
Abstract
In this paper we extend the results contained in Antonietti et al. (J Sci Comput 68(1):143-170, 2016) and consider the problem of approximating the elastodynamics equation by means of hp-version discontinuous Galerkin methods. For the resulting semi-discretized schemes we derive stability bounds as well as hp error estimates in the energy and L 2-norms. Our theoretical estimates are verified through three dimensional numerical experiments.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


1 Introduction
The present paper deals with the numerical modeling through the (linear) elastodynamics equation of seismic wave propagation phenomena in complex, three-dimensional media. Currently, the numerical methods mostly employed to tackle seismic wave propagation include finite differences, pseudo-spectral, spectral element, and high–order/spectral element discontinuous (DG) Galerkin techniques. In particular Spectral Element methods, firstly introduced for fluid dynamics problems in the seminal paper [28], have become one of the most effective and powerful approaches for solving three-dimensional seismic wave propagation problems in strongly heterogeneous media thanks to their geometrical flexibility and high order accuracy, which made them well suited to correctly approximate the wave field. We refer to [14, 20, 22, 25, 35] for the first development of Spectral Element methods for the elastodynamics equation, and, for example, to [21, 23, 36, 39] for its application in computational seismology. In recent years, displacement-based high–order/spectral element discontinuous Galerkin methods have also been developed for linear and nonlinear (visco) elastic wave propagation problems, mainly because the discretization parameters, i.e. the mesh-size and/or the polynomial approximation degree, can be naturally tailored to the region of interests; see e.g. [3–6, 12, 24, 26, 31–33]. Additionally, high–order/spectral element DG methods feature very low dispersion and dissipation errors. A dispersion/dissipation analysis based on the approach of [1] for DG approximations of elastic wave propagation problems has been carried out in [3, 11] and [4], respectively, on two-dimensional quadrilateral/triangular meshes: the extension to three-dimensions has been addressed recently in [15]. Another interesting feature is their being embarrassingly parallel and therefore naturally oriented towards high performance parallel computing. DG methods are thus very well suited to deal with i) the intrinsic multi-scale nature of seismic wave propagation problems, involving a relative broad range of wavelengths; ii) the complexity of the geometrical constraints. The aim of this paper is to extend to the hp-version the theoretical analysis developed in [5] as well as to prove approximation bounds in the L 2 norm. For the sake of brevity, here we focus only on displacement DG formulation, but the present analysis can be extended also to displacement-stress formulations. We show that, also in the hp-version setting, stability and approximation properties hold without the need to introduce an extra term that penalizes the time derivative of the displacement besides the displacement itself, as considered in previous works [31–33]. Our semidiscrete analysis represents an intermediate but essential step towards the analysis of stability of the fully discrete scheme resulting after time integration.
The remaining part of manuscript is organized as follows. In Sect. 2 we introduce the model problem and its hp-version discontinuous Galerkin approximation. The stability analysis is presented in Sect. 3, whereas in Sect. 4 we present the hp−version a priori error estimates in both the energy and L 2 norms. Three-dimensional numerical experiments verifying the theory are presented in Sect. 5.
2 Problem Statement and its hp-Version Discontinuous Galerkin Approximation
Let Ω ⊂ R d, d = 2, 3, be an open, bounded convex region with Lipschitz boundary ∂Ω. Throughout the paper, [H m(Ω)]d and [H m(Ω)]sym d×d denote the standard Sobolev spaces of vector–valued and symmetric tensor-valued functions defined over Ω, respectively, and (⋅ , ⋅ ) Ω denote the standard inner product in any of the spaces [L 2(Ω)]d or [L 2(Ω)]sym d×d. For given T > 0 and f = f(x, t) ∈ L 2((0, T]; [L 2(Ω)]d), we consider the problem of approximating the variational formulation of the linear elastodynamics equation with homogeneous Dirichlet boundary conditions: for all t ∈ (0, T] find u = u(t) ∈ V ≡ [H 0 1(Ω)]d such that:
subjected to the (regular enough) initial conditions u 0 and u 1. Here, \(\mathbf{u}:\varOmega \times [0,T]\longrightarrow \mathbb{R}^{d}\) is the displacement vector field and \(\boldsymbol{\varepsilon }(\mathbf{u}):\varOmega \longrightarrow \mathbb{R}_{\mathrm{sym}}^{d\times d}\) is the symmetric gradient. Moreover, ρ is the mass density, which is supposed to be a strictly positive and uniformly bounded function, and \(\mathcal{D} = \mathcal{D}(x): \mathbb{R}_{\mathrm{sym}}^{d\times d}\longrightarrow \mathbb{R}_{\mathrm{sym}}^{d\times d}\) is the inverse of the compliance tensor defined as \(\mathcal{D}\boldsymbol{\tau } = 2\mu \boldsymbol{\tau } +\lambda \mathrm{ tr}(\boldsymbol{\tau })\mathbb{I}\quad \forall \,\boldsymbol{\tau } \in \mathbb{R}_{\mathrm{sym}}^{d\times d}\). \(\mathbb{I} \in \mathbb{R}^{d\times d}\) and tr(⋅ ) are the identity and trace operators, respectively, and λ, μ ∈ L ∞(Ω), λ, μ > 0, being the Lamé parameters.
