
Abstract
Root system defined as the “Hidden Half” of plant, has not attracted a great deal of attention for a long time from plant biologists. In recent years, through the new innovative techniques, root system has been deeply studied allowing all to reveal its structure, function, but also its genetic potential, which could be manipulated to improve crop yield and plant survival in stressful environments. Plant root system has three major functions: site of water and nutrients acquisition from the soil, essential support for plant anchoring and sensor of abiotic and biotic stresses. It also points out secondary functions such as photoassimilates storage, phytohormones synthesis and clonal propagation.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


1 Introduction
Root system defined as the “Hidden Half” of plant, has not attracted a great deal of attention for a long time from plant biologists. In recent years, through the new innovative techniques, root system has been deeply studied allowing all to reveal its structure, function, but also its genetic potential, which could be manipulated to improve crop yield and plant survival in stressful environments. Plant root system has three major functions: site of water and nutrients acquisition from the soil, essential support for plant anchoring and sensor of abiotic and biotic stresses. It also points out secondary functions such as photoassimilates storage, phytohormones synthesis and clonal propagation.
Root system growth and development depend on endogenous genetic program as well as biotic and abiotic environmental factors (Forde and Lorenzo 2001). For example, nutrient status of the plant and/or photosynthate supplies (intrinsic factors) and nutrients distribution in the soil and/or soil texture and/or water potential and/or microorganisms and/or salinity (extrinsic factors) highly modified root system (Walch-Liu et al. 2006). This considerable root plasticity provides to plants to maximize both reproductive success and survival, especially in severe environments.
Root system of monocots is more complex than that of dicotyledoneous plants. Monocots display a “fibrous root system”, with several moderately branching roots growing from the stem. In particular, fibrous root system of monocots is characterized by having a mass of similarly sized roots, consisting of a primary root emerging from embryo, a variable number of seminal roots that originate post-embryonically and crown roots emerging from the stem. All major root types form lateral roots and undergo higher-order branching (Hochholdinger et al. 2004; Nibau et al. 2008). In cereals such as maize, rice and wheat, lateral roots arise from the phloem pole pericycle with a contribution of endodermis (Hochholdinger and Zimmermann 2008). In contrast, dicots have a “taproot system”, which is characterized by having a primary root (the taproot) emerging from the embryo and growing downward. As roots mature, quiescent cells within pericycle begin competent to sustain a set of divisions to form lateral root primordia (Malamy 2009). Lateral roots elongate and are further undergone to reiterative branching to form secondary and tertiary laterals. Ultimately, adventitious roots at the shoot-root junction can be formed (Hochholdinger et al. 2004; Nibau et al. 2008). Newly emerged roots are highly sensitive to environmental signals such as gravity, which drives root growth towards moisture and nutrients in the soil (Muday and Rahman 2007).
Fibrous roots are excellent for soil erosion control because the mass of roots cling to soil particles, while taproots anchor plants deeply helping to prevent wind damages and stabilize plants especially in beach and sand dune areas. Taproots are often modified to store starches and sugars as shown in sweet potatoes, sugar beet or carrot. Taproot systems are also important adaptations for searching for water from deeper sources, conferring great drought resistance compared to fibrous ones. Whereas, fibrous roots near the soil surface, may absorb quickly water also from even a light rainfall.
1.1 Root System Analysis
Root system analysis can be approached in terms of structure, morphology and architecture. Root structure takes in account all anatomical aspects of the individual roots; while root morphology deals with the surface traits of the individual root axis, such as length, biomass, diameter, surface area, root specific length, fineness and root density. It also includes epidermal features such as root hairs, root headset, root axis ripple, and cortical senescence. Finally, root architecture defines the spatial configuration of root system in the soil (Lynch 1995). Next paragraphs deal with root morphology and architecture whose analysis is carried out by WinRhizo system, the image analysis system described in this chapter.
