
Abstract
In this paper, fuzzy sets are established for different states of a reinforced concrete bridge based on finite element model of the bridge. This bridge has been monitored continuously using vibrational signals obtained from accelerometer and strain gauge sensors installed on girders of the bridge. A Finite element model of the bridge is calibrated based on real data gathered from the bridge to be a close representation of the real structure. The calibrated finite element models of the bridge are then constructed for healthy, medium damaged and severe damaged states of the bridge. Using fuzzy set principles, the healthy, medium and severe damage states of the bridge are constructed with fuzzy bell functions. Fuzzy pattern recognition using similarity between fuzzy sets is then utilized to identify any unknown states of the bridge that can give authorities an unbiased tool for efficient maintenance of the bridge.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Structural health monitoring (SHM) is an ongoing field of research mainly focus on detecting and locating damage in structures. The main goal of SHM systems is to increase the safety and reliability of infrastructure with minimum human intervention and more efficiency. Since defining damage is a challenging task, researchers agreed that damage cannot be measured but its influence on the structure’s response might be sensed/observed [1]. Based on Farrar et al. [2] damage is defined as “Intentional or unintentional changes to the boundary conditions and system connectivity, which adversely affect the current or future performance of that system.” Other definitions of damage such as decrease in stiffness, crack growth and strain thresholds exist in the SHM literature [3,4,5].
Much effort has been done to probe damage in a structure, before it reaches a critical state. Damage reduces the structure stiffness and hence affects the performance of the structure. Identifying a proper feature that can be observed to realize changes that occur in the structural response due to presence of damage has been the focus of most research efforts. Most current damage features rely on dynamic characteristics of the structure such as natural frequency, modes shapes, etc., because vibration characteristics demonstrate the degradation in stiffness and are relatively easy to measure in the time domain [6]. Using vibration signals, it has been shown that some damage features can be identified in the frequency domain or the wavelet domain [7, 8]. The size and complexity of civil infrastructure play a major role in developing efficient SHM systems. For some structures, the measurements of interest might not be limited to strain and vibration measurements. For instance, in cable-stayed bridges, measuring force and the condition of strands are a major focus in monitoring the health of the cables. In pipeline structures, corrosion of pipelines is of major interest for its health monitoring [9].
Bridges are among the most important infrastructure of any nation and they play a key role in transportation system. One of the major responsibilities of Departments of Transportation and the Federal Highway Administration is to maintain high standards in safety and reliability of bridges. Based on a recent report of ASCE bridges received a grade of C+ and it mentioned that one in nine of the nation’s bridges are rated as structurally deficient which necessitates $20.5 billion investment annually. This cost covers not only the shoring up of bridges, but also includes keeping a watchful eye on bridges with degrading performance, thereby helping the U.S. Departments of Transportation (DOTs) to make efficient decisions on future maintenance, repair or full replacement of the nation’s bridge infrastructure. This will open great opportunities to implement SHM systems on civil infrastructure for researchers. It became obvious to the public that if a simple monitoring system was installed on the I-35 Bridge in Minneapolis, the significance of the disaster of the total failure of this bridge would have been lessened or prevented. After this tragedy, researchers utilized more SHM systems on bridges [10,11,12,13,14,15]. On the other hand, SHM systems can be incorporated in a great number of civil infrastructure under construction. Deploying efficient monitoring systems on bridges can provide early warning about potential damage. Moreover, continuous monitoring of bridges and critical infrastructure may enable us to move from the current schedule-based maintenance to condition-based maintenance. This should save millions of dollars and allow for the focusing of resources. Furthermore, using new advances in sensing technology and wireless systems made the remote monitoring of bridges a reality.
In this paper, a monitoring system consisting of accelerometers and strain gauges was designed and installed on a reinforced concrete (RC) bridge. Then a finite element (FE) model of the bridge was developed and calibrated based on the real vibration data from the monitoring system. Fuzzy sets are established using the real data and data from the FE model of the bridge for healthy and damaged states of the bridge. These fuzzy sets are then used to identify the current state of the bridge based on the principles of fuzzy pattern recognition. Proper identification of the current state of the bridge will help authorities to make effective decision in maintenance planning and/or replacing the existing bridge.