Henceforth, C denotes a generic positive constant independent of the discretization parameters, but that can depend on the physical quantities ρ, \(\mathcal{D}\) as well as on the final observation time T. Moreover, \(x\lesssim y\) and \(x\gtrsim y\) will signify x ≤ Cy and x ≥ Cy, respectively, with C as before.
2.1 Mesh, Trace Operators, and Discrete Spaces
We consider a sequence \(\left \{\mathcal{T}_{h}\right \}_{h}\) of shape-regular (not-necessarily matching) partitions of Ω into disjoint open elements K such that \(\overline{\varOmega } = \cup _{K\in \mathcal{T}_{h}}\overline{K}\), where each \(K \in \mathcal{T}_{h}\) is the affine image of a fixed master element \(\widehat{K}\), i.e., \(K = F_{K}(\widehat{K})\), \(\widehat{K}\) being either the open unit d-simplex or the open unit hypercube in \(\mathbb{R}^{d}\), d = 2, 3. An interior face (for d = 2, “face” means “edge”) of \(\mathcal{T}_{h}\) is defined as the (non–empty) interior of \(\partial \overline{K}^{+} \cap \partial \overline{K}^{-}\), where K ± are two adjacent elements of \(\mathcal{T}_{h}\). Similarly, a boundary face of \(\mathcal{T}_{h}\) is defined as the (non-empty) interior of \(\partial \overline{K} \cap \overline{\varOmega }\), where K is a boundary element of \(\mathcal{T}_{h}\). We collect the interior and boundary faces in the sets \(\mathcal{F}_{h}^{I}\) and \(\mathcal{F}_{h}^{B}\), respectively, and define \(\mathcal{F}_{h} = \mathcal{F}_{h}^{I} \cup \mathcal{F}_{h}^{B}\). We also assume the following mesh-regularity: i) for any \(K \in \mathcal{T}_{h}\) and for all \(F \in \mathcal{F}_{h}\), F ⊂ ∂K, \(h_{K}\lesssim h_{F}\); ii) for any pair of elements \(K^{\pm }\in \mathcal{T}_{h}\) sharing a (d − 1)–dimensional face \(h_{K^{-}}\lesssim h_{K^{+}}\lesssim h_{K^{-}}\): cf. [16, 29] for example.
Next, we introduce suitable trace operators, cf. [8]. Let F be an interior face shared by two elements K ± of \(\mathcal{T}_{h}\), and let n ± denote the normal unit vectors on F pointing outward K ±, respectively. For (regular enough) vector-valued and symmetric tensor-valued functions v and \(\boldsymbol{\tau }\), respectively, we define the weighted average and jump operators as
where v ± and \(\boldsymbol{\tau }^{\pm }\) denote the traces of v and \(\boldsymbol{\tau }\) on F taken within the interior of K ±, respectively, and where v ⊙ n = (vn T + nv T)∕2. Notice that [[v]] is a symmetric tensor-valued function. On a boundary face \(F \in \mathcal{F}_{h}^{B}\), we set analogously
When δ = 1∕2, we drop the subindex and simply write {⋅ }.
Finally, to any element \(K \in \mathcal{T}_{h}\) we assign a polynomial approximation degree p K ≥ 1, and define the hp-discontinuous finite element space
where \(\mathbb{M}^{p_{K}}(\widehat{K})\) is either the space \(\mathbb{P}^{p_{K}}(\widehat{K})\) of polynomials of degree at most p K on \(\widehat{K}\), if \(\widehat{K}\) is the reference d-simplex, or the space \(\mathbb{Q}^{p_{K}}(\widehat{K})\) of tensor–product polynomials on \(\widehat{K}\) of degree p K in each coordinate direction, if \(\widehat{K}\) is the unit reference hypercube in \(\mathbb{R}^{d}\). In the following we also assume that the following local bounded variation holds: \(p_{K^{-}}\lesssim p_{K^{+}}\lesssim p_{K^{-}}\) for any pair of elements \(K^{\pm }\in \mathcal{T}_{h}\) sharing a (d − 1)–dimensional face, cf. [29] for example.