1.2 Root Morphology and Its Parameters
Root morphology was described through the estimation of several parameters, which allow better understanding of root functional aspects, especially those related to resources acquisition from soil. Root length (LR) is a morphological parameter that best describes root ability to explore the soil (Ryser 1998) and to acquire water and nutrients. In particular, LR is positively correlated with ions absorption with low mobility such as phosphate (Newman and Andrews 1973). Change in root length (RL) is determined by two morphological components: root biomass (RB, g) and specific root length i.e. root length per unit root dry weight (SRL, cm g−1) as described by the following relationship:
To better emphasize the importance of root length in resources acquisition, it has been proposed the root length ratio (RLR) parameter, i.e. root length per unit of the plant’s dry biomass. The RLR defines “how much plant biomass is transformed into root length”, or better, “how much plant invests in root system”. Higher RLR value allows the plant a greater soil exploration and, consequently, an increased resources acquisition. Therefore, this parameter is a good index to describe the plant’s ability to acquire soil resources. For this reason, it is strongly modulated by changes in nutrient and water availability: it increases under lower nitrate concentrations (Ryser and Lambers 1995; Sorgonà et al. 2005) and drought stress in drought-tolerant bean landrace (Abenavoli et al. 2016).
Change in RLR is determined by different morphological components: root mass ratio i.e. relative biomass allocation to root per unit of plant’s dry biomass (RMR, g g−1) and specific root length, i.e. root length per unit root dry weight, (SRL, cm g−1), which, in turn, depends on root fineness, i.e. root length per unit root volume (RF, cm cm−3) and tissue density, i.e. root dry mass per unit root volume (RDT, g cm−3) (Ryser 1998). The relationships among these parameters are the following:
Therefore, plants may produce longer roots either by increasing biomass allocation to roots, as demonstrated under a low supply of nitrogen (Ryser and Lambers 1995; Sorgonà et al. 2005, 2007a) or by increasing root fineness and/or reducing root tissue density, leaving biomass allocation unchanged (Ryser 1998).
In particular, RMR parameter is a relative index, which indicates the biomass allocation towards root that is modified by environmental conditions such as nutrient availability (Ryser and Lambers 1995).
On the other hand, the SRL is a root parameter related to the ability of species or genotypes to effectively spend their photosyntates for the limiting resources acquisition. Then, the SRL is a root trait, which better explains the root system investment in terms of costs (biomass) and benefits (length). Therefore, plants with high SRL achieve the same purpose in terms of elongation but with lower costs (less biomass) than those with low SRL, showing more efficiency in mineral resources acquisition. However, SRL is a “complex parameter” determined both by the root fineness (FR) and the root total density (DTR), which can often nullify the SRL variation in response to environmental conditions (Ryser 1998).
In particular, the fineness (FR) is functionally correlated with the adverse environmental conditions and, in particular, with the habitats. On the other hand, root tissue density (RTD) is the other component of SRL, whose modulation can increase the plant’s ability to capture soil resources (high length or root length ratio) without changing biomass allocation or root fineness. For example, higher RLR was maintained by lower root tissue density at different N and P (Ryser and Lambers 1995) and nitrate levels (Sorgonà et al. 2007a). Furthermore, this parameter appears to be negatively correlated with growth rate of the plant species (Wahl and Ryser 2000).
1.3 Root System Architecture
Root system architecture (RSA) defines the spatial arrangement of root axes in soil (Lynch 1995) and varies hugely among species and within species, also matching to different environment where plants grown (Loudet et al. 2005; Osmont et al. 2007). The importance of root architecture relies on its closely relationship with plant yield performances (Lynch 1995) and nutrient acquisition efficiency (Sorgonà et al. 2005, 2007b).
