
Abstract
The precision positioning technology has developed for a long time and played a significant role in many fields. However, most precision positioning systems designed before only have one or two degrees of freedom, which greatly limits the application. In view of this, a kind of three-degrees-of-freedom (3-DOF) macro-micro precision positioning system is investigated and analyzed in the paper. The macro-micro precision positioning system is designed suitable for application in vacuum environment, which includes two main parts such as 3PRR (3 degrees of freedom, each branch consists of a prismatic pair (P) drive and two rotating pairs (R)) planar parallel platform and piezoelectric micro stage. Before conducting the experiment of macro-micro precision positioning system, it is necessary to investigate the loading effect on the 3PRR planar parallel platform. The loading experiment has showed that different loads have some effect on positioning accuracy and standard variance, but the positioning error is much less than the travel range of micro positioner. Then the experiment combining 3PRR planar parallel platform and piezoelectric micro stage has been carefully conducted by using laser interferometer as feedback control measurement. The experimental results demonstrate that the requirement of high positioning precision and large travel range can be simultaneously met by using the macro-micro precision positioning system.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays precision positioning technology requires larger travel range and higher precision, which plays an important role in the defense industry, aerospace, precision optical, biological and medical, precision processing and manufacturing fields [1]. For example, the key problem of high performance chip package positioning system is how to coordinate the contradiction between the high speed and high precision and how to solve the conflict between large travel and high precision. A number of domestic and foreign scientific institutions have carried out related research work and developed some high-speed and high-precision bonding machines [2, 3].
Generally speaking, precision positioning technology is composed of the macro positioner and micro positioner. A. Sharon is the first scholar who proposed the concept of combining macro and micro stages together at Massachusetts Institute of Technology [4]. From then on, a lot of researchers have shown great interest in the macro-micro precision positioning system. Liu Hongzhong designed a kind of macro-micro ultra precision positioning system using double servo control and Chebyshev digital filter, which performed with travel range of 200 nm and positioning accuracy of 8 nm. The macro and micro positioning system was composed of ball screw guide rail and piezoelectric actuator, respectively [5]. In 2010, Chien-Hung Liu et al. developed a set of nanometer positioning platform with large travel range of 300 mm × 300 mm and positioning accuracy of 10 nm. The micro stage of piezoelectric actuator was installed in the traditional ball screw system with PID closed-loop control and measuring instrument of laser interferometer [6]. László Juhász et al. also developed a kind of macro-micro positioning platform, which combined the conventional servo motor of precision ball screw guide with the embedded piezoelectric actuator. It used the grating scale as closed-loop control feedback test with maximum travel range of 100 mm, maximum speed of 125 mm/s, and resolution of 2 nm [7]. The ultra precision platform composed of precise ball screw drive and voice coil motor with aerostatic slide was proposed by Hidenori Shinno et al. The laser interferometer was used as feedback measurement system. The maximum stroke of the platform could reach 150 mm, the positioning accuracy was 0.3 nm, and the maximum speed was 220 mm/s [8].
From the foregoing, most macro-micro precision positioning systems only have one or two degrees of freedom and can not be used in vacuum environment such as scanning electron microscope (SEM). Then it is necessary and significant to investigate a kind of macro-micro precision positioning 3-DOF system for application in vacuum environment. There are many types of mechanisms have been developed as macro positioner, such as 3RRR (3 degrees of freedom, each branch consists of three rotating pairs (R)), 4RRR (4 degrees of freedom, each branch consists of three rotating pairs (R)) and 3PRR planar parallel mechanism [9]. The micro positioner also has attracted many researchers’ interest and has been commercialized for a long time [10]. A kind of macro-micro precision positioning system with 3PRR planar parallel mechanism and piezoelectric micro stage is introduced and investigated in this paper. Firstly the experimental setup is shown and introduced in Sect. 2. Then analysis and experiment of loading effect on positioning accuracy is demonstrated in Sect. 3. At last, the experiment of macro-micro positioning system is conducted to show the improvement in positioning accuracy and travel range in Sect. 4. In the paper, laser interferometer is used as feedback control measurement, which means that only linear motion tracking but not circular motion tracking can be controlled. Therefore, the visual inspection and multiple sensors combination technique should be investigated to apply for the macro-micro positioning system in future work.
2 Introduction of the Experimental Setup
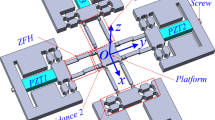
From Fig. 1, it can be seen that the experimental setup consists of macro positioner, micro positioner, laser interferometer, interference reflector, reflector and computer. The macro positioner is 3PRR planar parallel platform shown in Fig. 2(a), which is composed of static platform, mobile platform, sliding pair, revolving pair and grating scale. The sliding pair is driven by ultrasonic linear motor which can be used in vacuum environment. The macro positioner has three degrees of freedom as shown in Fig. 2(a), which are X axis translational freedom, Y axis translational freedom and rotation freedom around Z axis, respectively. Figure 3 shows the schematic diagram of macro-micro precision positioning system.