Given a face \(F \in \mathcal{F}_{h}\) of an element \(K \in \mathcal{T}_{h}\), i.e., F ⊂ ∂K the following inverse inequality holds:
cf. [34]. Finally, we recall the following interpolation estimates, cf. [9].
Lemma 1
For any real number s K ≥ 0 and for any function \(\mathbf{v} \in [H^{s_{K}}(K)]^{d}\) , \(K \in \mathcal{T}_{h}\) , there exists Π h v ∈ V hp such that
where \(\xi \in \mathbb{N}_{0}^{d}\) is a multi-index of length \(\left \vert \xi \right \vert\) . Here, the second inequality holds provided s K > 1∕2 and k is the largest non-negative integer strictly less than s − 1∕2.
2.2 Semi-Discrete and Fully-Discrete Formulations
We are now ready to state the semi-discrete weak formulation: For any time t ∈ (0, T], find u h = u h(t) ∈ V hp such that
subjected to the initial conditions u 0 h and u 1 h, being u 0 h, u 1 h ∈ V hp suitable approximations in V hp of the initial data u 0, u 1, respectively. The bilinear form \(\mathcal{A}(\cdot,\cdot ):\) \(\mathbf{V}_{hp} \times \mathbf{V}_{hp}\longrightarrow \mathbb{R}\) in (16) is given by
where we have used the shorthand notation \((\mathbf{w},\mathbf{v})_{\mathcal{T}_{h}} =\sum _{K\in \mathcal{T}_{h}}(\mathbf{w},\mathbf{v})_{K}\) and \((\mathbf{w},\mathbf{v})_{\mathcal{F}_{h}} =\sum _{F\in \mathcal{F}_{h}}(\mathbf{w},\mathbf{v})_{F}\). The above method corresponds to the family of Interior Penalty (IP) methods: for δ = 1∕2, we get the Symmetric Interior Penalty (SIP) method [7, 41], whereas for δ ≠ 1∕2 we obtain the weighted SIP method of Stenberg, [38]. In (6) the stabilization function \(\sigma \in L^{\infty }(\mathcal{F}_{h})\) is defined facewise as
By defining \([H^{s}(\mathcal{T}_{h})]^{d}\) as the space of elementwise [H s(K)]d functions, s ≥ 0, and endowing the V hp and \(\mathbf{V}_{hp} + [H^{2}(\mathcal{T}_{h})]^{d}\) spaces with the (mesh-dependent) norms
respectively, with \(\|\mathbf{w}\|_{L^{2}(\mathcal{T}_{h})} = \sqrt{(\mathbf{v}, \mathbf{v} )_{\mathcal{T} _{h }}}\) and \(\|\mathbf{w}\|_{L^{2}(\mathcal{F}_{h})} = \sqrt{(\mathbf{v}, \mathbf{v} )_{\mathcal{F} _{h }}}\), with standard arguments it is easy to prove the following result.
Lemma 2
The bilinear form \(\mathcal{A}(\cdot,\cdot ): \mathbf{V}_{hp} \times \mathbf{V}_{hp}\longrightarrow \mathbb{R}\) defined as in (6) satisfies
where the second estimates holds provided that the penalty parameter α is chosen large enough, cf. (7). Moreover,
We remark that a sharp estimate on the minimum value α so that the second estimate in (9) holds can be obtained based on employing the results of [2].
The semi-discrete algebraic formulation of problem (16) reads as
supplemented with initial conditions U(0) = U 0 and \(\dot{\mathbf{U}}(0) = \mathbf{V}^{0}\). The vector U = U(t) contains, for any time t, the expansion coefficients of u h (t) ∈ V hp in a chosen basis. Analogously, M and A are the matrix representations of the mass and stiffness bilinear forms, respectively. By fixing a time-step Δt > 0 and denoting by U i ≈ U(t i ) the approximation of U at time t i = iΔt, we discretize (10) by the leap-frog method
with \(\mathbf{M}\mathbf{U}^{1} = (\mathbf{M} -\frac{\varDelta t^{2}} {2} \mathbf{A})\mathbf{U}^{0} +\varDelta t\mathbf{M}\mathbf{V}^{0} + \frac{\varDelta t^{2}} {2} \mathbf{F}^{0}\).