Different techniques are developed for studying root architecture both in lab and field conditions. Several phenotyping systems use 2D imaging captured by cameras (Le Marie et al. 2014) or flatbed scanners (Adu et al. 2014), following 3-D root architecture analysis by topological (Fitter 1991; Sorgonà et al. 2007b), fractal (Eghball et al. 1993; Lynch and Van Beem 1993; Berntson 1994) and computer simulation analysis (Lynch and Nielsen 1996). Further, 3D root architecture has been captured in plants grown on gel by 3D laser scanners (Fang et al. 2009) and digital cameras (Iyer-Pascuzzi et al. 2010), or in pot filled with soil by X-ray computed tomography (Hargreaves et al. 2009; Tracy et al. 2010) and magnetic resonance imaging (Jahnke et al. 2009) and in field by magnetic resonance imaging (Zhou and Luo 2009), magnetic resonance imaging-positron emission tomography (Jahnke et al. 2009), ground-penetrating radar (Hruska et al. 1999; Hagrey 2007), manual (Oppelt et al. 2000) and digital measurements (Danjon et al. 1999; Di Iorio et al. 2005).
Next paragraphs detail on topological and fractal analysis of root architecture by 2-D images captured and analyzed with WinRhizo system.
1.4 Topological Analysis
The topology, which is a non-metric aspect of root architecture, refers to the hierarchical order by which the individual axes are connected to each other in determining the degree or the mode of branching of roots. The topology is analyzed by quantification of different non-metric parameters such as the links, the magnitude (μ) of the entire root system, the altitude (a) and the total exterior pathlength (Pe) (Fitter 1996). The links define root segments between two nodes or between a vertex and a node. The links are divided into those with meristem end, exterior links, and those that combine two branching points, internal links (II). In turn, the exterior links that connect with the interior links are defined exterior-interior links (EI), while if they bind with other exterior links are called exterior-exterior links (EE) (Fig. 2.1).

Root system represented by topological model. EE: exterior-exterior link; EI: exterior-interior link; II: interior-interior link
The altitude is the number of links in the longest path through the system starting from the base; while the Pe is the sum of all the routes from the base toward the exterior links (Fig. 2.2a). The slope of the linear curve obtained by plotting the values of a (Loga) or Pe (LogPe) as a function of magnitude (Logμ) is used as topological index (TI) (Fig. 2.2b). High slope values indicate a herringbone-type branching pattern of root system, while low slope values are typical of the dichotomous model (Fig. 2.2b).

(a) Dichotomous- and herringbone-type root systems with the corresponding topological parameter values: μ, magnitude; a, altitude; Pe, total exterior pathlength. (b) Loga vs Logμ plot where the herringbone- and dichotomous-type exhibit the lowest and highest slope values, respectively
Through the computer simulation, Fitter (1991) pointed out that “the exploitation efficiency” (soil volume within the depletion areas divided the root volume) was positively correlated with TI. In particular, herringbone-type root systems are more efficient in exploring and exploiting the edaphic resources while the dichotomous pattern is more efficient in nutrient transport within roots and less expensive for its large number of high magnitude links.
To support the simulation results, several experiments pointed out that root topology exhibited dichotomous traits as mineral nutrients increase in the soil and/or nutrient solution (Fitter and Stickland 1992; Sorgonà and Cacco 2002; Sorgonà et al. 2005).
1.5 Fractal Analysis
Fractal geometry is an interesting geometrical system for the description of very complex and modular natural objects. Root system exhibits a modular growth. Hence, the fractal geometry, by scaling relations, is a promising technique to analyze and quantify the complexity of root architecture both from the structural point of view that functional as, for example, the root system ability to occupy the soil volume.
Fractal analysis for root architecture utilizes box counting method and the eq. N(L) = KL –D where L is the length of the box side and N(L) is the number of boxes of size L needed to cover the root (Tatsumi 2001; Walk et al. 2004; Eshel 1998). By linear regression of N(L) vs L levels are computed the slope (D) and intercept log K. D is the fractal dimension (FD) and log K is associated with fractal abundance (FA). The FD is closely related with root length and biomass (Fitter and Stickland 1992; Lynch and Van Beem 1993), root size (Eghball et al. 1993; Berntson 1994; Lynch and van Beem 1993), root length density (Berntson 1994), root topology (Fitter and Stickland 1992), root length, surface area and branching frequency (Costa et al. 2003), nutrient availability (Eghball et al. 1993), drought tolerance (Wang et al. 2009) and ecophysiological strategies of fruit crops (Oppelt et al. 2000).