2 Bridge Description and the Designed SHM System
An RC bridge on Interstate 40 in New Mexico was selected for installation of the monitoring system. This three span bridge consists of five RC K-frame girders with a total length of about 200 feet. Figures 1 and 2 shows the RC bridge which is located in the City of Tucumcari in NM.

Bridge 7937 in Tucumcari NM.

K-frames of Bridge 7937.
The monitoring system that was used for this bridge consists of twenty PCB 333B50 accelerometers (5 installed on each girder) and Vishay electromechanical strain gauges. Accelerometer sensors were used to acquire vibrational data from the bridge. These sensors are connected to a Compact Rio data acquisition device that consists of two important parts: (1) a real-time controller that has volatile memory and nonvolatile memory for data storage. The real-time controller also encompasses an Ethernet port with built-in file servers allowing access by HTTP and FTP, and (2) a multi-slot reconfigurable chassis that contains FPGAs and a Peripheral Component Interface (PCI) bus interface that connects between the FPGA and the real-time controller. This built-in data transfer protocol is used to communicate data to the controller where post processing, data logging and communication to a host computer can take place. The FPGA chip connects directly to the analogue input modules using FPGA functions. Different types of sensors can be connected to different types of analogue modules. Figure 3 shows the Compact Rio data acquisition device with the modules connected to the chassis.

Compact Rio data acquisition device.
Before installing the SHM system on the RC bridge, all the sensors, FPGA modules and data acquisition device were tested and no error were found in the monitoring system (Fig. 4). The following figures show the installed monitoring system on the bridge:

Steel box used for the data acquisition device housing.
3 Finite Element Model of the Bridge and Fuzzy Damage Classification
A three dimensional finite element (FE) model of the bridge was developed using SAP2000 software. The FE model was calibrated using the real signals received from accelerometer and strain gauge sensors on the bridge. This model simulates the variable cross sections of girders along with the RC slab on top of them and presents the behavior of the bridge under traffic loadings. Since the bridge is in a healthy state, we used the calibrated 3D FE model to introduce different damage states to the bridge (Fig. 5). The damage states were developed by decreasing the flexural stiffness (EI) of different elements. Figure 6 illustrates the 3D FE model of the bridge.

Accelerometer sensors installed on the bridge.

3D FE model of the bridge.
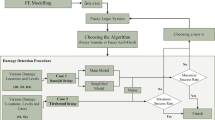
Once the FE model of the bridge was established, damage features, which were the energy of acceleration signals in wavelet domain, were extracted at each node of the FE model. Here, we utilized fuzzy set theory in order to represent damage features. Different damage states in structures are defined by different fuzzy sets that are established by principles of inductive reasoning. The vagueness and uncertainties associated with the damage definition and the significant overlap between different damage states in structures make damage-state description amenable to fuzzy definitions and fuzzy pattern recognition. Inductive reasoning or inductive inference is the process of extracting general rules from limited and specific sets of information [16]. Inductive reasoning is considered a cognitive activity that integrates probabilistic and non-probabilistic uncertainty for approximate reasoning of observations. The damage definition process is always based on limited and uncertain information. Damage detection and damage pattern recognition is therefore a proper field for utilizing principles of inductive reasoning [17]. Our method aims at classifying damage states in the structure by establishing fuzzy sets. Since different damage states in the structure have significant overlap and vague boundaries, fuzzy sets are used to describe these damage states. Using fuzzy set theory, the two kinds of uncertainties (i.e. aleatoric and epistemic) associated with defining damage states in structures are considered.