3 Stability of the Semi-Discrete Formulation
We now prove stability in the following natural energy norm induced by the DG methods described in the previous section:
First, we recall the following classical result, cf. [30, pag. 28].
Lemma 3
Let ξ ∈ L 2(0, T) a positive function and η ∈ C 0(0, T) a non-negative function such that
with C a non-negative constant. Then,
For the forthcoming analysis we will assume that the (possible) discontinuities of the piecewise constant stiffness tensor \(\mathcal{D}\) are aligned with the mesh partition \(\mathcal{T}_{h}\).
Proposition 1
Let u h ∈ C 2((0, T]; V hp ) be the approximate solution obtained with the SIP(δ) method (16), for a sufficiently large penalty parameter α, cf. (7). Then,
Proof
We take v = u t h ∈ V hp in (16) to obtain
Integrating in time between 0 and t leads to
We first observe that, for any \(F \in \mathcal{F}_{h}\), and any w, v ∈ V hp , the Cauchy-Schwarz inequality gives
where in the second step we have employed the definition (7) of the penalty function σ, the local bounded variation property of the discretization parameters, together with the trace-inverse inequality (2.1). From the Young inequality, we obtain
provided that the penalty parameter α is chosen sufficiently large. This leads to
Next, we observe that, from the Cauchy-Schwarz inequality we have
which leads to
The theorem follows by Lemma 3.
4 Error Analysis of the Semi-Discrete Formulation
Before stating the main result of this section, we recall some preliminary results that will be needed for the forthcoming analysis.
Lemma 4
For any \(\mathbf{v} \in [H^{s_{K}}(K)]^{d}\) , s K ≥ 0, \(K \in \mathcal{T}_{h}\) , there exists Π hp v ∈ V hp s.t.
Moreover, if \(\mathbf{v},\mathbf{v}_{t} \in [H^{s_{K}}(K)]^{d}\) , for any \(K \in \mathcal{T}_{h}\) , then
Proof
We only show (15), as (14) is a particular case. Recalling the definition of the energy norm ∥⋅ ∥E and employing the estimates of Lemma 1 we obtain
that is
where the last step follows by observing that \(\frac{h_{K}^{2}} {p_{K}^{3}} <1\) and \(\frac{1} {p_{K}} <1\) for any \(K \in \mathcal{T}_{h}\).
4.1 Error Estimates in the Energy Norm
In this section we present a priori error estimates in the natural energy norm. Assuming that the exact solution u is regular enough, i.e., \(\mathbf{u}\vert _{K} \in [H^{s_{K}}(K)]^{d}\) for any \(K \in \mathcal{T}_{h}\), with s K ≥ 2, with standard arguments it is also possible to show that formulation (16) is strongly consistent, i.e.,
From the above identity, we can obtain the following relation for the error e = u − u h
which serves as the basis for the forthcoming error estimates.
Theorem 1 (A-Priori Error Estimate in the Energy Norm)
Let u be the exact solution of problem (1) and let u h be its approximation based on employing the semidiscrete DG formulation given in (16), with a penalty parameter α chosen large enough, cf. (7). If, for any time t ∈ [0, T], the exact solution u(t) and its two first temporal derivatives belong \([H^{s_{K}}(K)]^{d}\) , \(K \in \mathcal{T}_{h}\) , s K ≥ 2, then
Before reporting the proof of Theorem 1 we recall the integration by parts formula
that holds for w, v regular enough and for any scalar product (⋅ , ⋅ )∗
Proof
Let Π hp u ∈ V hp be the interpolant defined as in Lemma 4. By decomposing the error as e = e π − e h, with e π = u −Π hp u and e h = u h −Π hp u, (17) becomes:
By taking v = e h in the above identity, we have
Reasoning as in the proof of Theorem 1, we have
provided that the penalty parameter α is chosen large enough; cf. (7). Integrating (19) in time between 0 and t and using that e h(0) = u h(0) − u π(0) = 0, we get
where the second step follows based on employing the Cauchy-Schwarz inequality together with integration by parts formula (18) with w = e π, v = e h and \((\cdot,\cdot )_{{\ast}} = \mathcal{A}(\cdot,\cdot )\), whereas the third one follows from Lemma (8). From the Young inequality
we can suitably choose ε and rewrite (25) as
Applying Gronwall’s Lemma 3 we get
Finally, from the Cauchy-Schwarz inequality and the above bound, and taking the supremum over t ∈ (0, T]
The proof is completed by applying Lemma 4.