2 The WinRhizo System
The WinRhizo system includes:
-
a calibrated color optical scanner to acquire images;
-
a positioning system to ensure a good arrangement of the root before starting scanner acquisition;
-
a work station which allows to store and analyze image by software after acquisition.
The system should use a specific flat-bed scanner as image acquisition devise (Fig. 2.3a), which is characterized by a lighting system placed on both scanner glass parts (top and bottom). Since the system has to acquire macroscopic objects (root and leaf), an optical scanner allows obtaining an image with high resolution (Arsenault et al. 1995).

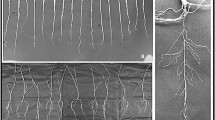
(a) Scanning system coupled to Scanner used in lab to acquire root images; (b) maize root types acquired (8 days old)
In addition, excellent optical, electrical and mechanical features are needed to provide a lighting uniformity over entire area thereby avoiding further positions, orientation and light adjustments. For optimizing root image acquisition and analysis, an optical resolution (dots per inch, DPI) at last of 4800 with 0.005 pixel size, fast speed, 16/48 bit per pixel is necessary. Moreover, scanners include a standard calibration (Régent Instruments Inc.) to normalize the data obtained from different model or root position (orientation, lighting, method of acquisition etc.).
On the other hand, the scanning system does not allow to obtain detailed information concerning root tips (e.g. cell organization of root apical meristem, root hair density etc.). Therefore, a camera connected to a stereomicroscope should be useful to have a higher resolution (Fig. 2.4).

(a) Camera connected to a stereomicroscopy; (b) microscopy
In both cases (scanner or camera) these hardware are connected to a work station. However, a computer configuration to image analysis software needs a powerful processor with a high RAM (over 2 GB), an operative system work at 32 or 64 bit and a large screen (at least 24″). The analysis can be carried out on root directly placed on scanning glass or adopting a root position system, which consists in a waterproof tray (Fig. 2.5). This system makes easy the root spatial disposition on the scanner surface improving the image quality.

Tomato roots grown in hydroponic system, disposed in water-proof tray, before (a) and after (b) toluidine staining
3 Image Acquisition
3.1 Root Collection and Stocking
Since there is a huge difference between roots collected from soil and those hydroponically grown, this should be considered during the experimental design. Hydroponic systems or plants cropped on sandy soil can greatly simplify this step, while plant collection from soils rich in clay and/or organic matter can make it extremely difficult and it could increase the loss of roots (especially thinner roots).
WinRhizo allows the automatic acquisition of root parameters. Roots grown in hydroponic systems can be directly acquired, conversely, those collected from soil system need to be accurately washed before image acquisition.
However, root system could be also stocked for a long time without any morphological changes, in a preserving solution, also known as FAA, containing ethanol (96%) (656.25 mL L−1): formaldehyde (37%) (50 mL L−1): glacial acetic acid (99.85%) (50 mL L−1). This stoking method could be useful in experimental setups, with a high number of samples or huge root apparatus. In fact, large roots need to be divided in smaller portions that will be analyzed separately.
3.2 Root Staining
During image acquisition process, roots are digitized through a scanner. To obtain a detailed image of roots, especially the finest ones, could be necessary to increase the contrast of tissue, through a previous staining. It improves both the accuracy of the analysis and the determination of root diameters. Roots are soaked for 5–10 min (depending on root diameter) in 0.1% Toluidine blue solution. After staining, roots have to be washed thoroughly in order to remove the excessive dye (Fig. 2.5). Care should be taken during long dye exposition since it could bring to the production of dye lumps around the root surface, invalidating the analysis.