The use of inductive reasoning for classification is based on the fact that the process of induction is associated with minimum uncertainty. Shannon [18] introduced entropy as a measure of disorder in classifying data in 1948 to describe uncertainty or to quantify the information content in a dataset. The uncertainty associated with the value of a discrete random variable (\( \xi \)) can be measured by the entropy (S) as
where p(\( \xi \)) is the probability of the occurrence of \( \xi \). In order to minimize uncertainty, the entropy S(\( \xi \)) should be minimized. The minimized entropy S(\( \xi \)) will partition the domain into two classes [19, 20]. This entropy can be used as a reasoning basis to obtain generalized classes for a specific set of limited observations. Fuzzy categories are formulated based on the premise of an argument regardless of the fact that such categories are not certain [21].
In order to establish fuzzy sets to describe damage states of the structure, the threshold values defining the boundaries of these fuzzy sets need to be identified. First, two fuzzy sets can be established as a two class partitioning problem, then other fuzzy sets describing other damage states of the structure can be established by generating subclasses for each individual class. Based on inductive reasoning principles the first threshold partitions a domain into two classes. This point (x 0) that minimizes entropy in the interval [x 1 , x 2 ] can be used to partition this domain. The entropy of point (x 0) on the damage feature domain (x) can divide the interval [x 1 , x 2 ] into two intervals [x 1 , x 0] and [x 0 , x 2 ]. The entropy S can be calculated as
where \( p_{j}^{i} \left( x \right) \) is a conditional probability that the class j sample is in the region [x i , x i + x] and [x i + x, x i+1 ] and p i (x) are probabilities that all samples are in the region [x i , x i + x] and [x i + x, x i+1 ]. The values \( p_{j}^{i} \left( x \right) \) and p i (x) are calculated as
where \( n_{j}^{i} \left( x \right) \) is the number of class j samples located in the ith interval [x i , x i + x], n i (x) is the total number of samples located in the ith interval and n is the total number of samples in the interval [x i , x i+1 ].
By choosing the type of membership function (MF) (triangular, bell shape and etc.), fuzzy sets are established in the damage feature domain. To consider the fuzziness in the damage detection process, some degree of overlapping between two adjacent fuzzy sets needs to be achieved. To establish secondary fuzzy sets accounting for other damage states of the structure, the secondary threshold values are obtained based on the primary threshold value. In other words, the damage feature with the highest membership value in an intermediate fuzzy set corresponds to the minimum membership value in the two neighbouring fuzzy sets. That enables a significant overlap between the damage fuzzy sets which directly correlates to the level of fuzziness (uncertainty) in the damage states [22].
For Tucumcari Bridge, one primary threshold value and two secondary threshold values were identified to establish three fuzzy sets describing three damage states in the bridge: healthy, medium damage and severe damage. It is important to note the importance of correlating that fuzzy level of damage to mechanical damage in the structure. A few methods have been recently proposed for establishing such correlation [23, 24].
The process of classifying an unknown fuzzy set based on known fuzzy sets is called fuzzy pattern recognition. As the fuzzy damage sets are established as explained above, using fuzzy pattern recognition, datasets of damage feature can be classified to one of the damage classes already defined by fuzzy sets on the damage feature domain. Such classification can be developed using the degree of similarity approach. The degree of damage similarity (DM) between two fuzzy damage vectors \( \mathop {D^{i} }\limits_{\sim } \) and \( \mathop {D^{j} }\limits_{\sim } \) is defined as
Where \( (\mathop {D^{i} }\limits_{\sim } \circ \mathop {D^{j} }\limits_{\sim } ) \) is the inner product of the two fuzzy vectors \( \mathop {D^{i} }\limits_{\sim } \), \( \mathop {D^{j} }\limits_{\sim } \) and \( (\overline{{\mathop {D^{i} }\limits_{\sim } \oplus \mathop {D^{j} }\limits_{\sim } }} ) \) is the complement of the outer product of the two vectors. When the value of DM approaches 1, the two fuzzy vectors are similar and when DM approaches 0, the two fuzzy vectors are dissimilar.