Remark 1
If the mesh size is quasi uniform, i.e. \(h =\max _{K\in \mathcal{T}_{K}}h_{K} \approx h_{K}\) for any \(K \in \mathcal{T}_{h}\), the polynomial approximation degree is uniform, i.e. p K = p for any \(K \in \mathcal{T}_{h}\), and the exact solution satisfies u | K , u t | K , u tt | K ∈ [H s(K)]d for any \(K \in \mathcal{T}_{h}\) and for any t ∈ [0, T], with s ≥ p + 1, the error estimate of Theorem 1 becomes
The above bounds are optimal in h and suboptimal in p by a factor p 1∕2; see, e.g., [19, 29] for analogous bounds for stationary (scalar) second order elliptic problems. Optimal error estimates with respect to the polynomial approximation degree can be shown either using the projector of [17] provided the solution belongs to a suitable augmented space, or whenever a continuous interpolant can be built; cf. [37].
4.2 Error Estimates in the L 2 Norm
In this section we present a priori error estimates in the L 2 norm. We follow the approach of [13] for second order hyperbolic equations, and introduce, for a regular enough vector-valued function w, the elliptic-projection operator Π w defined as
We immediately have
where Π hp is the interpolant of Lemma 4, and where the second step follows from Lemma 2 and the definition (22)
We also recall the following Poincaré–Friedrichs inequality valid for piecewise vector–valued H 1 functions
cf. [10]. Using that \(\sum _{K\in \mathcal{T}_{h}}\|\nabla \mathbf{v}\|_{L^{2}(K)} \leq \|\varepsilon (\mathbf{v})\|_{L^{2}(\mathcal{T}_{h})}\), and from the definition of the DG norm and of the stabilization function (12), it immediately follows
Theorem 2 (A-Priori Error Estimate in the L 2 Norm)
Under the Assumptions of Theorem 1 , it holds
with \(h =\max _{K\in \mathcal{T}_{h}}h_{K}\) , \(p =\min _{K\in \mathcal{T}_{h}}p_{K}\) and \(s =\min _{K\in \mathcal{T}_{h}}s_{K}\) .
Proof
As in the proof of Theorem 1 we decompose the error as e = e π − e h, where now e π = u h −Π u and e h = u −Π u, Π u being the elliptic projector defined in (22). With the above decomposition, the error equation (17) becomes:
By taking v = e h in the above identity and reasoning as in the proof of Theorem 1, we have
provided that the penalty parameter α is chosen large enough; cf. (7). Therefore, integrating in time between 0 and t and using that e h(0) = u h(0) − u π(0) = 0, we get
where the second step follows based on employing the Cauchy-Schwarz inequality. Applying Gronwall’s Lemma 3 we get
Next, from the Cauchy-Schwarz inequality, the above bound and the Poincaré–Friedrichs inequality (24), we immediately get
The estimate of the terms on the right hand sides is based on employing a duality argument; cf [13]. Let \(\boldsymbol{\xi }\) be the solution of the problem
As Ω is convex, the above problem is well-posed and its unique solution \(\boldsymbol{\xi }\in [H^{2}(\varOmega )]^{d}\) and satisfies \(\|\boldsymbol{\xi }\|_{H^{2}(\varOmega )}\lesssim \|\mathbf{e}^{\pi }\|_{L^{2}(\varOmega )}\). Moreover, it holds
where \(\boldsymbol{\xi }^{\pi } \in \mathbf{V}_{hp}\) is the interpolant of Lemma 4, and where the last steps follows from Lemma 2. Employing the interpolation estimates of Lemma 4 we have
where \(h =\max _{K\in \mathcal{T}_{h}}h_{K}\) and \(p =\min _{K\in \mathcal{T}_{h}}p_{K}\). The proof is completed by employing the error bounds of Theorem 1.
5 Numerical Results
The results of this section have been obtained with SPEED (http://speed.mox.polimi.it/), an open source Fortran code developed at Politecnico di Milano by the Laboratory for Modeling and Scientific Computing MOX of the Department of Mathematics and the Department of Civil and Environmental Engineering. SPEED is specifically designed for the simulation of seismic waves propagation problems, including both the ground motion induced by large scale earthquakes and soil-structure interaction in urban areas; see, e.g., [27]. Throughout the section we have set Δt = 10−5 so that the temporal component of the error is negligible compared to the spatial one.