3.3 Root Positioning and Image Acquisition
Once stained, roots can be directly placed on the water-proof trays filled with distilled water (Fig. 2.5b). Root positioning is helped using tweezers and very fine plastic sticks as tools. Roots should be completely immersed in distilled water, thereby avoiding the presence of shadows as well.
Furthermore, roots should be positioned randomly avoiding overlaps, especially when the analysis aimed to quantify crosses, forks and tips numbers. For roots with large dimensions, the positioning in the trays could be difficult or not possible. Therefore, as before indicated, roots have to be separated in smaller portions (Fig. 2.3b), or alternatively, a representative sample of whole root could be scanned, before determining dry mass. Then, the SRL (Specific Root Length) of sample can be used to estimate the total root length.
All root adjustments should be done on trays directly placed on scanner glass to avoid shifts during acquisition.
As previously introduced, WinRhizo is coupled to a calibrated scanner, which lights roots from above and below while being scanned further reducing shadows on root image. The first step in root acquisition consists in creating a preview of whole root that should be analyzed for improving the final acquisition quality of image in terms of brightness, contrast, exposition, etc. A pivotal parameter that should be considered during image acquisition is the final resolution, which depends on type of samples. A low resolution reduces excessively the image quality causing loss of precision in measurement. For example, Zea mays roots may be scanned at 200–400 dpi, while tomato roots should be scanned at 500–600 dpi.
Moreover, in order to reduce the file size, root acquisition could be done in gray-scale images. This option is suggested only for root length measurements and not for other parameters.
At the end of scanner acquisition, images are saved and stored in .tiff or .jpg format, allowing to acquire a huge number of samples and to carry out the analysis later.
4 Image Analysis
Image analysis starts immediately after root acquisition. One of the most important steps is the choice of the right threshold value (Fig. 2.6). During image analysis, the software uses thresholding to discriminate between root and image aberrations. Based on grayscale values, each pixel is classified as either root or artifact; that’s the reason why any shadows should be avoided. Although the software is provided by macros that automatically set the adequate parameters, it is advised to manually set them each time.

Parameter setting in WinRhizo software
Successively, root artifacts, debris or unattractive image regions should be excluded using the dedicated function. Then, the user selects the region/s of interest to run the analysis. Once started, the software collect all the desired parameters at once, then the results are displayed on the monitor and roots are skeletonized by different color traits, which represent the classes of the parameters selected by the user (e.g. diameter, area, volume etc.) (Fig. 2.7). At the end of the analysis the software directly save all the data as .txt file, which could be opened in standard spreadsheet statistic programs for further data meaning interpretation. In Table 2.1 is reported an example of data output.

The images reported are from the root image previously shown, but are a selection of a smaller region for clarity. Color traces indicate where roots have been detected. (a) Portion of root analyzed (green rectangle on root image) and divided in diameter classes (colored bars); (b) root skeletonized after WinRhizo analysis
References
Abenavoli MR, Leone M, Sunseri F, Bacchi M, Sorgonà A (2016) Root phenotyping for drought tolerance in bean landraces from Calabria (Italy). J Agric Crop Sci 202:1–12
