exercises on his own.
A further approach to improve the therapy process is to combine the haptic robot with a serious video game. Through this, the repetitive and arduous exercises are placed in an engaging and motivating environment. Furthermore, known mechanics from video games can be utilized by this. To beat a level or to set a new high-score in a video game can be a far more motivating goal than to successfully perform a therapeutic exercise. While the training of physical therapy may be seen as work, a serious video game has the potential to change this perception and make training an entertaining activity that people enjoy doing.
Seven different games for haptic desktop systems were found and analyzed to understand the current state of research and to identify the requirements and needs for the design process. Four of them [1, 3, 7, 9] focused on the specific task of drawing and writing or for the hand to follow a trajectory. The other three systems [2, 5, 10] focused on more general hand movements in different game environments, like a virtual ice hockey system or a spaceship in a blood vessel.
After analyzing these systems, it was found that most systems do not provide sources for the trained movements. As a result, an analysis of requirements from physical therapy was conducted, which led to the selection of specific motions which were already used in conventional therapy and thereby have a proven benefit for the rehabilitation process. It was also found that most analyzed games are not more than a virtual simulation of the used movements. To allow for the biggest possible engagement of the patient, it was decided that the developed serious video game, while having the main focus on the trained movements, also should contain some amount of decision making.
2 Game Design
2.1 Used System
The touch X is a stationary haptic desktop device that can input precise positional and rotational information into a computer. Moreover, the touch X also can be used as an output device to apply forces or guide and restrict movements. The game was created in the Unity game engine.
2.2 Game-Play
Since the movement itself is already a challenge for the patient, the game mechanics should not be simple and easy to understand. To achieve this, the concept of a microworld [8] was deployed. The resulting game should be real enough so the situation and objective can be understood immediately but simple enough to understand the rules and the goal of the game. Subsequently, the game is a simplified version of a real-life scenario.
The chosen game scenario is a vastly simplified driving simulation. [Fig. 1.] It is a situation that everybody can identify and understand immediately. The objective of preventing a crash and staying on the road is natural in this situation and requires no further explanation, even for persons who have never driven a car before.

Screenshot of the game-play
The central game object is a police car that is driving on a multi-lane highway. The car is constantly moving forward and thereby travels through the in-game environment. There are also other cars driving on the highway at a slower speed which have to be bypassed to prevent an accident. Therein lies the central game-play challenge, which is to change the lane the car is driving in to always be on the free lane. This lane change is induced by the patient through the successful performance of a medical exercise. An exercise counts as successfully executed if the patient rotates his hand from the middle, neutral position to a predetermined angle threshold. A level is finished if the patient avoids all collisions until a timer runs out.
2.3 UI
To avoid frustration over an unclear game mechanic, it is essential to give clear feedback to the patient while the game is played. To achieve that, a graphical interface [Fig. 2.] was created to permanently provide information on the current position of the patient’s hand in relation to the neutral position and the angle thresholds to the left and right. This is implemented through four coloured lines in the top left corner of the screen. The blue line in the upright position represents the neutral position. To the left and the right, two red lines represent the angle difference the patient has to overcome to successfully complete the exercise. While these lines are always stationary, the green line moves according to the patient’s inputs. This line turns yellow if a movement exercise was started but is not finished yet.

Graphical interface a) Next exercise can be performed b) Patient has to return to neutral position
2.4 Adjustable Parameters
To allow the biggest possible usability throughout the therapy process, a number of game parameters can be freely adjusted for each level individually. Through that, the difficulty of the game and the difficulty of the movement exercise can grow with the progress the patient makes to keep the game interesting and challenging (Table 1).
Furthermore, the strength and mode of the force feedback can be freely adjusted. Three feedback modes are available. In the passive game mode, the hand of the patient is moved through the robot, which enables the system to employ passive training. In the active game mode, no force feedback is applied, and the touch X robot is used as an input device only. The active resistance game mode applies a force against the movement direction of the patient’s hand to train strength and endurance. For all game modes, the amount of force is individually adjustable for each level.
2.5 Input and Output
For the integration of the developed system into the therapy process, it is necessary that the setup and use of the system can be done with only basic computer skills. To allow for an easy way to alter the adjustable parameters, two different input methods are provided. A fast and simple setup can be made in the menu of the game to allow for spontaneous use of the system. This menu also allows the patient to directly recreate the last used settings. For more complex inputs, an input document [Fig. 3.] exist, that is based on a standard spreadsheet document. Through that, a level structure can be created were each parameter can be set for each level individually. As a result, it is possible to always adjust the difficulty of the game and the trained movements to the specific needs and capabilities of the patient.