In the first example we consider an elastic wave propagation problem in Ω = (0, 1)3, with ρ = λ = μ = 1. The source term f and the initial data are chosen so that the exact solution of problem (1) is given by
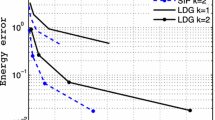
We first we consider both a tetrahedral and a hexahedral grid with mesh size h = 0. 5 and let p varies from 2 to 8. In Fig. 1a we report the error computed in the energy norm ∥⋅ ∥E at t = T = 0. 05 and as a function of the polynomial degree. As expected, an exponential convergence is observed. For the sake of comparison Fig. 1a also reports the corresponding computed errors obtained with a conforming Spectral Element method on the same tetrahedral grid. Next, we investigate the behavior of the error as a function of the grid size h for different polynomial degrees. We consider a sequence of uniformly refined tetrahedral grids starting from an initial decomposition of size h 0 = 0. 5. In Fig. 1b we report the computed errors measured in energy norm ∥⋅ ∥E at the final observation time t = T versus the grid size for p = 2, 3, 4. As expected, the results confirm a convergence rate of order p.

Example 1. (a) Computed errors versus p: computed errors measured in the energy norm ∥⋅ ∥E at t = T = 0. 05 versus the polynomial degree p for a tetrahedral mesh (DG-Tet) and a hexahedral grid (DG-Hex). The results are also compared with the corresponding one based on employing conforming Spectral Element method on the same tetahedral grid (SE-Tet). (b) Computed errors versus h: computed errors measured in the energy norm ∥⋅ ∥E at t = T versus the mesh size for p = 2, 3, 4. The dashed lines denote the expected slopes of the error curves
In the second test we consider a plane wave propagating along the vertical direction in a layered elastic half-space Ω = (0, 100) × (0, 100) × (−300, 0) m, see Fig. 2 (left). In Table 1 we report the depth and the material properties of the half-space Ω 1 and the layer Ω 2. The source plane wave is polarized in the x direction and its time dependency is given by a unit amplitude Ricker wave with peak frequency at 1 Hz. A dumping term proportional to 2ρξ u t + 2ξ 2 u, with ξ as in Table 1, is also added to the equation to take into account viscoelastic effects. The subdomains Ω 1 and Ω 2 are discretized with a hexahedral and a tetrahedral mesh, respectively, and the computational grids are built in order to have at least five grid points per wavelength, with p = 4 in both Ω 1 and Ω 2. Finally, we impose absorbing boundary conditions on the bottom surface, a free surface condition on the top surface, and homogeneous Dirichlet conditions for the y and z component of the displacement on the remaining boundaries. In Fig. 2 (right) we report the computed solution which is also compared with a reference semi-analytical solution u TH based on the Thomson-Haskell propagation matrix method, cf. [18, 40]. More precisely, Fig. 2 (right) shows the time history of the x component of the displacement u x recorded at the point R = (50, 50, 0) m. Finally, in Fig. 3 we report four snapshots of the deformed computational domain when invested by the plane wave. Two relevant physical effects can be observed: i) the wave field is amplified at the top of the domain due to the free surface condition; ii) reflections of the wave field take place inside the layer Ω 2 characterized by a softer material with respect to the half space Ω 1.