Adu MO, Chatot A, Wiesel L, Bennett MJ, Broadley MR, White PJ, Dupuy LX (2014) A scanner system for high-resolution quantification of variation in root growth dynamics of Brassica rapa genotypes. J Exp Bot 65:2039–2048
Arsenault JL, Pouleur S, Messier C, Guay R (1995) WinRhizo, a root measuring system with a unique overlap correction method. Hortic Sci 30:906
Berntson GM (1994) Root systems and fractals: how reliable are calculations of fractal dimension? Ann Bot 73:281–284
Costa C, Dwyer LM, Dutilleul P, Foroutan-pour K, Liu A, Hamel C, Smith DL (2003) Morphology and fractal dimension of root systems of maize hybrids bearing the leafy trait. Can J Bot 81:706–713
Danjon F, Sinoquet H, Godin C, Colin F, Drexhage M (1999) Characterisation of structural tree root architecture using 3D digitising and AMAPmod software. Plant Soil 211:241–258
Di Iorio A, Lasserre B, Scippa GS, Chiatante D (2005) Root system architecture of Quercus pubescens trees growing on different sloping conditions. Ann Bot 95:351–361
Eghball B, Settimi JR, Maranville JW, Parkhurst AM (1993) Fractal analysis for morphological description of corn roots under nitrogen stress. Agron J 85:287–289
Eshel A (1998) On the fractal dimensions of a root system. Plant Cell Environ 21:247–251
Fang S, Yan X, Liao H (2009) 3D reconstruction and dynamic modeling of root architecture in situ and its application to crop phosphorus research. Plant J 60:1096–1108
Fitter AH (1991) The ecological significance of root system architecture: an economic approach. In: Atkinson D (ed) Plant root growth: an ecological perspective. Blackwell Scientific, Oxford, pp 229–243
Fitter AH (1996) Characteristics and functions of root system. In: Waisel Y, Eshel A, Kafkafi U (eds) Plant roots, the hidden half. Marcel Dekker, New York, pp 1–20
Fitter AH, Stickland TR (1992) Fractal characterization of root system architecture. Funct Ecol 6:632–635
Forde BG, Lorenzo H (2001) The nutritional control of root development. Plant Soil 232:51–68
Hagrey SA (2007) Geophysical imaging of root-zone, trunk, and moisture heterogeneity. J Exp Bot 58:839–854
Hargreaves C, Gregory P, Bengough A (2009) Measuring root traits in barley (Hordeum vulgare ssp. vulgare and ssp. spontaneum) seedlings using gel chambers, soil sacs and X-ray microtomography. Plant Soil 316:285–297
Hochholdinger F, Zimmermann R (2008) Conserved and diverse mechanisms in root development. Curr Opin Plant Biol 11:70–74
Hochholdinger F, Woll K, Sauer M, Dembinsky D (2004) Genetic dissection of root formation in maize (Zea mays L.) reveals root-type specific developmental programmes. Ann Bot 93:359–369
Hruska J, Cermak J, Sustek S (1999) Mapping of tree root systems by means of the ground penetrating radar. Tree Physiol 19:125–130
Iyer-Pascuzzi AS, Symonova O, Mileyko Y, Yueling H, Belcher H, Harer J, Weitz JS, Benfey PN (2010) Imaging and analysis platform for automatic phenotyping and trait ranking of plant root systems. Plant Physiol 152:1148–1157
Jahnke S, Menzel MI, Van Dusschoten D, Roeb GW, Buhler J, Minwuyelet S, Blumler P, Temperton VM, Hombach T, Streun M (2009) Combined MRI–PET dissects dynamic changes in plant structures and functions. Plant J 59:634–644
Le Marie C, Kirchgessner N, Marschall D, Walter A, Hund A (2014) Rhizoslides: paper-based growth system for non-destructive, high throughput phenotyping of root development by means of image analysis. Plant Methods 10:10–13
Loudet O, Gaudon V, Trubuil A, Daniel-Vedele F (2005) Quantitative trait loci controlling root growth and architecture in Arabidopsis thaliana confirmed by heterogeneous inbred family. Theor Appl Genet 110:742–753
Lynch JP (1995) Root architecture and plant productivity. Plant Physiol 109:7–13
Lynch JP, Nielsen KL (1996) Simulation of root system architecture. In: Waisel Y, Eshel A, Kafkafi U (eds) Plant roots, the hidden half. Marcel Dekker, New York, pp 247–257