Assuming the current state of the bridge 7937 as healthy, all of the acceleration data obtained from the bridge using installed sensors can be used to calculate the energy of the signals in wavelet domain as a damage feature for healthy state. Since high correlation was observed between signals obtained from the calibrated FE model and the signals from accelerometers on the bridge, the FE model can be used to generate acceleration signals for different damaged states of the bridge. The damage is defined on the FE model as reductions in stiffness of the frame elements in the locations that are more prone to be cracked. For this reason three elements located on the joint of the K-frame on Girder 3 of the FE model are selected as damaged elements. These elements are located at the location of maximum negative moment. By reducing the flexural stiffness in these three elements by 10% to 50% in the FE model, the damage feature is calculated from the nodes of the FE model. Using the principles of inductive reasoning and a bell function for establishing fuzzy membership functions, three fuzzy damage states in the structure: healthy (\( \mathop H\limits_{\sim } \)), medium damage (\( \mathop {MD}\limits_{\sim } \)) and severe damage (\( \mathop {SD}\limits_{\sim } \)) were developed as shown in Fig. 7.

Healthy, medium damage and severely damage states fuzzy sets for the bridge.
4 Results and Discussions
After establishing fuzzy sets representing different states of the bridge, an unknown data set from the real signals from the bridge was obtained. Figure 8 shows the unknown data set \( \mathop A\limits_{\sim } \) in comparison with the known states of healthy, medium damage and severely damage states of the bridge.

An unknown data set \( \mathop A\limits_{\sim } \) in comparison to the known states of the bridge.
Using the similarity degree (DM) described by Eq. (6), the similarity between the unknown dataset and the established fuzzy damage states of the RC bridge can be calculated by the means of fuzzy pattern recognition. Based on this equation, the known fuzzy set \( \mathop A\limits_{\sim } \) has 95% degree of similarity with the healthy state and 33% degree of similarity with the medium damage and no degree of similarity with severe damage state. These results confirm that the accelerometer data were obtained from the healthy state of the bridge. Using fuzzy pattern recognition and comparing data with the known established states of the bridge will give authorities a good feedback about the current state of the bridge. This feedback would certainly inform the decision making for efficient maintenance of the bridge.
5 Conclusions
In this paper, a fuzzy pattern recognition method was introduced and utilized on a real bridge to identify the current and future states of the bridge with respect to the known healthy, medium and severe damage states of the bridge. The RC bridge already had an installed monitoring system consisting of accelerometers and strain gauge sensors connected to an FPGA data acquisition device. The 3D FE model of the bridge was developed and calibrated using real data from the bridge. The calibrated FE model was used to provide the data for the medium and severe damage states of the bridge. Using these data along with the principles of inductive reasoning, a group of fuzzy sets for healthy, medium damage and severe damage states of the bridge were established. An unknown state of the bridge created using the acceleration data from the bridge was used to confirm the efficiency of the method in identifying the current state of the bridge. It was shown that the unknown state of the bridge has 95% similarity to the healthy state, using the degree of similarities between fuzzy sets. The fuzzy pattern recognition would be an effective tool for authorities to make better decisions on the safety and maintenance needs of the bridge.