Example 2. Left: Computational domain Ω = Ω 1 ∪Ω 2. The elastic wave propagates from the bottom of Ω 1 to the top surface of Ω 2. Right: Computed time history of the x component of the displacement u x recorded at R = (50, 50, 0) m. The results are compared with a reference semi-analytical solution u TH obtained with the Thomson-Haskell propagation matrix method

Example 2. Snapshots of the x-component of the displacement u x .The deformed domain (colored) is compared with the non distorted one (black line)
References
M. Ainsworth, Dispersive and dissipative behaviour of high order discontinuous Galerkin finite element methods. J. Comput. Phys. 198(1), 106–130 (2004)
M. Ainsworth, R. Rankin, Technical note: a note on the selection of the penalty parameter for discontinuous Galerkin finite element schemes. Numer. Methods Partial Differential Equations 28(3), 1099–1104 (2012)
P.F. Antonietti, I. Mazzieri, A. Quarteroni, F. Rapetti, Non-conforming high order approximations of the elastodynamics equation. Comput. Methods Appl. Mech. Eng. 209–212, 212–238 (2012)
P.F. Antonietti, C. Marcati, I. Mazzieri, A. Quarteroni, High order discontinuous Galerkin methods on simplicial elements for the elastodynamics equation. Numer. Algorithms 71(1), 181–206 (2016)
P.F. Antonietti, B. Ayuso de Dios, I. Mazzieri, A. Quarteroni, Stability analysis of discontinuous Galerkin approximations to the elastodynamics problem. J. Sci. Comput. 68(1), 143–170 (2016)
P.F. Antonietti, A. Ferroni, I. Mazzieri, R. Paolucci, A. Quarteroni, C. Smerzini, M. Stupazzini, Numerical modeling of seismic waves by discontinuous Spectral Element methods. MOX Report 9/2017 (Submitted, 2017)
D.N. Arnold, An interior penalty finite element method with discontinuous elements. SIAM J. Numer. Anal. 19(4), 742–760 (1982)
D.N. Arnold, F. Brezzi, B. Cockburn, L.D. Marini, Unified analysis of discontinuous Galerkin methods for elliptic problems. SIAM J. Numer. Anal. 39(5), 1749–1779 (2001)
I. Babuŝka, M. Suri, The hp version of the finite element method with quasiuniform meshes. Math. Model. Numer. Anal. 21(2), 199–238 (1987)
S.C. Brenner, Korn’s inequalities for piecewise H 1 vector fields. Math. Comput. 73(247), 1067–1087 (2004)
J.D. De Basabe, M.K. Sen, M.F. Wheeler, The interior penalty discontinuous Galerkin method for elastic wave propagation: grid dispersion. Geophys. J. Int. 175(1), 83–93 (2008)
M. Dumbser, M. Käser, An arbitrary high-order discontinuous galerkin method for elastic waves on unstructured meshes - ii. the three-dimensional isotropic case. Geophys. J. Int. 167(1), 319–336 (2006)
T. Dupont, L 2-estimates for Galerkin methods for second order hyperbolic equations. SIAM J. Numer. Anal. 10, 880–889 (1973)
E. Faccioli, F. Maggio, R. Paolucci, A. Quarteroni, 2d and 3d elastic wave propagation by a pseudo-spectral domain decomposition method. J. Seimol. 1(3), 237–251 (1997)
A. Ferroni, P.F. Antonietti, I. Mazzieri, A. Quarteroni, Dispersion-dissipation analysis of 3D continuous and discontinuous Spectral Element methods for the elastodynamics equation. MOX Report 18/2016 (Submitted)
E.H. Georgoulis, E. Hall, P. Houston, Discontinuous Galerkin methods for advection-diffusion-reaction problems on anisotropically refined meshes. SIAM J. Sci. Comput. 30(1), 246–271 (2007/2008)
E.H. Georgoulis, E. Süli, Optimal error estimates for the hp-version interior penalty discontinuous Galerkin finite element method. IMA J. Numer. Anal. 25(1), 205–220 (2005)
N.A. Haskell, The dispersion of surface waves on multi-layered media. Bull. Seismol. Soc. Am. 43, 17–34 (1953)
P. Houston, C. Schwab, E. Süli, Discontinuous hp-finite element methods for advection-diffusion-reaction problems. SIAM J. Numer. Anal. 39(6), 2133–2163 (2002)
D. Komatitsch, J. Tromp, Introduction to the spectral element method for three-dimensional seismic wave propagation. Geophys. J. Int. 139(3), 806–822 (1999)
D. Komatitsch, J. Tromp, Spectral-element simulations of global seismic wave propagation - i. validation. Geophys. J. Int. 149(2), 390–412 (2002)
D. Komatitsch, J.-P. Vilotte, R. Vai, J. Castillo-Covarrubias, F. Snchez-Sesma, The spectral element method for elastic wave equations - application to 2-d and 3-d seismic problems. Int. J. Numer. Meth. Eng. 45(9), 1139–1164 (1999)
D. Komatitsch, J. Ritsema, J. Tromp, Geophysics: the spectral-element method, beowulf computing, and global seismology. Science 298(5599), 1737–1742 (2002)