Photograph of macro-micro precision positioning system experimental setup.

Photograph and schematic diagram of 3PRR planar parallel platform.

Schematic diagram of macro-micro precision positioning system.
3PRR planar parallel positioning platform includes mechanical part and electric control part. Mechanical part is composed of three same kinematic chain, with each chain including ultrasonic linear motor, connecting rod, motor bracket and linear guide. The mobile platform is supported by three connecting rods of kinematic chains. The electric control part consists of linear grating encoder, photoelectric limit switch, motor driver, computer and motion control card.
The micro positioner is piezoelectric micro stage of PI company, which has compact size of 44 × 44 × 44 mm, weight of 320 g and XYZ strain gauge sensors. The travel range is 100 × 100 × 100 μm, and resolution is 0.2 nm.
Laser interferometer is used to measure the movement of reflector fixed on the micro positioner. In order to minimize the Abbe error and cosine error as far as possible, laser interferometer should be carefully fixed. The micro positioner is fixed on the mobile platform of macro positioner, which can realize the macro-micro superimposed motion. During the experiment, it is important to make the directions of motion of the macro positioner and micro positioner collinear.
Schematic diagram of 3PRR planar parallel mechanism is shown in Fig. 2(b). The closed-loop vector method is used to analyze the kinematic chain.
Because the sum of the closed loop vector is zero, then the kinematic constraint relation can be expressed as
where the meaning of E, F, G, M and O can be seen in Fig. 2(b), E is the fixed point, F is the first rotating pair, G is the second rotating pair, M is the geometric center of mobile platform, and O is the geometric center of static platform.
The projection along the X axis and Y axis of Eq. (1) can be expressed as
where \( X_{Ei} \) and \( Y_{Ei} \) is the coordinate of point \( E_{i} \), and \( X_{M} \), \( Y_{M} \), \( \alpha_{M} \) is X axis translational freedom, Y axis translational freedom and rotation freedom around Z axis, respectively.
By solving Eq. (2), driving parameters \( l_{i} \) and \( \alpha_{i} \) can be achieved and driving voltage of ultrasonic linear motor can be got for trajectory planning, which is also known as inverse kinematics. In order to make the paper concise, the expressions of \( l_{i} \) and \( \alpha_{i} \) are omitted.
3 Experiment of Loading Effect
The dynamic model describes the transfer relationship of the motion of planar parallel mechanism and driving joint force and includes two main methods such as positive dynamics and inverse dynamics. Inverse dynamics is that one can use the known motion of planar parallel mechanism to calculate the driving joint force. In the mechanism design phase, inverse dynamics has important significance in the motor selection, energy consumption analysis and trajectory planning. In the design stage of mechanism motion control, the inverse dynamics is the basis of mechanism dynamics control. The Lagrange method can be used to model the inverse dynamics of 3PRR planar parallel positioning platform and deduce the dynamics equations. However, without considering factors such as deformation and friction, this method only represents the ideal modeling of 3PRR planar parallel platform. It is hard to get the relationship between different loads and positioning accuracy. Therefore, experimental research on the relationship between different loads and positioning accuracy is necessary.
From the analysis above, one can see that before conducting the experiment of macro-micro precision positioning system, it is necessary to investigate the loading effect on the positioning accuracy of 3PRR planar parallel platform. The weights of 92 g and 200 g are chosen to conduct the experiment. In order to have a scientific comparative result, four groups of experiments of different loads have been designed and conducted. These different loads are 0 g, 92 g, 292 g and 400 g, respectively. Figure 4 shows the photograph of different weights and loading experimental setup, in which the weight is used to replace the micro positioner as load in Fig. 1.