Lynch JP, van Beem JJ (1993) Growth and architecture of seedling root of common bean genotypes. Crop Sci 33:1253–1257
Malamy JE (2009) Lateral root formation. In: Beeckman T (ed) Root development. Wiley Online Library, pp 83–126
Muday GK, Rahman A (2007) Auxin transport and the integration of gravitropic growth. In: Gilroy S, Masson P (eds) Plant tropisms. Blackwell Publishing, Oxford, pp 47–78
Newman EI, Andrews RE (1973) Uptake of phosphorus and potassium in relation to root growth and root density. Plant Soil 38:49–69
Nibau C, Gibbs D, Coates J (2008) Branching out in new directions: the control of root architecture by lateral root formation. New Phytol 179:595–614
Oppelt AL, Kurth W, Dzierzon H, Jentschke G, Godbold DL (2000) Structure and fractal dimensions of root systems of four co-occurring fruit tree species from Botswana. Ann For Sci 57:463–475
Osmont KS, Sibout R, Hardtke CS (2007) Hidden branches: developments in root system architecture. Annu Rev Plant Biol 58:93–113
Ryser P (1998) Intra- and interspecific variation in root length, root turn-over and the underlying parameters. In: Lambers H, Poorter H, MMI VV (eds) Inherent variation in plant growth. Physiological mechanism and ecological consequences. Backhuys, Leiden, pp 441–465
Ryser P, Lambers H (1995) Root and leaf attributes accounting for the performance of fast- and slow-growing grasses at different nutrient supply. Plant Soil 170:251–265
Sorgonà A, Cacco G (2002) Linking the physiological parameters of nitrate uptake with root morphology and topology in wheat (Triticum durum Desf.) and in citrus rootstock (Citrus volkameriana Ten & Pasq). Can J Bot 80:494–503
Sorgonà A, Abenavoli MR, Cacco G (2005) A comparative study between two citrus rootstocks: effect of nitrate on the root morpho-topology and net nitrate uptake. Plant Soil 270:257–267
Sorgonà A, Abenavoli MR, Gringeri PG, Cacco G (2007a) Comparing morphological plasticity of root orders in slow- and fast-growing citrus rootstocks supplied with different nitrate levels. Ann Bot 100:1287–1296
Sorgonà A, Abenavoli MR, Gringeri PG, Lupini A, Cacco G (2007b) Root architecture plasticity of citrus rootstocks in response to nitrate availability. J Plant Nutr 30:1921–1932
Tatsumi J (2001) Fractal geometry of root system morphology: fractal dimension and multifractals. In: Proceedings 6th symposium international society root research, Nagoya, Japan, pp 24–25
Tracy SR, Roberts JA, Black CR, McNeill A, Davidson R, Mooney SJ (2010) The X-factor: visualizing undisturbed root architecture in soils using X-ray computed tomography. J Exp Bot 61:311–313
Wahl S, Ryser P (2000) Root tissue structure is linked to ecological strategies of grasses. New Phytol 148:459–471
Walch-Liu P, Ivanov II, Filleur S, Gan Y, Remans T, Forde BG (2006) Nitrogen regulation of root branching. Ann Bot 97:875–881
Walk TC, Van Erp E, Lynch JP (2004) Modelling applicability of fractal analysis to efficiency of soil exploration by roots. Ann Bot 94:119–128
Wang H, Siopongco J, Wade LJ, Yamauchi A (2009) Fractal analysis on root systems of rice plants in response to drought stress. Environ Exp Bot 65:338–344
Zhou XC, Luo XW (2009) Advances in non-destructive measurement and 3D visualization methods for plant root based on machine vision. In: Proceedings of the 2nd international conference on biomedical engineering and informatics. Tianjin, BMEI’09, pp 1–5
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Lupini, A. et al. (2018). Root Morphology. In: Sánchez-Moreiras, A., Reigosa, M. (eds) Advances in Plant Ecophysiology Techniques. Springer, Cham. https://doi.org/10.1007/978-3-319-93233-0_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-93233-0_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-93232-3
Online ISBN: 978-3-319-93233-0
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)