Input document
Furthermore, an output document exists, where important data for each movement, like direction, travelled distance and speed, is automatically tracked to allow the patient to receive feedback on his improvement and enable the therapist to assess the therapy progress. To make this easily usable, the output document also uses the format of a standard spreadsheet document.
2.6 Forearm Support Stand
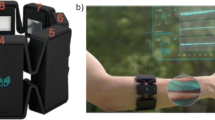
Additionally to the serious video game, a mechanical stand [Fig. 4.] for the forearm of the patient was developed and constructed. This stand serves multiple purposes. Firstly it gives the patient physically support while playing, which is important since the strength of the upper extremity is severely limited after a stroke. Secondly, it allows for a better contact between the hand of the patient and the robot by providing a bigger surface to grasp the robot in order to play the game. Thirdly it has the role of restricting the possible movements, so no other motions than the desired medical exercise are possible. This is especially important for passive training, where the hand of the patient is moved by the robot while the patient himself can have very limited control of the hand. It is necessary to restrict the movement since the touch X cannot directly apply torque. Since the trained movements are, for the most part, rotatory motions, attachment points for the robot are integrated into the forearm support stand, which creates a stable axis of rotation for each movement exercise.

System in the configuration for the ulnar and radial deviation game-mode
3 Conclusion and Future Work
In this work, a serious video game was developed that allows the patient to independently train medical exercises with the use of a haptic robot. The game features a simplified driving simulation in which the patient controls a car on a highway through the performance of medical exercises. The difficulty of the game and the exercises can be freely adjusted to allow for the biggest usability throughout the therapy process. The data for all movements are logged to be used by the therapist to evaluate the progress of the therapy. All inputs and outputs happen through standard spreadsheet documents or in the game itself to allow for an easy use of the system. Additionally, a mechanical support stand was constructed to support the patient while playing and restrict the possible movements.
To further verify the system and to receive feedback from therapists and patients, a patient trial is currently prepared.
References
Auguste-Rampersad, D., Medford, G., Kanneh, A.: Haptics and post stroke rehabilitation of the hand: immersive gaming using haptics to motivate patients to continue repetitive exercises needed for rehabilitation after stroke. In: 2018 IEEE Symposium on Computer Applications Industrial Electronics (ISCAIE), pp. 422–427 (2018). https://doi.org/10.1109/ISCAIE.2018.8405510
Broeren, J., Sunnerhagen, K.S., Rydmark, M.: Haptic virtual rehabilitation in stroke: transferring research into clinical practice. Phys. Ther. Rev. 14, 322–335 (2009). https://doi.org/10.1179/108331909X12488667117212
Covarrubias, M., Bordegoni, M., Cugini, U.: Haptic trajectories for assisting patients during rehabilitation of upper extremities. Comput. Aided Des. Appl. 12, 218–225 (2015). https://doi.org/10.1080/16864360.2014.962434
Robert Koch-Institut. Gesundheit in Deutschland. Gesundheitsberichterstattung des Bundes. Gemeinsam getragen von RKI und Destatis. Berlin (2015)
Lafond, I., Qiu, Q., Adamovich, S.V.: Design of a customized virtual reality simulation for retraining upper extremities after stroke. In: Proceedings of the 2010 IEEE 36th Annual Northeast Bioengineering Conference (NEBEC), pp. 1–2 (2010). https://doi.org/10.1109/NEBC.2010.5458130
Lisabeth, L.D., et al.: Acute stroke symptoms. Stroke 40(6), 2031–2036 (2009). https://www.ahajournals.org/doi/abs/10.1161/STROKEAHA.109.546812, https://doi.org/10.1161/STROKEAHA.109.546812
Pareek, S., Chembrammel, P., Kesavadas, T.: Development and evaluation of haptics-based rehabilitation system. In: 2018 International Symposium on Medical Robotics (ISMR), pp. 1–6 (2018). https://doi.org/10.1109/ISMR.2018.8333298
Rieber, L.P.: Seriously considering play: Designing interactive learning environments based on the blending of microworlds, simulations, and games. Educ. Technol. Res. Devel. 44, 43–58 (1996)
Wang, X., Li, J.: Feasibility of a tele-rehabilitation system with corrective-force. In: 2011 International Conference on Virtual Reality and Visualization, pp. 259–262 (2011). https://doi.org/10.1109/ICVRV.2011.14
Yang, X., et al.: Hand tele-rehabilitation in haptic virtual environment. In: 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 154—149 (2007). https://doi.org/10.1109/ROBIO.2007.4522150
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Lamprecht, E., Abbasimoshaei, A., Kern, T.A. (2023). Development of a Wrist Rehabilitation Game with Haptic Feedback. In: Cunha, A., M. Garcia, N., Marx Gómez, J., Pereira, S. (eds) Wireless Mobile Communication and Healthcare. MobiHealth 2022. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 484. Springer, Cham. https://doi.org/10.1007/978-3-031-32029-3_6
Download citation
DOI: https://doi.org/10.1007/978-3-031-32029-3_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-32028-6
Online ISBN: 978-3-031-32029-3
eBook Packages: Computer ScienceComputer Science (R0)