Photograph of different weights and loading experiment.
In order to ensure experiment repeatable and accurate, the motion of 3PRR planar parallel platform is designed to move in straight line step by step from 0 mm to 12 mm and from 12 mm to 0 mm. Every loading experiment is designed to finish five linear motions to verify the repeatability positioning accuracy as Fig. 5 shows. Figure 5 only shows the loading experiment of 92 g load, and other experiments of 0 g, 292 g and 400 g can be showed in the same way. Figure 6 shows zoom in on the displacement of 2 mm of Fig. 5, in which the red point represents stable positioning point after the positioning motion has been finished. From Fig. 6, one can see that the positioning error will be adjusted and decreased in 0.5 s before the positioning motion is finished. The conventional PID feedback control is used to adjust the positioning error with parameter settings as \( K_{\text{P}} = 25,K_{\text{I}} = 0.5,K_{D} = 50 \).

Five linear motions step by step from 0 mm to 12 mm and from 12 mm to 0 mm of 92 g.

Zoom in on the displacement of 2 mm of Fig. 4.
The absolute value of positioning error of different loads is shown in Fig. 7, from which on can see that the error from 0 mm to 12 mm becomes bigger and bigger due to error accumulation and from 12 mm to 0 mm becomes smaller and smaller due to repeatability positioning accuracy. It can also be seen that the absolute value of positioning error of no load is the smallest compared with other experiments of 92 g, 292 g and 400 g load. With the weight increasing, the absolute value of positioning error will become a little bigger than that of no load experiment, but the error is still much less than the travel range of the micro positioner.

Absolute value of positioning error of different loads.
Figure 8 shows the standard deviation from displacement 0 mm to 12 mm, from which it can be seen that the standard deviation of no load is also the smallest compared with other experiments of 92 g, 292 g and 400 g. Therefore, from the experiment of loading effect, on can draw a conclusion that both the absolute value of positioning error and standard deviation of no load is the smallest compared with other experiments of 92 g, 292 g and 400 g load, but the maximum error of 14 μm is still in the micro positioner’s travel range of 100 μm. It should be noted that only loads of 0 g, 92 g, 292 g and 400 g are chosen in the experiment due to the micro positioner’s 320 g load. If the weight of load is bigger than 400 g, then it is beyond the scope of the discussion.

Standard deviation from displacement 0 mm to 12 mm of different loads.
4 Experiment of Macro-Micro Precision Positioning System
To validate the higher positioning accuracy of the macro-micro precision positioning system compared with the macro positioner, it is necessary to conduct an experiment of macro-micro precision positioning system. The motion of macro-micro precision positioning system is designed to move in straight line step by step from 0 mm to 12 mm and from 12 mm to 0 mm, which is almost the same as the experiment of loading effect of Sect. 3. The only difference is that the micro positioner will be used to compensate the positioning error of macro positioner step by step, which will greatly improve the positioning accuracy of system. The experimental setup of macro-micro precision positioning system is shown and illustrated in Fig. 1.
The flow chart of experiment of macro-micro precision positioning system is shown in Fig. 9, from which the experimental process can be concluded by the following steps. Firstly the experiment is prepared and displacement input \( s_{i} \) is set to start the motion of macro positioner. After the motion of macro positioner is finished, displacement \( s_{j} \) measured by laser interferometer is used to compare with displacement input \( s_{i} \). If the value of \( \left| {s_{i} - s_{j} } \right| \) is smaller than 0.20 μm, then the micro positioner keeps still and another displacement input \( s_{i} \) will be set. If the value of \( \left| {s_{i} - s_{j} } \right| \) is bigger than 0.20 μm, then the micro positioner begins moving and compensating error. After that, another displacement input \( s_{i} \) also will be set. After the linear motion from 0 mm to 12 mm and from 12 mm to 0 mm has finished, the experimental process is over.

Flow chart of experiment of macro-micro precision positioning system.
Figure 10 shows the linear motion step by step from 0 mm to 12 mm and from 12 mm to 0 mm of macro-micro precision positioning system. Zoom in on the displacement of 2 mm and 9 mm of Fig. 10 is shown in Fig. 11, from which one can see that the micro positioner can largely compensate the positioning error of macro positioner, which will greatly improve the positioning accuracy of system. In Fig. 11(a), it can be seen that the positioning error of 2 mm has decreased from 4.30 μm to 0.20 μm. In Fig. 11(b), it can be seen that the positioning error of 9 mm has decreased from 2.25 μm to 0.25 μm.

Linear motion step by step from 0 mm to 12 mm and from 12 mm to 0 mm of macro-micro precision positioning system.