M. Kser, M. Dumbser, An arbitrary high-order discontinuous Galerkin method for elastic waves on unstructured meshes - i. the two-dimensional isotropic case with external source terms. Geophys. J. Int. 166(2), 855–877 (2006)
D.J.P. Lahaye, F. Maggio, A. Quarteroni, Hybrid finite element–spectral element approximation of wave propagation problems. East-West J. Numer. Math. 5(4), 265–289 (1997)
I. Mazzieri, M. Stupazzini, R. Guidotti, C. Smerzini, Speed: spectral elements in elastodynamics with discontinuous Galerkin: a non-conforming approach for 3d multi-scale problems. Int. J. Numer. Meth. Eng. 95(12), 991–1010 (2013)
I. Mazzieri, M. Stupazzini, R. Guidotti, C. Smerzini, Speed: spectral elements in elastodynamics with discontinuous Galerkin: a non-conforming approach for 3D multi-scale problems. Int. J. Numer. Methods Eng. 95(12), 991–1010 (2013)
A.T. Patera, Spectral methods for spatially evolving hydrodynamic flows, in Spectral Methods for Partial Differential Equations (Hampton, VA, 1982) (SIAM, Philadelphia, 1984), pp. 239–256
I. Perugia, D. Schötzau, An hp-analysis of the local discontinuous Galerkin method for diffusion problems. J. Sci. Comput. 17(1–4), 561–571 (2002)
A. Quarteroni, Numerical models for differential problems, vol. 8, 2nd edn. MS&A. Modeling, Simulation and Applications. (Springer, Milan, 2014). Translated from the fifth (2012) Italian edition by Silvia Quarteroni
B. Rivière, M.F. Wheeler, Discontinuous finite element methods for acoustic and elastic wave problems, in Current Trends in Scientific Computing (Xi’an, 2002), vol. 329, Contemporary Mathematics (American Mathematical Society, Providence, 2003), pp. 271–282
B. Rivière, S. Shaw, M.F. Wheeler, J.R. Whiteman, Discontinuous Galerkin finite element methods for linear elasticity and quasistatic linear viscoelasticity. Numer. Math. 95(2), 347–376 (2003)
B. Rivière, S. Shaw, J.R. Whiteman, Discontinuous Galerkin finite element methods for dynamic linear solid viscoelasticity problems. Numer. Methods Partial Differential Equations 23(5), 1149–1166 (2007)
C. Schwab, p- and hp-Finite Element Methods. Numerical Mathematics and Scientific Computation (The Clarendon Press, Oxford University Press, New York, 1998). Theory and applications in solid and fluid mechanics
G. Seriani, E. Priolo, A. Pregarz, Modelling waves in anisotropic media by a spectral element method, in Mathematical and Numerical Aspects of Wave Propagation (Mandelieu-La Napoule, 1995) (SIAM, Philadelphia, 1995), pp. 289–298
C. Smerzini, R. Paolucci, M. Stupazzini, Experimental and numerical results on earthquake-induced rotational ground motions. J. Earthq. Eng. 13(Suppl. 1), 66–82 (2009)
B. Stamm, T.P. Wihler, hp-optimal discontinuous Galerkin methods for linear elliptic problems. Math. Comput. 79(272), 2117–2133 (2010)
R. Stenberg, Mortaring by a method of J. A. Nitsche, in Computational Mechanics (Buenos Aires, 1998) (Centro Internac. Métodos Numér. Ing., Barcelona, 1998)
M. Stupazzini, R. Paolucci, H. Igel, Near-fault earthquake ground-motion simulation in the grenoble valley by a high-performance spectral element code. Bull. Seismol. Soc. Am. 99(1), 286–301 (2009)
W.T. Thomson, Transmission of elastic waves through a stratified solid medium. J. Appl. Phys. 21, 89–93 (1950)
M.F. Wheeler, An elliptic collocation-finite element method with interior penalties. SIAM J. Numer. Anal. 15(1), 152–161 (1978)
Acknowledgements
Paola F. Antonietti and Ilario Mazzieri have been partially supported by the research grant no. 2015-0182 funded by Fondazione Cariplo and Regione Lombardia. Part of this work has been completed while Paola F. Antonietti was visiting the Institut Henri Poincaré (IHP), Paris. She thanks the Institute for the kind hospitality.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Antonietti, P.F., Ferroni, A., Mazzieri, I., Quarteroni, A. (2017). hp-Version Discontinuous Galerkin Approximations of the Elastodynamics Equation. In: Bittencourt, M., Dumont, N., Hesthaven, J. (eds) Spectral and High Order Methods for Partial Differential Equations ICOSAHOM 2016. Lecture Notes in Computational Science and Engineering, vol 119. Springer, Cham. https://doi.org/10.1007/978-3-319-65870-4_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-65870-4_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65869-8
Online ISBN: 978-3-319-65870-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)