References
Lemaitre, J., Desmorat, R.: Engineering Damage Mechanics: Ductile, Creep, Fatigue and Brittle Failures. Springer, New York (2002)
Farrar, C.R., Lieven, N.A.J., Bement, M.T.: An Introduction to Damage Prognosis. In: Inman, D.J., Farrar, C.R., Lopes, V., Steffen, V. (eds.) Damage Prognosis for Aerospace, civil and Mechanical System. Wiley, West Sussex, England (2005)
Broek, D.: Elementary Engineering Fracture Mechanics. Martinus Nijhoff Publishers, Dordrecht (1986)
Worden, K., Dulieu-Barton, J.M.: An overview of intelligent fault detection in systems and structures. Struct. Health Monit. 3(1), 85–98 (2004)
Lemaitre, J., Desmorat, R.: Engineering Damage Mechanics: Ductile, Fatigue and Brittle Failures. Springer, New York (2002)
Neild, S.A., McFadden, P.D., Williams, M.S.: A review of time-frequency methods for structural vibration analysis. Eng. Struct. 25, 713–728 (2003)
Chang, C.-C., Chen, L.-W.: Damage detection of cracked thick rotating blades by a spatial wavelet based approach. Appl. Acoust. 65, 1095–1111 (2004)
Reda Taha, M., Noureldin, A., Osman, A., El-Sheimy, N.: Introduction to the use of wavelet multi-resolution analysis for intelligent structural health monitoring. Can. J. Civ. Eng. 31(5), 719–731 (2004)
Thein, A.: Pipeline structural health monitoring using macro-fiber composite active sensors. Master Thesis, Department of Mechanical, Industrial, and Nuclear Engineering, University of Cincinnati (2006)
Hu, X., Wang, B., Ji, H.: A wireless sensor network-based structural health monitoring system for highway bridges. Comput. Civ. Infrastruct. Eng. 28(3), 193–209 (2013)
Catbas, F.N., Susoy, M., Frangopol, D.M.: Structural health monitoring and reliability estimation: long span truss bridge application with environmental monitoring data. Eng. Struct. 30(9), 2347–2359 (2008)
Yang, C., Wu, Z., Zhang, Y.: Structural health monitoring of an existing PC box girder bridge with distributed HCFRP sensors in a destructive test. Smart Mater. Struct. 17(3), 035032 (2008)
Torres, B., Payá-Zaforteza, I., Calderón, P.A., Adam, J.M.: Analysis of the strain transfer in a new FBG sensor for structural health monitoring. Eng. Struct. 33(2), 539–548 (2011)
Bao, Y., Beck, J.L., Li, H.: Compressive sampling for accelerometer signals in structural health monitoring. Struct. Health Monit. 10, 235–246 (2010)
Ooijevaar, T.H., Loendersloot, R., Warnet, L.L., De Boer, A., Akkerman, R.: Vibration based structural health monitoring of a composite T-beam. Compos. Struct. 92(9), 2007–2015 (2010)
Feeney, A., Heit, E.: Inductive Reasoning: Experimental, Developmental and Computational Approach. Cambridge University Press, UK (2007)
Tenenbaum, J.B., Griffiths, T.L., Kemp, C.: Theory-based Bayesian models of inductive learning and reasoning. Trends Cogn. Sci. 10(7), 309–318 (2006)
Shannon, C.E.: A mathematical theory of communication. Bell Syst. Tech. J. 27, 379–423 (1948)
Kim, C.J., Russell, B.D.: A learning method for use in intelligent computer relays for high impedance faults. IEEE Trans. Power Delivery 6(1), 109–115 (1991)
Ross, T.J.: Fuzzy Logic with Engineering Applications. Wiley, West Sussex (2004)
Applebaum, D.: Probability and Information: An Integrated Approach. Cambridge University Press, NY (2003)
Klir, G.J., Yuan, B.: Fuzzy Sets and Fuzzy Logic, Theory and Application. Prentice Hall, Upper Saddle River (1995)
Zhang, J., Sato, T., Iai, S., Hutchinson, T.: A pattern recognition technique for structural identification using observed vibration signals: nonlinear case studies. Eng. Struct. 30(5), 1417–1423 (2008)
Sheyka, M.: Analytical and Experimental Investigations of Photonic Crystals for Sub-Micron Damage Detection. M.Sc. Thesis, Department of Civil Engineering, University of New Mexico, NM, USA (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Azarbayejani, M. (2018). Fuzzy Pattern Recognition in Vibration-Based Structural Health Monitoring. In: Conte, J., Astroza, R., Benzoni, G., Feltrin, G., Loh, K., Moaveni, B. (eds) Experimental Vibration Analysis for Civil Structures. EVACES 2017. Lecture Notes in Civil Engineering , vol 5. Springer, Cham. https://doi.org/10.1007/978-3-319-67443-8_24
Download citation
DOI: https://doi.org/10.1007/978-3-319-67443-8_24
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-67442-1
Online ISBN: 978-3-319-67443-8
eBook Packages: EngineeringEngineering (R0)