Zoom in on the displacement of 2 mm and 9 mm of Fig. 9.
Figure 12 shows the absolute value of positioning error of linear motion from 0 mm to 12 mm and from 12 mm to 0 mm. In Fig. 12(a), one can see that the maximum positioning error of linear motion from 0 mm to 12 mm has decreased from 4.33 μm to 0.20 μm. The minimum positioning error of linear motion from 0 mm to 12 mm has decreased from 0.66 μm to 0.02 μm. In Fig. 12(b), it can be seen that the maximum positioning error of linear motion from 12 mm to 0 mm has decreased from 5.74 μm to 0.27 μm. The minimum positioning error of linear motion from 12 mm to 0 mm has decreased from 0.26 μm to 0.01 μm. Therefore, one can draw a conclusion that the macro-micro precision positioning system can greatly improve the positioning accuracy and also can enlarge the travel range.

Absolute value of positioning error of linear motion from 0 mm to 12 mm and from 12 mm to 0 mm.
5 Conclusions
A kind of 3-DOF macro-micro precision positioning system with 3PRR planar parallel mechanism and PI nanocube-piezo stage is introduced and investigated in this paper. Laser interferometer is used to measure the linear motion displacement of macro-micro precision positioning system for feedback control. Firstly the experimental setup is shown and introduced in Sect. 2, which consists of macro positioner, micro positioner, laser interferometer, interference reflector, reflector and computer. Then modeling analysis and experiment of loading effect is demonstrated in Sect. 3, from which one can see that there is some loading effect on positioning accuracy and standard variance of macro positioner, but the positioning error is much less than the travel range of micro positioner. At last, the experiment of macro-micro precision positioning system is conducted to show the improvement in positioning accuracy and travel range and experimental results show good performance.
References
Choi, S.B., Han, S.S.: Position Control System Using ER Clutch and Piezoactuator. Smart Structures and Materials 2003: Smart Structures and Integrated Systems, vol. 5056 (2003)
Liau, L.C.K., Chen, B.S.C.: Process optimization of gold stud bump manufacturing using artificial neural networks. Expert Syst. Appl. 29, 264–271 (2005)
Ang, X.F., Zhang, G.G., Wei, J.: Temperature and pressure dependence in thermo compression gold stud bonding. Thin Solid Films 504, 379–383 (2006)
Sharon, A., Hardt, D.: Enhancement of robot accuracy using endpoint feedback and a macro-micro manipulator system. In: American Control Conference, pp. 1836–1845 (1984)
Hongzhong, L., Bingheng, L., Yucheng, D., Hangsong, L., Le, Y.: Study of ultra precision positioning system and linearity compensation. J. Xi’an Jiaotong Univ. 37(3), (2003)
Liu, C.H., Jywe, W.Y., Jeng, Y.R.: Design and control of a long-traveling nano-positioning stage. Precis. Eng. 34(3), 497–506 (2010)
Juhász, L., Maas, J., Borovac, B.: Parameter identification and hysteresis compensation of embedded piezoelectric stack actuators. Mechatronics 21(1), 329–338 (2011)
Shinno, H., Yoshioka, H., Sawano, H.: A newly developed long range positioning table system with a sub-nanometer resolution. CIRP Ann. 60(1), 403–406 (2011)
Jiasi, M.: Research of the planar 3PRR parallel positioning system under the micro/nano operating environment. South China University of Technology (2016)
Wang, R., Zhang, X.: A planar 3-DOF nanopositioning platform with large magnification. Precis. Eng. 46, 221–231 (2016)
Acknowledgment
The authors gratefully acknowledge these support agencies such as the National Natural Science Foundation of China (Grant No. U1501247, U1609206), the Science and Technology Planning Project of Guangdong Province (Grant No. 2014B090917001), the Natural Science Foundation of Guangdong Province (Grant No. S2013030013355) and the Scientific and Technological Project of Guangzhou (Grant No. 2015090330001).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Xie, L., Qiu, Z., Zhang, X. (2017). Experimental Research of Loading Effect on a 3-DOF Macro-Micro Precision Positioning System. In: Huang, Y., Wu, H., Liu, H., Yin, Z. (eds) Intelligent Robotics and Applications. ICIRA 2017. Lecture Notes in Computer Science(), vol 10464. Springer, Cham. https://doi.org/10.1007/978-3-319-65298-6_69
Download citation
DOI: https://doi.org/10.1007/978-3-319-65298-6_69
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65297-9
Online ISBN: 978-3-319-65298-6
eBook Packages: Computer ScienceComputer Science (R0)